S-ar putea să vă placă și
- Caterpillar Cat 329E L Excavator (Prefix ZCD) Service Repair Manual (ZCD00001 and Up)Document29 paginiCaterpillar Cat 329E L Excavator (Prefix ZCD) Service Repair Manual (ZCD00001 and Up)kfm8seuudu0% (1)
- Fixture For 3500 Cylinder Head MachiningDocument7 paginiFixture For 3500 Cylinder Head MachiningAndrés BlancoÎncă nu există evaluări
- Caterpillar 320D2 Excavator Service Repair Manual Nbf00001-UpDocument2.431 paginiCaterpillar 320D2 Excavator Service Repair Manual Nbf00001-UpOrlando Rodriguez88% (17)
- Zx330 Workshop w1hh e 01 PDFDocument752 paginiZx330 Workshop w1hh e 01 PDFAnonymous ByaV1f100% (3)
- Wireless Gesture Control RobotDocument40 paginiWireless Gesture Control Robotdebanjan sarkar67% (3)
- Line Follower RobotDocument16 paginiLine Follower RobotRohit sharmaÎncă nu există evaluări
- Ref Report PPT Eccentric Connectic Rod 2022 Report Stage-1-1 SagarDocument44 paginiRef Report PPT Eccentric Connectic Rod 2022 Report Stage-1-1 SagarSuyash KhadeÎncă nu există evaluări
- Vol.2 General Specification of ZJ50D RigDocument57 paginiVol.2 General Specification of ZJ50D Rigwaleed100% (1)
- Operation Manual: FWM1200 FWM1200ADocument27 paginiOperation Manual: FWM1200 FWM1200AnicolasÎncă nu există evaluări
- Line Following Robot With Color Detection PDFDocument10 paginiLine Following Robot With Color Detection PDFpaishkepeng100% (1)
- Inter-Vehicle Communication Using Li-Fi Technology (Report)Document42 paginiInter-Vehicle Communication Using Li-Fi Technology (Report)kaveriÎncă nu există evaluări
- BasicsOfElectricalDrives4thEditionbyPillai 1Document245 paginiBasicsOfElectricalDrives4thEditionbyPillai 1Anonymous lV8E5mEOÎncă nu există evaluări
- Mini Project SrihariDocument14 paginiMini Project SrihariAshik GRÎncă nu există evaluări
- New Microsoft Word DocumentDocument21 paginiNew Microsoft Word Documentأحمد دعبسÎncă nu există evaluări
- Pavani Mini Project - 115817Document23 paginiPavani Mini Project - 115817Yelagum RahulÎncă nu există evaluări
- A Robot Is A Mechanical or Virtual Artificial AgentDocument5 paginiA Robot Is A Mechanical or Virtual Artificial AgentrajeshÎncă nu există evaluări
- Hand Motion Controlled Robotic ArmDocument5 paginiHand Motion Controlled Robotic ArmRameshkumar JayaramanÎncă nu există evaluări
- Prosiding Paper 2010 EditDocument4 paginiProsiding Paper 2010 EditNizam RashidÎncă nu există evaluări
- Elite Project Report: Gesture Controlled RobotDocument17 paginiElite Project Report: Gesture Controlled RobotMallika 19Încă nu există evaluări
- Touch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoDocument4 paginiTouch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoseventhsensegroupÎncă nu există evaluări
- Radio Frequency Remote Control Car A Mini Project ReportDocument9 paginiRadio Frequency Remote Control Car A Mini Project ReportPoojan PavagadhiÎncă nu există evaluări
- Intelligent Smart Zone Based Vehicle Speed Control System Using RFDocument5 paginiIntelligent Smart Zone Based Vehicle Speed Control System Using RFSANGAVI SÎncă nu există evaluări
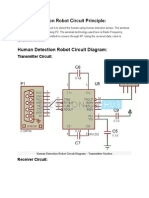
- Human Detection Robot Circuit PrincipleDocument4 paginiHuman Detection Robot Circuit PrincipleAli KhanÎncă nu există evaluări
- Accelerometer Based Gesture RobotDocument3 paginiAccelerometer Based Gesture RobotPirate MayurÎncă nu există evaluări
- Block Diagram: Fig: Virtual EnvironmentDocument2 paginiBlock Diagram: Fig: Virtual EnvironmentLavanya Vaishnavi D.A.Încă nu există evaluări
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocument5 paginiInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZLita ClaudiuÎncă nu există evaluări
- Smart GloveDocument8 paginiSmart GloveRakshit VigÎncă nu există evaluări
- Hand Gesture Controlled ARM: Open AccessDocument4 paginiHand Gesture Controlled ARM: Open AccessSuvobroto BanerjeeÎncă nu există evaluări
- Engineering Design Project: (Declared As Deemed-to-be-University U/s 3 of The UGC Act., 1956)Document15 paginiEngineering Design Project: (Declared As Deemed-to-be-University U/s 3 of The UGC Act., 1956)shubhÎncă nu există evaluări
- Formated ReportDocument23 paginiFormated ReportJackÎncă nu există evaluări
- GSM Based Fire Fighting RobotDocument35 paginiGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- Parking Garage Management and Parking Assistance DeviceDocument25 paginiParking Garage Management and Parking Assistance DeviceMoata GirmaÎncă nu există evaluări
- Smart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatDocument8 paginiSmart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatE-zat IlmanÎncă nu există evaluări
- Physics Model DiscriptionDocument5 paginiPhysics Model DiscriptionAbhinav AzadÎncă nu există evaluări
- FYP ProposalDocument5 paginiFYP ProposalYawar ShahÎncă nu există evaluări
- Telehealth Monitoring Based Myoelectric Prosthetic ArmDocument27 paginiTelehealth Monitoring Based Myoelectric Prosthetic ArmAll Engineering ElectronicsÎncă nu există evaluări
- Wireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectDocument51 paginiWireless Robot and Robotic Arm Control With Accelerometer Sensor ProjectAmandeep Singh KheraÎncă nu există evaluări
- Northern India Engineering CollegeDocument31 paginiNorthern India Engineering CollegeRaman Kapoor100% (1)
- Obstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialDocument7 paginiObstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialMUDAM ALEKYAÎncă nu există evaluări
- Water Level Indicator Using RFDocument4 paginiWater Level Indicator Using RFmsampurna0% (1)
- Electrical and Electronics Engineering Seminar Topic: Hand Gesture Robotic ArmDocument27 paginiElectrical and Electronics Engineering Seminar Topic: Hand Gesture Robotic ArmShubham Bodade100% (1)
- S.D.M. College of Engineering & Technology, Dharwad - 580 002Document8 paginiS.D.M. College of Engineering & Technology, Dharwad - 580 002Kumar NeerajÎncă nu există evaluări
- Research Proposal (Plaza)Document10 paginiResearch Proposal (Plaza)Edmarjan ConcepcionÎncă nu există evaluări
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDocument36 paginiAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineÎncă nu există evaluări
- Project File of Gesture Controlled RobotDocument36 paginiProject File of Gesture Controlled RobotTeena Sharma92% (13)
- "Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasDocument4 pagini"Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalÎncă nu există evaluări
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Document4 paginiVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujÎncă nu există evaluări
- Live Human Being Detection Wireless Remote Controlled RobotDocument4 paginiLive Human Being Detection Wireless Remote Controlled RobotnaveenÎncă nu există evaluări
- Human Detection Robot DetailsDocument6 paginiHuman Detection Robot DetailschirayilrichardÎncă nu există evaluări
- Embedded Based Derailment Prevention System Throuh Wireless Sensor NetworksDocument56 paginiEmbedded Based Derailment Prevention System Throuh Wireless Sensor NetworksChampi LssÎncă nu există evaluări
- Gesture Control Robot Using ArduinoDocument3 paginiGesture Control Robot Using ArduinoEditor IJTSRDÎncă nu există evaluări
- Accelerometer Based Gesture RobotDocument3 paginiAccelerometer Based Gesture RobotjaiÎncă nu există evaluări
- Technical Jurnal For Engineering ProjectDocument7 paginiTechnical Jurnal For Engineering ProjectAshGhanesenÎncă nu există evaluări
- Presented By: Group No:8Document16 paginiPresented By: Group No:8Priyanka TrivediÎncă nu există evaluări
- Automated Line FollowingDocument8 paginiAutomated Line FollowingManoj KumarÎncă nu există evaluări
- Numerical ProtectionDocument12 paginiNumerical ProtectionAkhilesh NimjeÎncă nu există evaluări
- Low Power Vlsi Circuits and Systems - Ajit PalDocument26 paginiLow Power Vlsi Circuits and Systems - Ajit PalAnushaÎncă nu există evaluări
- Literature Survey On Automatic Campus CabDocument5 paginiLiterature Survey On Automatic Campus CabGowtham S ShettyÎncă nu există evaluări
- Solar Based Pick and Place Robot Using Hand Motion ControlDocument4 paginiSolar Based Pick and Place Robot Using Hand Motion ControlFlux PrimeÎncă nu există evaluări
- Automatic Cab Signaling System For Rail EnginesDocument20 paginiAutomatic Cab Signaling System For Rail Enginessvijay_790Încă nu există evaluări
- Motion Controlled Pick & Place Obstacle Avoider Robotic VehicleDocument4 paginiMotion Controlled Pick & Place Obstacle Avoider Robotic VehicleibrahemppppÎncă nu există evaluări
- Electronics and Communication EngineeringDocument12 paginiElectronics and Communication Engineeringgokul_rajÎncă nu există evaluări
- AmbulanceDocument19 paginiAmbulanceSampath Kumar BejgamaÎncă nu există evaluări
- Gesture Controlled Robotics WorkshopDocument4 paginiGesture Controlled Robotics WorkshopswarnaasnlÎncă nu există evaluări
- Metro TrainDocument24 paginiMetro Trainguddu9Încă nu există evaluări
- Hand Gesture Control Robot PDFDocument3 paginiHand Gesture Control Robot PDFMd IrfanÎncă nu există evaluări
- Loadmaster 800i/8000i: On-Board Weighing SystemDocument22 paginiLoadmaster 800i/8000i: On-Board Weighing SystemDavid Lortes LiñaresÎncă nu există evaluări
- Kraz 255 BDocument10 paginiKraz 255 Bgokulmane117Încă nu există evaluări
- Lesson 1.1: Terminologies: Chapter 1: INTRODUCTIONDocument2 paginiLesson 1.1: Terminologies: Chapter 1: INTRODUCTIONJudyÎncă nu există evaluări
- Catalogue SBDocument4 paginiCatalogue SBNityanand SharmaÎncă nu există evaluări
- Physical Science: Quarter 3 Science Learning ModuleDocument111 paginiPhysical Science: Quarter 3 Science Learning ModuleSenrick MedranoÎncă nu există evaluări
- Swivelling 840d SLDocument38 paginiSwivelling 840d SLResearch1 amtdcÎncă nu există evaluări
- 1 Terminator Overview CatalogDocument16 pagini1 Terminator Overview CatalogirfanWPKÎncă nu există evaluări
- Trash Rake Cleaning: Exceptional Solutions Made by The System ProviderDocument8 paginiTrash Rake Cleaning: Exceptional Solutions Made by The System ProviderszizaÎncă nu există evaluări
- Angular Contact Ball Bearings, Double Row - 3312 ADocument2 paginiAngular Contact Ball Bearings, Double Row - 3312 AHamada HussienÎncă nu există evaluări
- Review On Multipurpose Agriculture RobotDocument8 paginiReview On Multipurpose Agriculture RobotIJRASETPublicationsÎncă nu există evaluări
- New Mini Power TillerDocument29 paginiNew Mini Power TillerArun Kumar R100% (6)
- Topic 15 Routine Maintenance in Keeping The Vessel Ship Shape Week 17Document41 paginiTopic 15 Routine Maintenance in Keeping The Vessel Ship Shape Week 17karl amido0% (1)
- 160M Maintenance IntervalDocument3 pagini160M Maintenance IntervalJoko WahonoÎncă nu există evaluări
- All-Subjects Bu 2 MechanicalDocument11 paginiAll-Subjects Bu 2 MechanicalJoshua Louis AseremoÎncă nu există evaluări
- Combijet Catalogue (Issue 6) - 1Document44 paginiCombijet Catalogue (Issue 6) - 1Максим Головко100% (1)
- Republic of The Philippines College of Engineering Department of Mechanical EngineeringDocument1 paginăRepublic of The Philippines College of Engineering Department of Mechanical EngineeringPj exeÎncă nu există evaluări
- Mantenimiento 950HDocument62 paginiMantenimiento 950HsergioÎncă nu există evaluări
- Bedienungsanleitung Elektrischer Schwenkkran PDFDocument72 paginiBedienungsanleitung Elektrischer Schwenkkran PDFtintucinbÎncă nu există evaluări
- Implementing Palletization Application of 4-Axis Igus Robot ManipulatorDocument20 paginiImplementing Palletization Application of 4-Axis Igus Robot ManipulatorKV SAI KIRANÎncă nu există evaluări
- Crank and Slotted Arm Quick Return MechanismDocument4 paginiCrank and Slotted Arm Quick Return MechanismLovekeshÎncă nu există evaluări
- Field TestDocument5 paginiField Testkudupudinagesh100% (3)