S-ar putea să vă placă și
- Simple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho ChoiDocument6 paginiSimple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho Choiankit407Încă nu există evaluări
- Loop Shapind Design ProcedureDocument4 paginiLoop Shapind Design ProcedureRitesh SinghÎncă nu există evaluări
- 656 OrtegaDocument6 pagini656 OrtegaAnonymous WkbmWCa8MÎncă nu există evaluări
- Design of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkDocument6 paginiDesign of Robust Power System Stabilizer Using Mixed Sensitivity Based H Output-Feedback Control in LMI FrameworkFernando RamosÎncă nu există evaluări
- P.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessDocument4 paginiP.L.D. Peres J.C. Geromel - H2 Control For Discrete-Time Systems Optimality and RobustnessflausenÎncă nu există evaluări
- Slow-Scale Bifurcation Behavior of Parallel-Connected Boost Converters Via Averaged ModelsDocument18 paginiSlow-Scale Bifurcation Behavior of Parallel-Connected Boost Converters Via Averaged ModelselsaordunaÎncă nu există evaluări
- Stabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlDocument5 paginiStabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlVirgili0Încă nu există evaluări
- A Robustly Stable Output Feedback Saturated Controller For The BDocument6 paginiA Robustly Stable Output Feedback Saturated Controller For The BAMIR SOHAILÎncă nu există evaluări
- Multiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachDocument6 paginiMultiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachDaltonVidorÎncă nu există evaluări
- And HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDocument6 paginiAnd HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDya IonutÎncă nu există evaluări
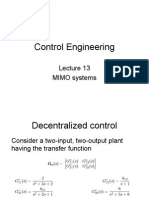
- Control Engineering: MIMO SystemsDocument26 paginiControl Engineering: MIMO SystemsPisicuta LaviniaÎncă nu există evaluări
- Digital PID Controllers: Different Forms of PIDDocument11 paginiDigital PID Controllers: Different Forms of PIDสหายดิว ลูกพระอาทิตย์Încă nu există evaluări
- Unconventional Phase-Locked Loops Simplify Difficult DesignsDocument18 paginiUnconventional Phase-Locked Loops Simplify Difficult DesignsAndrew JonesÎncă nu există evaluări
- Final Lab 3Document9 paginiFinal Lab 3Rania ChalabiÎncă nu există evaluări
- Phase Margin and Quality FactorDocument7 paginiPhase Margin and Quality FactorVIJAYPUTRAÎncă nu există evaluări
- Bode Plot Design PDFDocument15 paginiBode Plot Design PDFsmileuplease8498Încă nu există evaluări
- Processcontrol Topic13 PidtuningDocument15 paginiProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Optimization Phase-Locked Loop Circuits Via Geometric ProgrammingDocument4 paginiOptimization Phase-Locked Loop Circuits Via Geometric ProgrammingAlex WongÎncă nu există evaluări
- Tuning PI Controllers For Integrator/Dead Time ProcessesDocument4 paginiTuning PI Controllers For Integrator/Dead Time ProcessesRaadBassamÎncă nu există evaluări
- PID Analitico Conversor BuckDocument8 paginiPID Analitico Conversor BuckOdair TrujilloÎncă nu există evaluări
- Oliaei - Jitter in CT DSM - 1998Document4 paginiOliaei - Jitter in CT DSM - 1998Saleh Heidary ShalmanyÎncă nu există evaluări
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDocument7 paginiA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALÎncă nu există evaluări
- Sliding-Mode Control For DC - DC Converters With Constant Switching FrequencyDocument9 paginiSliding-Mode Control For DC - DC Converters With Constant Switching FrequencymarikkannanÎncă nu există evaluări
- Ee4302 Ca1Document51 paginiEe4302 Ca1Norul Ashikin NorzainÎncă nu există evaluări
- The International Conference On Renewable Energies: "ICRE-2010"Document30 paginiThe International Conference On Renewable Energies: "ICRE-2010"M VetriselviÎncă nu există evaluări
- CH 7Document10 paginiCH 7aprilswapnilÎncă nu există evaluări
- Simplified Stability Criterion Linear Discrete Systems : Greatly ImproveDocument8 paginiSimplified Stability Criterion Linear Discrete Systems : Greatly ImprovesakuractÎncă nu există evaluări
- Control Systems Group Project 2Document3 paginiControl Systems Group Project 2Yu-Yun ChangÎncă nu există evaluări
- KHN Biquad Using OtaDocument4 paginiKHN Biquad Using OtaApoorva NeelabhÎncă nu există evaluări
- Journal Pre-Proofs: International Journal of Electronics and Commu-NicationsDocument27 paginiJournal Pre-Proofs: International Journal of Electronics and Commu-NicationspetruskaraÎncă nu există evaluări
- Transient Response Counts When Choosing Phase MarginDocument4 paginiTransient Response Counts When Choosing Phase Marginharis13harisÎncă nu există evaluări
- L.C Oscillator Tutorial: 1 AbstractDocument18 paginiL.C Oscillator Tutorial: 1 AbstractChi PhamÎncă nu există evaluări
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDocument4 paginiRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsÎncă nu există evaluări
- Workshop 4 - Draft2Document6 paginiWorkshop 4 - Draft2Saatwick MathurÎncă nu există evaluări
- IN 227 Control Systems Design: Lectures 7 and 8Document15 paginiIN 227 Control Systems Design: Lectures 7 and 8AbhinavÎncă nu există evaluări
- Design ControllerDocument34 paginiDesign ControllerMaezinha_MarinelaÎncă nu există evaluări
- Vilanova - Pid Tuning For Cascade Control System DesignDocument4 paginiVilanova - Pid Tuning For Cascade Control System DesignCarlos BellatinÎncă nu există evaluări
- Annamalai PaperDocument9 paginiAnnamalai PaperPrabu BaskaranÎncă nu există evaluări
- A Passive Repetitive Controller For Discrete-Time Finite-Frequency Positive-Real SystemsDocument5 paginiA Passive Repetitive Controller For Discrete-Time Finite-Frequency Positive-Real SystemsCarlos EduardoÎncă nu există evaluări
- AS-74 3125 Chap 9 PrintDocument17 paginiAS-74 3125 Chap 9 PrintMohamed BerririÎncă nu există evaluări
- Simulation of A 2.5 GHZ Using Qucs A Tutorial By: Low-Pass Filter With A Maximally Flat ResponseDocument17 paginiSimulation of A 2.5 GHZ Using Qucs A Tutorial By: Low-Pass Filter With A Maximally Flat ResponseM.SadatÎncă nu există evaluări
- Pid 2Document5 paginiPid 2Sanyaolu AdebodunÎncă nu există evaluări
- Periodic Disturbance Rejection: Part II - Pole-Placement ControlDocument7 paginiPeriodic Disturbance Rejection: Part II - Pole-Placement ControlAbdo AliÎncă nu există evaluări
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocument53 paginiControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarÎncă nu există evaluări
- Math 5Document37 paginiMath 5Anonymous UrzdtCB0IÎncă nu există evaluări
- JUNE 2013 Solved Question Paper: 1 A: Compare Open Loop and Closed Loop Control Systems and Give Jun. 2013, 6 MarksDocument40 paginiJUNE 2013 Solved Question Paper: 1 A: Compare Open Loop and Closed Loop Control Systems and Give Jun. 2013, 6 MarksmanjulaÎncă nu există evaluări
- Astrom ch7 PDFDocument18 paginiAstrom ch7 PDFSandra GilbertÎncă nu există evaluări
- Control SystemsDocument10 paginiControl SystemsSagaraptor RexÎncă nu există evaluări
- Lab 8Document12 paginiLab 8awalu23Încă nu există evaluări
- Tuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemDocument5 paginiTuning Method of PI Controller With Desired Damping Coefficient For A First-Order Lag Plus Deadtime SystemAnonymous WkbmWCa8MÎncă nu există evaluări
- Settling Time of OpampDocument7 paginiSettling Time of OpampTumay KanarÎncă nu există evaluări
- Pulse-Width Modulated D.c.-D.c. ConvertersDocument26 paginiPulse-Width Modulated D.c.-D.c. ConvertersDeepak NayakÎncă nu există evaluări
- Lab RobotikaDocument15 paginiLab RobotikaVivaldi KhathamiÎncă nu există evaluări
- Characterization of High-Q Resonators For Microwave Filter ApplicationsDocument4 paginiCharacterization of High-Q Resonators For Microwave Filter ApplicationshazardassÎncă nu există evaluări
- Ravanbod 2012Document10 paginiRavanbod 2012Janki KaushalÎncă nu există evaluări
- Notes On Control Systems 05Document11 paginiNotes On Control Systems 05Yazdan RastegarÎncă nu există evaluări
- Digital-Controller Parameter-Tuning Application Supply: To Switch-Mode PowerDocument6 paginiDigital-Controller Parameter-Tuning Application Supply: To Switch-Mode PowermonisivaÎncă nu există evaluări
- Ex 1 3Document8 paginiEx 1 3aprilswapnilÎncă nu există evaluări
- 4 Kalash PoojanDocument8 pagini4 Kalash PoojanaprilswapnilÎncă nu există evaluări
- Appendix Matrix Introduction: A.1 BasicsDocument10 paginiAppendix Matrix Introduction: A.1 BasicsaprilswapnilÎncă nu există evaluări
- 1 Deep Shankha PoojaDocument2 pagini1 Deep Shankha PoojaaprilswapnilÎncă nu există evaluări
- Index: Linear State-Space Control SystemsDocument6 paginiIndex: Linear State-Space Control SystemsaprilswapnilÎncă nu există evaluări
- LQG CodesDocument11 paginiLQG CodesaprilswapnilÎncă nu există evaluări
- Trajectory Codes Re EntryDocument85 paginiTrajectory Codes Re EntryaprilswapnilÎncă nu există evaluări
- Appendix Continuing Matlab Example M-File: τ (t), and the output is the angular displacement θ (t) - ThisDocument9 paginiAppendix Continuing Matlab Example M-File: τ (t), and the output is the angular displacement θ (t) - ThisaprilswapnilÎncă nu există evaluări
- CH 1Document4 paginiCH 1aprilswapnilÎncă nu există evaluări
- Noise Shaping Transfer FunctionDocument7 paginiNoise Shaping Transfer FunctionaprilswapnilÎncă nu există evaluări
- CH 7Document10 paginiCH 7aprilswapnilÎncă nu există evaluări
- Mathematical Models of Complex Flexible Missile and Software For Control System Design and SimulationDocument6 paginiMathematical Models of Complex Flexible Missile and Software For Control System Design and SimulationaprilswapnilÎncă nu există evaluări
- Power System OscillationsDocument9 paginiPower System Oscillationssaghiram8071Încă nu există evaluări
- Solved Problems To Chapter 02 (Singh)Document7 paginiSolved Problems To Chapter 02 (Singh)Julie Hurley100% (1)
- Directive of Maharashtra Co-Operative Housing Society (Notification) Dt. 3.1.09Document5 paginiDirective of Maharashtra Co-Operative Housing Society (Notification) Dt. 3.1.09neelsterÎncă nu există evaluări
- Stability Kothmann PDFDocument17 paginiStability Kothmann PDFaprilswapnil100% (1)
- B-737 Linear Autoland Simulink Model: NASA/CR-2004-213021Document123 paginiB-737 Linear Autoland Simulink Model: NASA/CR-2004-213021Dalia MuraddÎncă nu există evaluări
- Kalman Apogee IIDocument63 paginiKalman Apogee IImhacker100% (1)
- AdvtNo9 2019Document17 paginiAdvtNo9 2019aprilswapnilÎncă nu există evaluări
- System Design Through M ®, Control Toolbox and S ®: Book ReviewDocument2 paginiSystem Design Through M ®, Control Toolbox and S ®: Book ReviewaprilswapnilÎncă nu există evaluări
- B-737 Linear Autoland Simulink Model: NASA/CR-2004-213021Document123 paginiB-737 Linear Autoland Simulink Model: NASA/CR-2004-213021Dalia MuraddÎncă nu există evaluări
- CH 24Document19 paginiCH 24aprilswapnilÎncă nu există evaluări
- Advances and Applications in Sliding Mode Control Systems: December 2014Document2 paginiAdvances and Applications in Sliding Mode Control Systems: December 2014aprilswapnilÎncă nu există evaluări
- Notification ECIL JR Technical Officer PostsDocument4 paginiNotification ECIL JR Technical Officer Postspulastya20Încă nu există evaluări
- B.T. Kumaon Institute of Technology: AdvertisementDocument1 paginăB.T. Kumaon Institute of Technology: AdvertisementaprilswapnilÎncă nu există evaluări
- UtkinDocument2 paginiUtkinRodrigo ArrudaÎncă nu există evaluări
- The Effect of Tail Fin Parameters On The PDFDocument17 paginiThe Effect of Tail Fin Parameters On The PDFaprilswapnilÎncă nu există evaluări
- Notification IIT Bombay Jr. Engineer Asst Other PostsDocument1 paginăNotification IIT Bombay Jr. Engineer Asst Other PostsaprilswapnilÎncă nu există evaluări
- Important Tips For Learning English Grammar - Exam TyaariDocument8 paginiImportant Tips For Learning English Grammar - Exam Tyaarisomu_645Încă nu există evaluări
- Piping SpecificationDocument3 paginiPiping SpecificationShashi RanjanÎncă nu există evaluări
- NCHRP Report 507Document87 paginiNCHRP Report 507Yoshua YangÎncă nu există evaluări
- Novell Course 3076 SUSE Upgrading To Certified Linux Engineer 10Document362 paginiNovell Course 3076 SUSE Upgrading To Certified Linux Engineer 10Legioner LegionerovÎncă nu există evaluări
- Dual-Phase, Quick-PWM Controllers For IMVP-IV CPU Core Power SuppliesDocument45 paginiDual-Phase, Quick-PWM Controllers For IMVP-IV CPU Core Power Supplieslucian1961Încă nu există evaluări
- Power PhrasesDocument23 paginiPower Phrasesname isÎncă nu există evaluări
- Spare Parts List: Hand-Held Gas Saw DS HS80-14"Document20 paginiSpare Parts List: Hand-Held Gas Saw DS HS80-14"mayoo1986Încă nu există evaluări
- Blogs To Submit Music ToDocument6 paginiBlogs To Submit Music Totheo theoÎncă nu există evaluări
- Relay Performance Testing: Jay Gosalia Vice President of Engineering and Marketing Doble Engineering Company, USADocument40 paginiRelay Performance Testing: Jay Gosalia Vice President of Engineering and Marketing Doble Engineering Company, USArashid rahmanÎncă nu există evaluări
- HDPE Pipe InstallationDocument7 paginiHDPE Pipe InstallationJeferson Binay-an100% (1)
- Scarabeo 200 I e 0910Document66 paginiScarabeo 200 I e 0910ΧΑΡΑΛΑΜΠΟΣΣΕΛΙΜΗΣÎncă nu există evaluări
- Thought Leadership Is The New Sales PitchDocument8 paginiThought Leadership Is The New Sales PitchChad NelsonÎncă nu există evaluări
- Thread CuttingDocument7 paginiThread CuttingJulia Turpo SuarezÎncă nu există evaluări
- 3UG46251CW30 Datasheet enDocument5 pagini3UG46251CW30 Datasheet enDante AlvesÎncă nu există evaluări
- Alternator LSA42.3j enDocument12 paginiAlternator LSA42.3j enArdi Wiranata PermadiÎncă nu există evaluări
- Palmtop Computer (Report of Early Usage)Document8 paginiPalmtop Computer (Report of Early Usage)rodrigur8036100% (2)
- Reducing Tee PDFDocument4 paginiReducing Tee PDFpankrasius herbudiÎncă nu există evaluări
- 2015 Lanzar Web Optimized PDFDocument58 pagini2015 Lanzar Web Optimized PDFrecursowebÎncă nu există evaluări
- Selfdrive Autopilot CarsDocument20 paginiSelfdrive Autopilot CarsPavan L ShettyÎncă nu există evaluări
- Management Information System KFCDocument29 paginiManagement Information System KFCTamilSelvan0% (1)
- Cebu Technological University: Republic of The PhilippinesDocument2 paginiCebu Technological University: Republic of The PhilippinesEngelbert RespuestoÎncă nu există evaluări
- HCF Spec 190 1.0 PDFDocument31 paginiHCF Spec 190 1.0 PDFvikulovÎncă nu există evaluări
- Aluminum History PDFDocument20 paginiAluminum History PDFelmardaÎncă nu există evaluări
- PLAN UPDATE 2020 r1Document101 paginiPLAN UPDATE 2020 r1David SusantoÎncă nu există evaluări
- Mempower Busduct - PG - EN - 6 - 2012 PDFDocument38 paginiMempower Busduct - PG - EN - 6 - 2012 PDFAbelRamadhanÎncă nu există evaluări
- Classifications of KeysDocument13 paginiClassifications of KeyssyampnaiduÎncă nu există evaluări
- Team Mate+AM+IT+Overview+12Document41 paginiTeam Mate+AM+IT+Overview+12epajueloÎncă nu există evaluări
- McbcomDocument72 paginiMcbcomopenjavier5208Încă nu există evaluări
- Ballastless TracksDocument20 paginiBallastless TracksYacoub Cheikh67% (3)
- Release Notes Xcode 4.5.2Document7 paginiRelease Notes Xcode 4.5.2Anonymous gdJiDHÎncă nu există evaluări
- The Seven Deadly Sins of Strategy ImplementationDocument4 paginiThe Seven Deadly Sins of Strategy ImplementationNavigators ReunionÎncă nu există evaluări