S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Easa Part 66 PDFDocument4 paginiEasa Part 66 PDFAhsan Malik25% (4)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- B1.1 & B2 Basic Notes - Sub Module 8.1 (Physics of The Atmosphere)Document25 paginiB1.1 & B2 Basic Notes - Sub Module 8.1 (Physics of The Atmosphere)Ahsan Malik100% (1)
- Environmental SustainabilityDocument3 paginiEnvironmental SustainabilityJoseph Michael Perez100% (1)
- Procedure Checklist For Fm200 InstallationDocument2 paginiProcedure Checklist For Fm200 InstallationJibril Lamai0% (1)
- Asme Y14.41 2003Document105 paginiAsme Y14.41 2003Emanuel Ovejita Arrese100% (3)
- Module 8.1 - B1B2 - Rev 00 (Full Permission)Document24 paginiModule 8.1 - B1B2 - Rev 00 (Full Permission)Ahsan MalikÎncă nu există evaluări
- NEW Sub Module 11.4 Air Conditioning and Cabin PressurisatioDocument66 paginiNEW Sub Module 11.4 Air Conditioning and Cabin PressurisatioAhsan Malik0% (1)
- Module 1.3 - B1B2 - Rev 00 (Full Permission)Document42 paginiModule 1.3 - B1B2 - Rev 00 (Full Permission)Ahsan MalikÎncă nu există evaluări
- Module 1.2 - B1B2 - Rev 00 (Full Permission)Document43 paginiModule 1.2 - B1B2 - Rev 00 (Full Permission)Ahsan MalikÎncă nu există evaluări
- Module 9 (Human Factors) Sub Module 9.9 (Hazards in The WorkDocument7 paginiModule 9 (Human Factors) Sub Module 9.9 (Hazards in The WorkAhsan MalikÎncă nu există evaluări
- PTC A, B1.1 & B2 Basic Notes - Sub Module 8.4 (Flight StabilDocument25 paginiPTC A, B1.1 & B2 Basic Notes - Sub Module 8.4 (Flight StabilAhsan MalikÎncă nu există evaluări
- Module 7 (Maintenance Practices) Sub Module 7.3 (Tools)Document99 paginiModule 7 (Maintenance Practices) Sub Module 7.3 (Tools)Ahsan Malik100% (2)
- Module 7 (Maintenance Practices) Sub Module 7.20 (Maintenanc PDFDocument22 paginiModule 7 (Maintenance Practices) Sub Module 7.20 (Maintenanc PDFAhsan Malik100% (1)
- PIA B - Basic - Module 1.1 (MATHS) FinalDocument44 paginiPIA B - Basic - Module 1.1 (MATHS) FinalAhsan MalikÎncă nu există evaluări
- Module 7 (Maintenance Practices) Sub Module 7.11 (Bearings)Document15 paginiModule 7 (Maintenance Practices) Sub Module 7.11 (Bearings)Ahsan MalikÎncă nu există evaluări
- PTC A, B1.1 & B2 Basic Notes - Sub Module 8.1 (Physics of THDocument23 paginiPTC A, B1.1 & B2 Basic Notes - Sub Module 8.1 (Physics of THAhsan MalikÎncă nu există evaluări
- Airworthiness Notice: Examinations of Basic B1.1 and B2Document8 paginiAirworthiness Notice: Examinations of Basic B1.1 and B2Ahsan MalikÎncă nu există evaluări
- Module 04 Electronic Fundamentals QuestionsDocument110 paginiModule 04 Electronic Fundamentals Questionsmmr38780% (5)
- Synchro and Resolver Hand BookDocument35 paginiSynchro and Resolver Hand BookAbdul KurniadiÎncă nu există evaluări
- PIA B - Basic - Module 1.2 (MATHS) Algebra FinalDocument23 paginiPIA B - Basic - Module 1.2 (MATHS) Algebra FinalAhsan MalikÎncă nu există evaluări
- Ano 066 Awrg 1.0Document128 paginiAno 066 Awrg 1.0HussainAhmedÎncă nu există evaluări
- Powerpoint Presentation : Topic:-Servomechanism and Control SystemsDocument13 paginiPowerpoint Presentation : Topic:-Servomechanism and Control SystemsAhsan MalikÎncă nu există evaluări
- RRLDocument3 paginiRRLNeil RosalesÎncă nu există evaluări
- Gautam Buddha University: ID Card Form (Please Fill Up The Form in Block Letters)Document1 paginăGautam Buddha University: ID Card Form (Please Fill Up The Form in Block Letters)ATUL SAXENAÎncă nu există evaluări
- Eseu EnglezaDocument1 paginăEseu EnglezaAndreea IoanaÎncă nu există evaluări
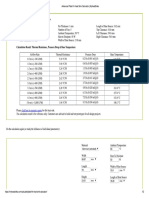
- Darcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataDocument2 paginiDarcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataMSÎncă nu există evaluări
- 5.pipeline SimulationDocument33 pagini5.pipeline Simulationcali89Încă nu există evaluări
- Capilares Diferentes GasesDocument14 paginiCapilares Diferentes GasesWalter RuedaÎncă nu există evaluări
- 5th Kannada EvsDocument256 pagini5th Kannada EvsnalinagcÎncă nu există evaluări
- Computer Science Ram PresentationDocument11 paginiComputer Science Ram Presentationapi-268896185100% (3)
- Arc Welding ProcessesDocument153 paginiArc Welding Processespratap biswasÎncă nu există evaluări
- 12556/gorakhdham Exp Third Ac (3A)Document2 pagini12556/gorakhdham Exp Third Ac (3A)Lovkesh GoyalÎncă nu există evaluări
- C D C SDocument4 paginiC D C SandriÎncă nu există evaluări
- PBL BrochureNov04Document26 paginiPBL BrochureNov04Pedro Antonio Lea Plaza Rico100% (1)
- Decline Curve AnalysisDocument37 paginiDecline Curve AnalysisAshwin VelÎncă nu există evaluări
- Advanced Plate Fin Heat Sink Calculator - MyHeatSinksDocument2 paginiAdvanced Plate Fin Heat Sink Calculator - MyHeatSinksHarsh BhardwajÎncă nu există evaluări
- Denr Administrative Order (Dao) 2013-22: (Chapters 6 & 8)Document24 paginiDenr Administrative Order (Dao) 2013-22: (Chapters 6 & 8)Karen Feyt Mallari100% (1)
- GSPDocument27 paginiGSPVirgil Titimeaua100% (1)
- West Zone: South-West Zone: South Zone: Central Zone: North Zone: North West Zone: East ZoneDocument6 paginiWest Zone: South-West Zone: South Zone: Central Zone: North Zone: North West Zone: East ZoneKanupriyamÎncă nu există evaluări
- Mode ReversionsDocument15 paginiMode ReversionsISHAANÎncă nu există evaluări
- Harley DavidsonDocument40 paginiHarley Davidsonristosk100% (1)
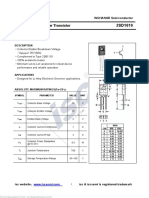
- 2SK2188Document2 pagini2SK2188Abigail HoobsÎncă nu există evaluări
- Content Marketing Solution StudyDocument39 paginiContent Marketing Solution StudyDemand Metric100% (2)
- Architectural, Museology, Urban DesignDocument201 paginiArchitectural, Museology, Urban DesignAbby VernonÎncă nu există evaluări
- Despiece Completo ThwaittesDocument60 paginiDespiece Completo ThwaittesJuan Antonio Cano Diaz100% (1)
- HIDROMONTAŽA - We Change EverythingDocument1 paginăHIDROMONTAŽA - We Change EverythingsamccoÎncă nu există evaluări
- COP24SummaryReport 2018Document14 paginiCOP24SummaryReport 2018AlfiahaleÎncă nu există evaluări
- Introduction To Compressed Air SystemDocument23 paginiIntroduction To Compressed Air SystemMohd Zulhairi Mohd NoorÎncă nu există evaluări
- Fiesta Mk6 EnglishDocument193 paginiFiesta Mk6 EnglishStoicaAlexandru100% (2)