Documente Academic
Documente Profesional
Documente Cultură
Estruturas Isostáticas - Maria Cascão Ferreira de Almeida
Încărcat de
Juliana Marotta Rodrigues0 evaluări0% au considerat acest document util (0 voturi)
91 vizualizări40 paginiestruturas isostaticas. maria ferrão engenharia civil
Drepturi de autor
© © All Rights Reserved
Formate disponibile
PDF sau citiți online pe Scribd
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentestruturas isostaticas. maria ferrão engenharia civil
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca PDF sau citiți online pe Scribd
0 evaluări0% au considerat acest document util (0 voturi)
91 vizualizări40 paginiEstruturas Isostáticas - Maria Cascão Ferreira de Almeida
Încărcat de
Juliana Marotta Rodriguesestruturas isostaticas. maria ferrão engenharia civil
Drepturi de autor:
© All Rights Reserved
Formate disponibile
Descărcați ca PDF sau citiți online pe Scribd
Sunteți pe pagina 1din 40
Maria Cascdo Ferreira de Almeida
Estruturas
isostaticas
Cui muita satistayao e oxgullio, acellel tareta de escrever 0 prefacto do
primeiro volume —Estruturas Isostaticas ~ do “Curso de Anglise Estrutural”
do minha ox alana Maria Cascio Perrcica de Almeida, profeasora do
Departamento de Estruturas da Faculdade de Engenharia da Universidade
Fedaval de Inir de Pars, na perioda de 1894 2.2002, quandapascatsaintegrar
‘Departamento de Mecanica Aplicada e Retrutuyas da Recala Palitéenica da
Universidade Federal do Rio de Janeiro.
H& muito, esto esxotadas as obras de Ademar Fonseca, Sydney
Santos e Sussekind, Antes de mais nada, pois, 0 livro da Maria Cascéo vem
suprimir essa falta. O conteido é completo; as linhas de estado e linhas
de influéncia das estruturas isostaticas planas e espaciais, dos diferentes
tipos ~vigas, pérticos, trelicas ~ sto detalhadas cuidadosamente. Intimeros
exercicios sao oferecidos, muitos dos quais, resolvidos passo a passo. Em
tudo, a exposicao é extremamente didatica, num estilo de entendimento
muito fécil, agradavel. Destaco os exemplos introdutérios com que procura
mostrar ao estudante o que significa uma estrutura
O estudio da Anilise Kstrutural, em seus flindamentos tao bem
expostos por Maria Cascio, ¢ indispensavel para que o engenheiro, que se
dedicara as estruturas, possa utilizar com seguranga os intimeros progra~
mas comipatacivuitis yue, forade divide, séu uecessdaivy, aias que reyuerca
adequada interpretagio.
Finalizo este breve prefaicio, desejando 8 autora que prostiga
ra puiblicagaa doe(@) volima(s) dedicada(e) ae estruturas hiperastiticas. O
sucesso é garantido.
Dirceu de Alencar Velloso
(in memorian)
Engenhelro civil Ds, professor live docente em engenhariae também
titular pela Universidade Federal do Rio de Janeiro (UPRW),
ol plesdente da Associagio Brasileira de Mechnica dos Solos
Engenharia Geotécnica (ABMS) ereeebeu titulo de professor emérito da
Fara Palitgenica da Universidade Rederal dn Rin de Taneiva em 2005
Profissionalmente reconhecido como engenheiro de fundagées, onde atuou
por mais de tinta anos, sendo admirado e respeitado pela comuntdade técnica
PREFACIO
er?
41 Concerros FunDaMenrais O°
2.1 ConctiTo Gena. o& ESTRUTURAS " 5
2.2 Concave Errorco ot Esmurunas 3 os]
2.3 Thos o& E.ewentos EstauTuRas 6 sg
1.4 Esrorgos ou Acts 7 a
1.5 Foncas Articaoas 7 =)
3.6 OBIETIVOS DA ANALISE EsTRUTURAL 18 WY
- 4o7 ESIRUIURAS RETICULARES 19
2 Concetros BASicos On ESTATICA 2
Bek Gravioczas Punmenras 21
— aaa Forga a
2.2.2 Momento 2
2.2 Sistemas ve Foncas B
aaa. Redudo de sistemas de Forgas a.um ponte 23
Exercicio 24 2%
& Exerccio 2.2 2%
2.3 tquulano Esranco 4
23. Detlocamentoe arcociadoe 24
23.2 Graus de iberdade 25
= 233. Apoios cs
23-4 EqlagBer do equllbrio otitco 2
2.4 Feevrmac e Smoneractes 06 Chucw.s 26
2.4.1 Simpificagdes geométricas ‘ 26
* 2.4.2 Representacao das forgas apicadas (cattegamentos) 7
2.13. Simpliiraghes analiieas 30
2.4.4 Representacio dos apoios 31
2.4.5 Wdealizagéa de um modelo 32
2.5 ReAcoes DE APOIO 32
- 25.1 Vigabiapoiada 32
25.2 Pértico plano 33
id 25:3 Caleulo das reacoes de apoio para caregamentos dstribuidos 34
2.8.4 Céleulo das weagies de apnia pars momentos concentrados 36
t Exerccio 2.3 36
2.6 Estancioaoe¢ Estastioaoe ot MopeLos PLaNos 37
+ 2.6.1 — Estlulurasexternamente lsostaticas 37
z 2.6.2 _Estruluras externamente hiperestaticas 27
2.63 Esituuras externamente hipostaticas 38
2.6.4 Esliuturas reals 38
3 Esroncos Soucmanres INTERNS a
4 Kerongor tne tm EarnuTunas Peanas 44
3.2 Chicuio 008 Estongos Inemwos ea vn Seg $ 45
xercico 3.41 46
xeric 3.2 9
3:3 RELAGOES FUNDAMENTAS om ESTATCA 50
33:1 Relacho entre esforgas normals e cargas
axis cistribuldas 51
3.3.2. Kelacdo entre carregamento transversal e
esforga cortantes @ momentos fetores 51
3-4 FUNCOES € Dincawas 00s Esroncas Soxicitanes INTERNOS 53
poe
4 Vicas Isostancas 57
4a Vicas Simpuss 58
quia, Vigas Biepoiadas 58
Exercicio 4.1 58
Bxerciio 4.2 60
Brechin 3 aaa
Brercicio 44 8
Exercicio 4.5 64
Exercicio 4.6 66
Bxercicio 4.7, oa
Exercicio 4.8 8
Brercitio 49 70
4.2 Asrecroa Reuevantesrann © Tragabe £03 Diacranns a”
4:3 PhinciPo on SuPeneosicko B
Exercicio 4.10 B
4.4 Vicas Encastanas e Lives 5
Brercicio4.11 5
Exercicio 412 7
Exercicio 413 B
4.5 Vicas Biapoinpas com BALANGOS 79
brercicin 414 ~
Fxercicio 415 80
Exercicio 4.16 at
4.6 Vics Gesser ai
4.6.1. Equagoes de conaicao a
4.6.2. Soluco por meio das equagoes de condicao 84
Exercicio 4.17 a4
4.7 Vicas INcumaDas 85
47-4 Camregamentos distibuidos ao longo das projeyies 86
4.72, Carregamentos distibuidos 2o longo da viga incinada 7
+5 Porricos ou Quapros IsosTAricos PLANOS 39
5.1 Ex0s GioBAs E Enos Locas a”
5e4. Enos globais 1
5ea2 Eos locais o
5.2 Etemenros bos Pésmicos PLanos 2
5-3 Pownicos Siances 92
53.1 Portico biapoiado 2
Bxercicio 51 v2
53.2. Portico engastaso e livre 94
533. Portico triarticulado 94
Brercicio 5.2 »
53.4, Pétion hianniada eam actrulacha @ trante (ou eccoes) 96
Bxercicio 5.3 96
5.4 Posmicos ov QuaoRos com BaRRAS CURVAS 98
5.4.4. ElKOS cUTVOS 2
Exercicio 5.4 101
5.5 Quaonos Couposros (Estaururas CoMPosTAS) 104
6 Taeticas IsosrAricas 105
6.1 —_Le1oe Formacio ons Treucas Simruss 108
6.2 MeTODOS DE ANAUSE DAS TREUGAS 108
6.3 ESTATICIDADE € EsTAAIIDADE DAS TRELGAS 108
i Ln
Exercicio 6.1 112
6.4 Mét0D0 bos Nes 112
Crercicio 6.2 113
6.5 Mérov0 be Maxiveut Cremona 14
6.6 Méron0 one Segdes (Méro00 oF Rerren) Me
6.7 Onenvacties Genus sonne as Treucas 118
6.8 TaEUCAS com Cancas Fora 008 Nos 19
Exercldo 6.3 120
6.9 —TreucAs Conpostas 122
6.10 Mér000 ve ResowusAo DAS TREICAS CoMPOsTAS 123
Crerekiv oat 124
Exercicio 6.5 126
6.4 Teeuicas Conruexas 128
Exercicio 6.6 128
77 EsTRUTURAS IsosTATICAS NO Espaco BI
7A TReLICAS Espacins 132
711 Verificagio da ectaticidade 132
7.2 Lei de formagao das trelicas simples espacial 133
7.13 Resolugdo das trelicas simples espaciais 133
Exerc 741 134
7.4.4 Classifcagdo das treligas espaciais 135
7-2 Gretnas 135
xercico /:2 137
Exercicio 73 138
ESTRUTURA PLANA Suimuerina « Caasrcamenre QuaLauen
Porricas Esprcias Isosranicos
Exorcico 74
8 Linas De InFLUENCIA DE EsTauTURAS ISOSTANICAS
Concerto
TRAGADO DAS LINAS DE INFLUENCIA
IMETODOS PARA OsTENGRO bas Li pas EsTRUTURAS ISOstATCAS
83.1 Método analitco
83.2 Método das deformadas verticals
Vioas Genoa
Treuigas
DerinicA0 00 Trem-Tiro
‘APUCAGHO D0 PrIciPio DA SuPERPOSIGAO
PESQUISA DOS VatoRes Maximos (Mt) € Minuiaos (MAX)
‘OnieTIvo Das Linas D€ INFLUENCIA ext PROveTOS De ESTRUTURAS
Susmenbas A Caras Mavels
Exercicio 8.1
BrouiocRAnA consinTADA
1.1 Conceito Geral DE
Estruturas
Uma ectrutura pode scr definida como uma
compasicéo de uma ou mais pecas, ligadas entre
sien mein exterior do mada a formar um siste-
maem equilibrio, Tal equilthrin pode ser estatien
(estudado na graduacao) ou dindmico (estudado,
em geral, na pés-graduacao). Este livro aborda a
Anilise Estatica.
CONCEITOS FUNDAMENTAIS
Uma estrutura 6, portanto, um con:
junto capaz de receber solicitacées externas,
denominadas ativas, absorvé-las internamente
¢ transmiti-las até seus apoios ou vinculos, onde
elas encontram um sistema de forgas externas
‘equilibrantes, denominadas forcas reativas.
Intimeros sao os exemplos de estru-
‘uras (Fig, 1.1): arvore, corpo humano, cadeira,
entxe outros. Na Engenharia, em particular, 0
conceito de estrutura esté associado a area de
intercose. Desta forma su esti uluras.
Fic. 1.1 Exemplos gerais de
seonpysoy sen0)53
fet, com
Distbuii simses ds coraas
rd iff or
vee {ITT HI
gee
fet, trp is
0
Fic, 1.2 Navios engenheiros navais)
@ Para o Engemheiro Aeronéutico: avides (Fig. 1.3).
asian
Fic, 1.3 Avidee (engenheiros aeronduticos)
@ Para o Engenheiro Mecinico: veiculos automotores e maquinas
(Fig. 14).
Fic, 1.4 Veiculos automotores €
Onibuscome via biapinds maguinas (engenheiros mecinicas)
© Para o Engenheito Civil: poutes (Fig, 1.5), viadutos, passarelas, partes
resistentes das edificagées (vesidenciais, euciciais ¢ inlustiiais), bat-
ragene, rodoviae, ferrovias entre outraa,
Contaventamento
Pio. 1.9 Pontes Ferroviarias
(engenbeiros civis)
1.2 Conceito Especirico be EstRuTURAS
Na Engenharia Civil, especificamente, denomina-se estrutura a parte resis-
tente de uma construcdo, a qual se aplica 0 conceito geral apresentada
anteriormente.
Em um prédio em construcéo pode-se claramente distinguir
alguns dos elementos estruturais que compdem a parte resistente, ou
estrutura, do prédio: vigas, lajes, paredes, pilares, sapatas e blocos, estes
2
g
3
8
g
é
&
1
seonpison sens
Fic. 1.6 Exemplos de
elementos estruturais numa
edificagao
dois iltimos sendo parte integrante das fundacées. Estes elementos, con-
forme ilustrado na Fig. 1.6, podem ser feitos de materiais diversos, sendo,
‘entretanto, os mais utilizados: concreto armado (em particular no Brasil),
concreto protendido, aco e madeira. F
Vigamento secur (tegen)
Mpssconitoueseoldolas preety) camuastncapdladerrarserp
suportando cargas do telhado,
SSS SS
Contaventamento ms
‘ongitucinl aa eel
yy =
rice
Sapataem Fechamento lateral
orem restate
earaas de vont Lae sarin am conerata
Na Fig. 1.7 pode-se observar a transmissio interna das forgas, do
ponto de aplicacao aos apoios, através de diferentes sistemas estruturais.
Os sistemas sao selecionados de acordo com aspectos funcionais e arquite-
‘ténicos. Observar que, embora as forcas aplicadas as estruturas tendam a
descer devido a acao da gravidade, os tirantes tém a capacidade de algé-las
(Fig. 1.78 e176).
Os elementos estruturais, assim como toda e qualquer estrutura,
devem apresentar ao prupriedailes de resistencia ¢ de rigidez, isto ¢, serem
capazes de resistir cargas, dentro de certos limites, sem se romperem € set
sofrer grandes deformagdes ou variagées de suas dimensdcs originais.
(Os conceitos de resieténcia o rigides cio importantes © devem
ser bem compreendidos.
Resistencia é a capacidade de transmitir as forcas internamente,
molécula por molécula, dos pontos de aplicacao aos apoios, sem que ocorra
aruptura da peca. Para analisar a capacidade resistente de uma estrutura é
necessario a determinacio:
© dos esforcos solicitantes internos —o que é feito na Andlise Estrutural
ou Estatica das Construgées;
© das tensdes internas — o que ¢ feito na Resisténcia dos Materiais,
5
o ff
od
| cabo
e
© . © ©
rane
Fic. 1.7 transimssao das tocas aos apoios atraves de: A) ponto; b) elemento tracionado; C) elemento $
comprimido; D) trelica: F, F, G: H) pértiens diverane: 2
3
&
Rigidez é a capacidade de nao deformar excessivamente, para o |
carregamento previsto, o que comprometeria o funcionamento e o aspecto
da pega. O calculo das deformasies ¢ feito na Resisténcia dos Materiais.
4.3, Tipos DE ELEMENTOS
EsTRUTURAIS.
Quanto as dimensdes e As diregdes das agies os elementos estruturais
podem ser classificados em uni, bie tridimensionais.
© Unidisnensionais (ou xeticulares):
Tstruturas reticulares adv esliulures wumpustas por elementus anid
‘mensionais, ou seja, cm que o comprimento prevalece sobre as outras
duas dimensées. Conforme ilustrado na Fig. 1.8, os elementos unidi-
Portcas Telgas Grelhas
aS EY —_— y
Fir, 18 Fetmituras raticulares formadas por elamentos unidimencionaie
seonpyses| senjns3,
mensionais podem ser simplificadamente representados através dos
seus eixos. Este curso é totalmente dedicado as estruturas reticulares,
as quais podem ser geometricamente planas (pérticos e treligas planas,
grelhas e vigas) ou espaciais (porticos e trelicas espaciais). Observar que
as grelhas (Fig. 1.8), embora geometricamente planas, tem as forcas
aplicadas perpendicularmente ao plano da estrutura,
© Bidimensionais
Detrututas bidimensionais 240 aquelas em que duas de suas dimenséco
prevalecem sobre a terceira, Exemplos de estruturas bidimensionais,
conforme ilustrado na Fig. 1.9: lajes, parades e cascas. As lajes 0 as pare-
des, embora geometricamente semelhantes, recebem denominacdes
diferentes em funcio da direcdo das acoes. Nas laies as forcas atuantes
sio perpendiculares ao plano da estrutura e nas paredes as forcas atu-
antes pertencem ao plano da estrutura, Como a maioria das forcas que
atuam nas edificacdes advém da a¢ao da gravidade sobre os corpos, as
lajes s20 elementos estruturais horizontais ou inclinados e as paredes
sao elementos estruturais verticais.
Lies caseas Paredes
Lop je
Avge px
Fic. 1.9 Estruturas bidimensionais
© Tridimensionais
Saoas estruturas macicas em queas trés dimensOes se comparam. Exem-
plos de estruturas tridimensionais, conforme ilustrado na Fig. 1.10:
locos de fundacées, blocos de coroamento de estacas ¢ estruturas de
barragens.
Biocodeestacs lace de fundagbo
Fic. 1.10 Bstruturas
tvidimensionais
1.4 Esrorcos ou Agoes
Os esforcos ou a¢des, na Engenharia Estrutural, se classificam conforme
indicado no Quadro 1.1. No modelo de pértico plano da Fig, 1.11 encon-
tram-se representados alguns exemplos.
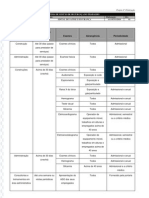
Quapro 1.1 Classiticacao dos estorcos ou acdes
ExterNos
Sourcrranres ‘Temperatura, recalque €
Gandlice ect tural) variacao de comprimento
Forgas: N,O,@ 0,
‘Momentos: T, My € Me
ResisTENTES ‘Tensdes normais o e Tangenciais T
(resisténcia dos materiais) (ou suas resultantes)
[srongos
Ou AGOES
ca InTERNOS
O objetivo do engenheiro civil é garantir. por meio
do célculo estrutural, que os esforcos resistentes internos (ERI)
sejam maiores que os esforgos solicitantes internos (ESI), ou seja:
ERI > ESI
1.5 Forcas APLICADAS
‘As forcas aplicadas as estruturas sio também denominadas acées
solicitantes externas ativas, cargas externas, carregamentos ou
simplesmente cargas. Na Engenharia Estrutural as forgas a serem,
consideradas em projeto dependem do fim a que se destinam
as estruturas, sendo, em geral, regulamentadas pelas normas.
No Brasil, as normas brasileiras sio elaboradas pela Associagao Brasileira Fie. 141 Reprosentagio
exquemética de acoes
externas diretas €
suskéeculay NBR, roguidas de mimerbe aspocindos aos axountoe abordedos) iadistas
de Normas Técnicas (ABNT). Estas normas sao identificadas pelas letras
‘Annorma brasileira que regulamenta ap Cargae para o Célculo de Eetruturas
de Baificages ¢ a NBR-6120 (antiga NB-5). A NBR 6123 (antiga NB-599)
regulamenta a aces de Parca davidaa an vent om edificaciion
Em algumas situagées especiais a definigio do carregamento
4 ser considerado fica a cargo do engenheiro projetista, de acordo com a
‘empresa contratante, Um exemplo bastante comum é o carregamento dina
‘ico oriundo de maquinas ou motores, o qual deve ser obtido por meio de
informagdes fornécidas pelo fabricante.
[As cargas podem ser classificadas quanto & posicao, a duragao, &
forma de aplicasio e & variasio com o tempo. Segundo esta classificaglo as
cargas podem ser:
E11CS FUYDANENTAS
é
8
|
8
© Quanto 4 posigao
fixas: cargas que nao mudam de posicio, ou que podem ser consideradas
come tal. As cargas normalmente consideradas nas edificagdes podem
ser dadas como exemplos.
snéveis. caryas que mudamn de posicao. As agoes dos verculos nas pontes
c viadutos s8o exemplos de cargas méveis,
© Quanto aduragao
pormanentee: agdce permanentes cobre ao catruturas, tais como o seu
peso proprio.
acidentais: sao as provenientes de aciies que padem ou no agir sobre ac
estruturas. Exemplos: sobrecarga (peso de pessoas, méveis et, om vima
residéncia) e a acao do vento.
© Quanto a forma de aplicacio
concentradas: quando se admite a transmissio de uma fora, de um
corpo a outro, através de um ponto. A forca concentrada nao existe,
sendo uma simplificacao de célculo.
&. cen | | distribuidas: quando se admite a transmissio de
hae i
PIS] saunjnsiss
uma forca de forma distributda, seja ao longo de
um comprimento (simplificagao de célculo) ou,
através de uma superficie.
Este tépico é mostrado detalhadamente adiante.
© Quanto a vartacao com 0 tempo
estaticas: so aquelas que, para efeito do com-
portamento estrulural, podem ser consideradas
como no variando com 0 tempo
dindmicas: quando a variasao da agéo ao longo
do tampo tam que ser considerada. Excmplos: aa
ages do vento, de correntes maritimas, de explo-
sdes ede terremotos.
pseudo-estaticas: algumas acies dinémicas
podem ser convenientemente consideradas por
meio de andlises pseudo-estéticas; é 0 que ocorre
‘muitas vezes com a acio do vento em estruturas
Mi
que permitam um célculo simplificado desta aco.
Dadas as estruturas submetidas a cargasativas
zs Lifes hiap poo 1.6 Osietivos pa ANALse EstRUTURAL
andilise estrutural é a determinacao:
** dos esforcos solicitantes internos N, Qy, Q., T,
My, © M,. as aces estaticas e/ou dinamicas que sobre ela
# das reacties de apain V, He M. atuam, os objetivos da Andlise Estrutural sio
* dos desiocamentos lineares ou angulares em
alguns pontos da estrutura: D e @. (Fig. 1.12):
Uma vez conhecida a estrutura e determinadas
Fic. 1.12 Objetivos da Andlise Estrutural
1. Determinasao dos Esforsos Solicitantes Internos (ESI)
Necessdria para o posterior dimensionamento dos elementos estrutu-
rais, os quais dependendo dos materiais utilizados irao requerer conhe-
cimentos das disciplinas: Concreto Armado, Concreto Protendido, Ago,
Madeira etc.
2, Determinagao das reacdes de apoio
Necessaria, na propria Analise Estrutural, para a consideracao da arto
maua entre os diversos elementos estruturals. As reciprocas das furyas
reativas de uma dada estrutura (ou elemento estrutural) sio utilizadas
como forgas ativas nas cotruturas sobre aa quai eata 2c apoia.
Determinagao dos deslocamentos em alguns pontos
As vezer nococsivia para a prépria resolugia da estrutura (Métadn dae
Teslacamentos para a andlise das ectrnturas hiperest4ticas). A limita:
cao da flecha maxima nas vigas é uma verificacao exigida pelas normas
para evitar a deformacdo excessiva, Em algumas situacées tal limitacéo
E necessaria por questées funcionais, como por exemplo acima de jane-
las com esquadrias, cujo empenamento comprometeria a utilizacéo,
podendo levar as vidragas & ruptura
1.7 Estruturas RETICULARES
As estruturas reticulares sao constituidas por elementos unidimensionais,
simplesmente denominados elementos ou barras, cujos comprimentos pre-
vvalecem em relagao as dimensées da seco transversal (largura e altura).
Na elaboracao dos modelos matematicos para analise, tais
estruturas sio idealizadas como constituidas por barras (ou elementos)
interconectadlas por nés, conforme ilustrado na Fig, 1.13.
Ay Darras (ou eum ale um,
tus) sav defiuides por um né
1né final. As barras podem ser de eixo xeto ou de cixo curvo e de segaio trans-
versal constante ou variével
(Oe nés que permitem rataria relativa de elementne a oles comer
tados so denominados nés articulados, e os que no permitem rotasao
relativa sio denominados nés rigidos. O angulo formado por elementos
interconectados por nés rigidos é 0 mesmo antes e depois da estrutura se
deformar. No né articulado a ocorréncia de rotacio relativa faz com que 0
Angulo na configuracao deformada seja diferente do originalmente definido
na configuragao indeformada
as
1 = Concertos
sear pisos) semynasg
Trelasespacal
TTD bigs plana
Porn
Portico espacial
7
conetanta pais
ides fou orpetraina place
arcades ee i
wiges
ost {ne planes
espaciais
Barras { planos
Fic. 1.13 Barras enés em estruturas reticulares
2.4 GRANDEZAS FUNDAMENTAIS
2a Forga
A forza é uma grandona votorial e portanto para
ser completamente caracterizada 6 necessério
camhacer’
© direcdo.
© sentido,
© intensidade,
© ponto de aplicagao.
As forcas representadas na Fig, 2.14
estao aplicadas em pontos distintos, tém mesma
diresao, sentidos opostos e intensidades diferen-
tes, sendo uma o dobro da outra.
No espaco, utilizando um sistema
de eixos ortogonais X, ¥ e Z, uma forga F fica
caracterizada por suas componentes F, Fy ¢
F,,conforme mdicado na Hg, 2.15.
© deslocamento associado a uma
forga € uma Lanslaydo ou deslocamento linear,
TATICA
CONCEITOS BASICOS DA Es
2.1.2 Momento
(O momento é também uma grandeza vetorial caracteri-
zada por (Fig. 2.2 A):
direco,
sentido,
intensidade,
ponto de aplicacao.
(© momento representa a tendencta de rora-
so, em torno de um ponto, provocada por uma forga.
No eapaso, wtilizando um sistema de cixoa
ortogonaie X, Ye Z, um momento M fica caracterieado
porsuac componenter Mi, Mf, eff, conformeindicada
na Fig 798
© deslocamento associado a um momento
Fic, 2.2 A) Momento M7 é uma rotacdo, ou deslocamento angular.
M— grandeza vetorial;
D) Represeutayau de,
um momento M no, sum ponto 0 é fungio da forca e da distancia, do ponto O ao ponto P de apli-
© momento M de uma forca F em relagio a
seonpases| seinjnns3
Spee M.+M; cacao da forca, sendo calculado por meio do produto vetorial (Fig, 2.3):
fe M-OBAF
sendo o. 0 angulo entre o vetor OP ea forca F’, o médu-
lode M é obtido como:
[it] = OB | |] sen
sendo a distancia entre a forga e 0 ponto 0 calculada
como:
4=[BB loon
ou simplesmente:
M-Fa
A.vtilizasdo da regra da mio dirsita, con-
Fic. 2.3 Momento M de
uma forga F em relacao
‘bum ponto 0. € 0 sentido de M sao obtidos pelo dedo polegar quando a palma da mao
direita € colocada voltada para 0 ponto O, estando o polegar pervendicu-
lar aos quatro dedos que apontam no sentido positivo de F, Observar, na
forme ilustrado na Fig, 2.3, é bastante itil. A direcao
Fig. 2.3, que M é perpendicular ao plano definido pelos vetores OP ¢ F.
Para auxiliar o estudante a compreender o conceito de momento,
citam-se a seguir dois entre os varios exemplos possiveis para ilustrar a sua
utilizasao.
‘Abrincadeira de gangorra aplica os conceitos de momento das for-
«a8 pesos dos meninos em torno do eixo O de apoio da gangorra, Conforme
ilustrado na Fig. 24s criangas desde cedo aprendem, por experimentagio, a
dependéncia do momento com as forcas pesos eas distancias. As Figs. 2.4A,
Be Cilustram situagées diversas na brincadeira de gangorta.
Fic, 2.44 brincadeira
Na primeira sitnacaa, os meninas astéo em equilibrie, numa de momentana
posicdo horizontal. gerando momentos idénticas em relacan a0 (pesns @ — BANBOTS
distancias iguais). Na segunda situacéo, os meninos tam-
bém tém pesos jguais, mas o momento gerado pelo menino
da direita é maior, pois é maiora distancia deste a0 ponto 0.
Na terceira situacao, 0 equilibrio na horizontal, associado a
iguais momentos, s6 é possivel porque 0 maior peso est a
uma distancia menor.
Para abrir uma porta é necesséri
trado na Fig. 2.5, a aplicacao de um momento em relagao ao
eixo da maraneta a fim de que esta, por ter a xotacio libe-
rada, gire fazendo a porta abrir. Fic. 2.5 Moniento aplicada em relagao 20
eixo da macaneta
2.2 Sistemas De Forcas
‘Um sistema de forgas ¢ umn coujunty de uua ou mais forcas e/ou momentos.
(Oo oub indices indicam © ponto de aplicagu das (uryas © aiuuestus
‘A.acdo de uma forca F sobre um ponto O, distante d do ponto P de
aplicagio da forca F, éa prépria forza F, aplicada em O, mais o momento M
de Fem relacan an pant 0 O momenta M gerade por F em relagio a0 ponte
O pode ser observado na Fig. 2.3.
‘Aagao de um momento M sobre um ponto O, distante d do ponto
P de aplicagao do momento M, £0 préprio momento M aplicado no ponto 0.
2.2.2 Redugo de sistemas de forcas a um ponto
Reduzir um sistema de forgas a um determinado ponto O 6, em outras pala-
‘vras, determinar a acao, em relacao ao ponto O, das forcas e momentos que
‘compéem o sistema,
A asio estética de um sistema de forcas no espaco, em relacéo
a.um dado ponto 0, é igual & aco estatica da resultante das forgas e a do
‘momento resultante em relacio ao ponto O.
2— Concerro: BASCOS DA EsTATICA
spopascs| seinjngsa
A seguir sao dados dois exemplos simples
Exercicio 2.1
Reducio do sistema de forcas indicado na Fig, 2.6, composto por duas for-
‘as, 20 ponto 0.
wenle Lem-se no ponte O:
atk,
M,-Oi ais O88,
A intended da forga reciltante am 06
Kerk
e considerando o sistema X-Y-Z. pode-se afirmar que F., €
‘uma forca na direcao Y, sentido positivo.
eens ‘Aintensidade do momento resultante em 0 6
fora composto de F M,=-F,d, +B,4,
ef, Neste exemplo, como F € d; s4o ambos menores que Fe da,
pode-se afirmar que My é um momento na dire¢ao Z, sentido positivo.
Exercicio 2.2
Redugio, ao ponto O, do sistema de forcas indicado na Fig. 2.7, composto por
‘uma forca F e um momento My.
Mo=Ointi+M,
Aintensidade da forca resultante em 0 €
B- F
podendo oe afirmar, om rela;30 a0 sistema X-V-Z, que Fy 6
suma forca na diracaa ¥, éentida negative
Eomomento resultante em 0 €
M, =-F,d, -M,
Frc. 2.7 Sistema de ‘o qual, em relacio a situacdo representada na Fig. 2.7, pode:
‘ose ‘composto de F -se afirmar que My ¢ um momento na direcio Z, sentido negativo.
2.3 Equitiario EstArico
2.3.1 Deslocamentos associados
Uma forca F quando aplicada a um corpo rigido impée a este uma tendén-
cia de deslocamento linear, ou translacio. Um momento Mi quando aplicado
a um corpo rigido impée a este uma tendéncia de
Quaono 2.11 Deslocamentos associados_deslocamento angular, ou rotagdo. O Quadro 2.1
AgAO DESLOCAMENTO ASSOCIADO sintetiza os deslocamentos associados.
Forca Translagao
Momento Rotacdo
23.2. Graus de liberdade
No espaco, utilizando um sistema de eixos referenciais, os vetores dos deslo-
‘camentos lineares (translacoes D) e os vetores dos deslocamentos angulares
(otagées 8) sao expressos por suas componentes nos 3 eixos ortogonais X,
¥, Z,as quais sio denominadas gras de liberdade e encontram-se indicadas
no Quadro 2.2.
Qualquer movimento de um ponto no espace _QUADRO 2.2 Graus de liberdade
su DESLOCAMENTOS ~=COMPONENTES
perfeitauente definide por
tes ou graus de liberdade (Fig. 2.84). Sao portanto scis os | Translagdo BB eB,
wey estes seis cupus
gros de liberdade de cada ponto, ou né, da cotrutura, ou _Rotacdo 6.5, 6,
da estrutura como um todo. Nas anélises planas fica-se
| veduside a 3 grans de lihordade (Fig, 2 BR)
t @ yi ® y Fic. 2.8 Componentes do movimento
i ” jz 2 dde um ponto: A) No espaco (modelos
7 tridimensionais: B) No plano X-Y
aE {& modelos bidimensionais)
t® B. & a
t oh eae eee
2 —Conceiros Basico On EstArica
Visando impedir a tendéncia de movimento imposta as estrutu-
ras pelos sistemas de forcas externas ativas, os seus seis graus de liberdade
precisam ser restringidos, possibilitando assim o equilibrio estaticu.
2.3.3 Apoios
A restrigio aoe movimentos de uma estrutura se dé por meio dos apoios ou
vinculos. Os apoios ou vinculos sio classificados em fungao da miimero de
_grans de Iihardade impedidas Nos apnins, nas directies ds deslacamentos
impedidos, surgem as forcas reativas ou reacbes de apoio.
2.3.4 EquacGes do equilibrio estatico
(© que impede que as estruturas se desloquem quando submetidas a forcas
ativas sAo os apoios, capaaes de gerar forcas reativas nas diregbes dos deslo-
camentos impedidos. Conforme indicado na Fig, 2.9, as forsas e momentos
reativos (reagées de apoio) formam coms forcas e momentos ativos (aplica~
dos 8 estrutura) um sistema de forcas (externas) em equilibrio. O equilibrio
das forcas emomentos do sistema, nas diregOes X, Y eZ, fornece, para wma
estrutura espacial, as seguintes equagdes do equilibrio estatico:
seagpyses| stnjnasa
26
Equilibrio de Forgas Equilibrio de Momentos
ZE=0
SE
Fic, 2.9 Equilibrio
Estitico
D3
t T
2.4, ESQUEMAS E SIMPLIFICACOES DE CALCULO
Afim de estabelecer um esquema de célculo, oumodelo matematico, algumas
simpl
cages tornam-se necessarias, as quais esto, em geral, associadas:
© A geometria: representacao da barra por meio do seu eixo;
ao sistema de forcas: forcas e momentos concentrados ¢ distribuidos;
e
© Aanilise numérica a ser efetuada: planas e espaciais;
.
A representacio dos apoios.
2.4.1 Simplificagoes geométricas
Com fui ditu, ay estruturas unidinmeusivuais, ou reuiculares, sav forma
das por clementos ou barras. A barra caracteriza-se por apresentar uma
dimensio, o comprimento, muito maior que as outras duas dimensdes.
Seqho wansversal
Centro de gravidede
Fic. 2.10 Representacio
geométrica de uma
barra
Goomatricamente obtém-co uma barra moven-
do-se uma figura plana ao longn dennma curva, Conforme
ilustradona Fig. 2.10, areta (ou curva) definida pelo centro
de gravidade da figura plana que se move € denominado
eixo da barra. A figura plana que tem o centro de gravi-
dade sobre o eixo e é perpendicular a este é denominada
se¢ao transversal. De forma simplificada, as barras serio
representadas pelo seu eixo.
2.4.2 Representacao das forcas aplicadas
(carregamentos)
‘As cargas em uma estrutura, conforme indicado no Quadro 2.3, podem ser
reais ou aproximadas, classificadas, quanto ao tipo, em forcas e momentos;
quanto a forma de aplicacao em concentradas e distribuidas por unidade
de comprimento e por unidade de Area, cujautilizacao, em esquemas estru-
‘turais tipicos, pode ser observada na Fig. 2.11.
Quavno 2.3 Cargas ou carregamentos em mouelus estruturais
Real
RepRESENTACAO
Aproximada
concentradas
Forgas tictnhuidac wniformes, triangulares, trapezoidais,
AS CARGAS PODEM SER outras
concenitrados
Momentos sitnbuidos
8
6
3
|
GH) core erie pore sobre as es ©) cages concenvadosem vig epores
cra
Carga srbuida concenteda,
porarea.a fl
{ I
ean oF —
i a
4 fu Fic. 2.11 Representacio
das forsas atuantes em uma
28
seonpisys| sumnsa
E importante que o engenheiro civil desenvolva, desde cedo,
a capacidade de simplificar célculos utilizando sempre o bom senso. Esta
habilidade ¢ exigida para a representac4o, nos modelos matematicos, dos
carregamentos reais atuantes nas estruturas. A Fig. 2.1 exemplifica bem
este aspecto, apresentando tres possivels formas de considerar a a¢ao dos
pneus de um carro sobre a laje de uma ponte. A representagao real tridimen-
sional é bastante complexa e a sua resolugdo demandaria esforyo © Lempo
bom maiores do que oo necesodrios cm solugées aproximadas. O nivel de
aproximacao mais conveniente depende do problema em andlice, levando-
“se em conta aspects tais cama tempo de racalusio @ pracisio numérica. A
Fig. 2.13 exemplifica a modelagem estrutural de um telhado.
3imensbes 2dimensées
el
Lea assum
rawr)
Fic. 2.12 Aproximagées sucessivas num problema lécaiww
Cargasaplicadas peas ergs
(Eequematingte para cSlvle do ua dae teseuras)
Reagio da parece
Peso prbpro + carga transmitida plas talhas
EERE
29
Quanto a precisto numérica das solugées na Engenharia Civil,
¢ importante salientar que nao faz sentido trabalhar com excessivos pre~
Giosismos matematicos, tendo em vistas as grandes incertezas associadas
a definicéo do proprio carregamento que atuard ao longo da vida itil da
estrutura.
Cargas em estruturas reticulares
Cargas concentradas
© wonceitu de carga concentrada (for¢a ou momento) é uma simplificagao
para efeity de edluullu, Quaudu una forya se distribul sobre uma area de
dimensdes pequenas, em comparacao com as dimensées da estrutura que
ce analica, esta 6 conciderada como uma forga concentrada,
Cargas distribuidas
Forcas € momentos podem também ser. de forma simplificada, cansidera-
dos como distribuidos ao longo de um comprimento, Neste caso. uma das
dimensdes da érea sobre a qual a forca se transfere é pequena quando com-
parada com a outra dimensio, Em projetos estruturais, as aces das lajes,
sobre as vigas sao exemplos de carregamentos distribuidos linearmente,
conforme pode ser observado na Fig, 2.11. Nas estruturas reticulares (cons-
tituida por elementos unidimensionais) as forcas ou momentos distribuidos
linearmente séo considerados ao longo dos eixos dos elementos (ow barras)
2. — Conecrros BAsicos 2A Estérica
que as constituem. Lajes que se engastem em vigas causam momentos dis-
tribufdos ao longo dos eixos destas.
Auunidade de forca distribuida ao longo de um determinado com-
primento €
fim
tunidade deforga | kN/m
Tunidade de comprimento | N/cm
eoutras
Annidade de momento distribuido a0 longo de um determinado
} ‘comprimento é
fem
senidade da momento _| 1ma/mm
Tnidade de compriments ) Nem/em
eoutras
Resultantes dos carregamentos distribuidos
A resultante de uma carga distribuida ao longo de um comprimento L,
expressa pela funcao q(x), 6 igual area delimitada pela funcio q(x) neste
t intervalo, ou seja
Refi q@dde
sendo 0 ponto de aplicacao da resultante R coincidente com o centro de gra-
vidade do diagrama de q(x).
A seguir sao indicados, para modelos planos, os carregamentos
distribuidos mais utilizados na pratica com as suas resultantes e 05 seus
pontos de aplicacao.
(CARREGAMENTO DISTRIBUIDO. RESULTANTES
[ Ea fit
Uniforme
Triangular tec A ag
seangyscs| seinjnas3
Trapezoidal 4 4
splicada no C6. do diagram de is)
“a
a
Qualquer R
c
Sapo
2.43 Simplificagées analiticas
Em funcéo de determinadas caracteristicas das estrnturas é possivel, em
muitas situacbes, simplificar 0 modelo matemético a ser analisado. Por
exemplo, uma estrutura geometricamente plana, em que atuem somen-
te forcas contidas no plano da estrutura, pode ser analisada considerando
somente as ditecoes de deslocamentos diretamente envolvidas na anilise
Seja. um Modelo Estrutural Plano, com a estrutura contida no plano XY.
Uma vez assegurado 0 equilibrio nas outras direcbes de deslocamento, as
direcdes de deslocamento a serem consideradas numa andlise matematica
simplificada sdo, conforme representado na Fig, 2.8B (p. 25):
© Translagao em X,
© Translagio em Y,
33
© Rotagao em torno de Z.
As vigas, os pérticos planos ¢ as treligas planas s4o casos par-
ticulares do modelo de portico espacial, onde somente estas diregées de
deslocamentos esto sendo consideradas na anilise.
Numa modelagem plana, com a estrutura no plano A-¥, 0 e1x0 %
nao é representado e os momentos (e rotag0es) a ele associados sao represen-
tados por setas curvas (Fig. 2.14C) no proprio plano X-¥.
2.4.4 Representacao dos apoios
‘A Fig. 2.14 apresenta, para or modelor eetruturaie planoe do vigae, pérti-
0s e treligas, os apoios associados a estas directies de deslocamento as,
formas simplificadas de representi-los graficamente nos modelos matems-
ticos, Importante observar que os apoios representados nesta figura podem
formar qualquer angulo com a horizontal. Estes apoios sao classifcados, em,
fungao do nimero de deslocamentos impedidos,e
© Apoio simples (do primeiro género ou “chatriot”)
= Impede a translac4o em uma das diregdes.
* Permite a translacao na direcdo perpendicular a impedida.
™ Permite a rotagio (em torno de 2).
© Rotula (apoio do segundo género ou articula¢ao):
TCS BASICOE DA EsTANICA
Cons
Impede as translagées nas duas direcées (K e Y).
® Permite a rotagio (em torno de Z).
‘© Engaste (ou apoio do terceiro género):
Impede as translacbes nas duas direcoes (X e ¥).
Impede a rotagao (em torn de 2).
) Apso simples (do primelo géneroou'tharit")
Ff
Rétul (apoio do segundo género ouaticulagéo)
ISIS
© rane on sco do tee sce
LU
Engaste v
Fic. 2.14 Representacio dos apoios em Modelos
Plance de Reteuturse
secppises) suming
Esquema de cleulo
2.4.5 Idealizacao de um modelo
Saber representar © interpretar os esquemas grificos associados aos
modelos a serem analisados matematicamente é fundamental na Anélise
Estrutural. é
A seguir sera descrita a idealizacao de um
esquema de célculo que permita a andlise da viga AB
de sustentagao do peso P representada na Fig. 2.15A.
‘Como 0 comprimento do olhal, por meio do qual se da
# Wansferéncia do peso P para a viga, ¢ pequeno quando
compatadly un v Couiprimento total da barra, 0 peso
P pode ser considerado como uia urea concentrada. O
eequema de eéleulo obtido encontia'se repreventady na
Rig 2.15B. Ropare que a agdo do tirante BC sobre a viga
® AB é a forca externa reativa Va
Visas agin 5 aattee ac east
whe
Fic. 2.15 A) Desenho
da cotrutura real; B)
‘Modelo da viga AB; C)
Modelo da estrutura
ABC
composta pela viga AB e pelo tirante RC, a novo
esquema de célculo obtido passa a ser 0 indicado na
ig. 2.15C. Uma comparacao com o modelo anterior per-
mite abordar aspectos associados & substruturacao e as
diferensas, em fungao do modelo adotado, entre esfor-
{08 internos e externos. No primeira modelo, a aco do
tirante BC sobre a viga AB é representada pela forca rea-
tiva, a qual neste caso é externa a viga AB, objeto da andlise. J no segundo
modelo, esta acio se dé através de esforcos internos, uma vez que o objetivo
desta andlise é a estrutura ABC.
2.5 Reacoes pe Arcio
‘Uma vee conhecidos os apoios em uma estrutura submetida a um sistema
de forsas, as reasdec de apoio podem ser calculadas. As reagbes de apoio
S40 forgas ou momentos, com pontoo de aplicagdo ¢ direydu cwuliecidus &
de intensidades ¢ sentidos tais que equilibrem o cistema de forsas ativas
aplicado a estrutura. Os sistemas de farcas externas, formadoe pelas forcas
ativas e reativas, tém que estar em equilihria,
2.5.1 Viga biapoiada
Para a viga biapoiada da Fig. 2.16 A, calcular as reagées de apoio.
Para determinar as reagbes de apoio deve-se:
- Adotar, como indicado na Fig. 2.168, um sistema de eixos ortogonais
X-¥2Z (com Z nao representado)
Indicar, nos apoios da estrutura, as forcas reativas que estes introdu-
zem, arbitrando seus sentidos (Fig. 2.160).
TT
33
(A) Esquems simpliicado (©) Reacbes de avoio ~ sentidas arhitrarine
ne
a es
—
4 a
(© Sistema reerencial x-¥-2 (© Reacbes de apoio
nae ny
4 2 Sty an se
TTD wa
Cape eal be ea
Fic, 2.16 Viga biapoiada 5
Da sneha eschew apne apa 5
estitico: 7
@ ER =0 2. Hy+5=0 +. Hye-Stf &
@) ZB. = 0. Va-12+Va=0-. Vat Vi 3
@) XMa=0 2. Va-12 2+ Vk X8=0- Va e
De(a) vem: —Va=12-Vp -. Va=Stf &
|
O sinal negativo na forga Hy indica que o sentido correto é con-
trério aquele arbitrado, O sistema de forcas externas, em equilibrio, pode
finalmente ser observado na Fig, 2.16D.
2.5.2 Portico plano
Para v portico plano da Fig. 2.17A, determmar as reagées de
pene:
> Stara een X.2¢endos
Esquea sinliteado (Cp Cee
y
i wt I
256480m 204N ae 256K
Fic, 2.47 Dértico plane
seaqeases| sunjnnsy,
a4
© Equacdes de equilibrio escritas para o modelo matematico representado
na Fig. 2.17B:
@ DF, =0 2 Hy+ 60=0 2% Hy=-60KN
@ Diy =0 2. Va- 40+ Vp=0 2. Vat Vp= a0
IM, =0 ©. 256-40 x5-60x 8+ Vsx8=0.
3 56 +200 + 486
2
+53 +. Vas —13kN
53kN
Ve:
Deo (2) ver: Va=
Os sinais negativos, obtidos para as forcas reativas Hy © Va,
informam que os sentidos s4o contrarios Aqueles arhitradas, sendn a
sistema de forcas externas (ativas ¢ reativas) em equilibrio aquele repre-
sentado na Fig. 2.17C.
2.53 Célculo das reag6es de apoio para
carregamentos distribuidos
@ = Uniforme total:
‘ { IB,=0 + Vat Vaz ab
SE,
Vat Ve~ ql
EMa= 02. -qhth+#) +Vab=
L
ahih+) ght
TL ae
© Triangular total:
~ab ab _3ab-2al ol
23 6 6
Pi oat Aaa
@ ‘Triangular parcial:
Es
L
2 Va Sh + Ve20
paar
My s0 «22, +22)o Vob=
a
wale yeh
\ NaF or te
‘
i me Wa Se Be
2
rear ty
© Trapezoidal:
:Va-aul—(@z-a)- + Va=0
L E 2b » Vpeaul pL
we Eq gy & 2h vp —0 ». Veadib + (qe-
ah 5 -@-w 5X ‘e-ad &
2— Concertos Basicosa Estarca
© Axial uniforme (p() = p = constante):
la
2.5.4. Célculo das reagoes de apoio para momentos
cunceriliados
Observar que as forcas reativas formam o binario que equilibra o momento
aplicado M e que v Lindsiu das [urgas reativas sera sempre o mesmo, inde-
pendente da posi¢ao de aplicacéo do momento.
XE) =O. Vat Va=0
02. M+Vab=0 «.Ve-—M
2
Exercicio 2.3
Caleular as reagdes de apoio da viga biapoiada da
Fig. 2.18A:
Escolher o sistema de eixos referencias
Introduzir as torcas reativas arbitrando sentidos.
Para a determinacao das reagdes de apoio trabalha-se com
as resullantes dos carregamentos distribuidos.
Para a carga Lriangular tem-se: Ry= 3 x 6/2=9tf
aplicada a 2m de A.
Reoultante da carga uniform. Rp=2x6=12U0
aplicada no meio do vio, isto é,a3 mde A.
Fic. 2.18 A) Exercicio proposto: [Se
B) Sistema equivalente para céleulo Ha=0
das veaghee de apoio,
TT
37
=r, -'
EM,
-Vq~9-12+ Vg =0 Vy tg =21
9x2 ~12x3+18+ Vp x6=0 -.Vp=6tf
V4 =21-Vp.Vq ~ 15t6
2.6 ESTATICIDADE £ ESTABILIDADE DE MopeLos PLANOS
Os conceitos de estabilidade e de estaticidade devem ser estudados simul-
taneamente.
Quauty a establlidade as estruturas podem ser classiticadas
© Retavoie: quando o sistema de foryas teativas for capac de equilbrar
qualquer sistema de forgae ativaa, Pave tal as foryas teativas uu putleit
formar sistemas de forcas paralelas ou concorrentes
© Instaveis: quando as forcas reativas forem am numero incuficiente, ou
formarem um sistema de forcas paralelas Gncapas de equilibrar forgae
erpendiculares a elas) ou concorrentes (incapaz de equilibrar momen-
tos).
Quanto a estaticidade as estruturas podem ser classificadas
como hipostaticas (sempre instaveis), isostéticas ou hiperestaticas (estas
duas Ultimas sempre estaveis)
2. — Concertos 34s1¢05 ba Escarica
2.6.1 Estruturas externamente isostaticas
‘Quando 08 apoios de uma estrutura, em equilibrio estavel, sdo em nimero
estritamente necessério para impedir todos os seus possiveis movimentos
tem-se uma estrutura externamente isostética
Neste vaso, conforme ilustrado na lg. 21Y, ondmero ?
de reacées de apoio « serem determinadas € igual 20 f / ae
niimero de equagées de equilibrio dispuniveis. 4 =
we
Entretanto, as cstruturas represeutatlas
na Fig, 2.20, por nao terem eatisfeitas a condigao {7
imprescindivel da estabilidade, so. classificadae X tx
simplesmente quanto A estahilidarte cama inetaveie, \
sendo aceito por alguns autores a sua classificaréo, (4) 5p, 9
quanto estaticidade, como estruturaextemamente (4) 55-9 eee es
G) IMa-0
2.6.2. Estruturas externamente Fie, 2.49 Eetrutures
hiperestaticas cexternamente
ioetsticao
Quando 08 apoios de uma estrutura, em equilibrio estvel, sdo em nime-
x0 superior ao estritamente necessério para impedir seu movimento a
38
SeonB}05) semjnsy
Embora o n*de equacées equil
de apoio, estas esrurUras nao estio.
Fic. 2.20 Estruturas
instiveis
r..e: t
Waa sep
@) EB=0 (Ne de equacoes de equilibrio <
(2) ZR,=0 | Node reacdes ano
*
G) EM, eauilbrio
Fru 2.21 Bstrutura
externamente
hiperestatica te
Fic, 2.22 Estruturas
‘externamente hiperestiticas,
fe respectivas equacées
e compatibilidade de
deformagses
Nee equayies equilionio >
Nede reacées apoio
Fic, 2.23 Bstruturas
externaimente hipostaticas e
instaveis
=e de reagées
‘em equilbrio,
estrutura, quanto 4 ectaticidade, é classificalla eumne
externamente hiperestatica. Neste caso, conforme
ilustrado na Fig, 2.21, 0 mimero de reagdes de apoio
(incognitas) a serem determinadas 4 snperior ac
niimero de equacées de equilibrio disponiveis. Nest2
forma, € necesséria a obtencio de outras equacées
além das de equilibrio, a fim de tornar o problema
matematicamente possivel, isto é, n incégnitas com
nequagdes.
As (n-3) equacdes necessérias para 2
solugao do problema plano hiperestatico sao obti-
Jas von base na compatibilidade de deformacées,
sendo, purtanto denominadas equagées de com.
Patibilidade de deformacses, Alguns exemplos
de ortruturas extexuamuente hiperestaticas com as
respertivae equagdcs de wuipacibilidade de defor-
‘mages san dados na Fig. 2.22,
6
* OF = OF + OR=0
Wit
Ona
IMa=0
Eauracda da compatibtidade de Uefomagoes + equacées de equiv.
6.3. Estruturas exlernamente hipostaticas
Quando o nimeru de apoios (ou vinculos) é insuficiente
para estabelecer 0 equilibrio, a estrutura é dlassificada,
amanto 3 eetaticidade, cum externamente hipostética,
Neste caso, a estrutura é sempre instdvel e o mimero de
equagdes de equiltbrio estatico é superior ao nimero de
reacées, Exemplos de estruturas hipostéticas instaveis
podem ser observados na Fig 2.3,
2.6.4 Estruturas reais
Ao Engenheiro Civil somente interessam as estruturas
estaveis, portanto, as isostéticas ¢ as hiperestaticae
‘A grande maioria das estruturas é hiperestatica. Este curso inicia com 0
‘estudo das estruturas isostaticas, também conhecidas como estruturas
estaticamente determinadas, uma vez que para serem analisadas basta
aplicar as equacoes do equilibrio estatico.
© Quadro 2.4 sintertza estas informayoes.
| Quaoko 2.4 Resumo
Isostiticas (estaticamente determinacas)
As estruturas reais 0: restiticas (estaticamente indeterminadas)
» SRO EFy-0 EF =0
Estruturas espaciais
YM.20 EM,=0 IM,
5
6
3
a
3
i
(© objetivo da Andlise Estrutural 6 a determi-
aco das reaches de apoia e das esforcos soli-
itantes internos. © conhecimento das reacdes
de apoio, no caso das estruturas isostéticas,
permite a determinagéo do comportamento
interno da estrutura.
‘A interagao de um corpo com os que o
odeiam e que se encontram fora dos seus limites
se caracteriza pelas forgas externas. O conjunto
das forcas externas ¢ constituido pelas forcas
aplicadas, ditas forcas ativas, e pelas forcas rea~
tivas. As forcas externas podem ser de superficie,
quando ha 0 contato direto entre os corpos, e de
volume, quando nao ha o contato direto entre os
corpos (agao remota). Embora as forgas de volume
jam sobre cada particula que compée o corpo elas
ako geralmente representadas por forgas concen
tradas ou distribuidas por linha ou por superficie
‘Aagao da gravidade sobre os corpos, denominada
peso préprin, 6 uma farca de-unlime, considerada,
muitas vezes, concentrada no centro de gravi-
dade. O equilibrio exige que estas forcas externas
formem um sistema em equilibrio. Lembrar que
as primeiras incégnitas a serem calculadas, isto
as forcas reativas, sdo determinadas através das
equacdes de equilibrio.
A interagao entre as partes do corpo
que est sendo analisado se da através das forcas
internas. Estas forcas internas surgem entre
todas as segdes contiguas de um corpo subme-
tido a agao de um sistema de forgas externas.
ESFORGOS SOLICITANTES INTERNOS
seogpysesy senyniysy
Fic. 34 A) Corpo
submetido a um zi
sistema de forcas y)
extarnae om equilibrio;
B) Tensées internas em
‘uma secdo genérica $
Seja um corpo submetido a um sistema de forcas externas em
equilfbrio, conforme ilustrado na Fig. 3.1A. Imaginando este corpo seccio-
nado em duas partes na se¢do S, como indica a Fig. 3.18, vé-se a necessidade
de introduzir um sistema de forcas internasa fim de manter 0 equilibrio das,
duas partes do corpo: a esquerda e a diretta da secao S. Observar que estas
forgas intermas variam dependendo da posigdo da seo S.As furgas internas
correspondem a interagao entre as particulas do sélido que se encontram
no dois ladoo da cogo imagindtia S. Segundo o principio da acto e reagao
estas forcas sao sempre reciprocas (iguais diregées, intensidades e ponto de
aplicacao, mas com sentidns apostns). A parte direita da rarpa age sabre a
parte esquerda e vice-versa, de tal forma que as forcas que aparecem em
ambos os lados formam também um sistema de forcas, desta vez internas.
‘em equilibrio, conforme ilustrado na Fig. 3.1B. Pode-se ainda afirmar que
as forcas internas distribuem-se na segao de tal forma que as superficies
deformadas da seco $ coincidam ao se unirem as duas partes (lembrar que
a seco S 6 imaginaria € que a pera se mantém integra). Esta condigao €
denominada de condicao de compatibilidade das deformacoes e est asso-
ciada a continuidade da estrutura, peca ou elemento.
z z, Se8oS 5g Zz
ye Fp F
A distribuigao das forcas internas no plano da secao S se da
através das tensées, conforme ilustrado na Fig, 3.1B. Sendo as estruturas
unidimensionais representadas somente através de seus eixos, a repre-
sentagio dos esforgos internos deve ser feita através das resultantes das
tensdes reteridas a estes eixos. A resultante destas tensdes encontra-se
representada na Fig. 3.2. Reduzindo-se ao centro de gravidade da secao
obtem-se a resultante das forcas e o momento resultante, representados na
a
Fig. 3.3 para a parte da estrutura a esquerda de S. Considerando, conforme
indicado na Fig. 3.4, 0 sistema de eixos ortogonais local em que o eixo
x coincide com o eixo da barra e y positive para cima, podemos obter as
3 componentes da resultante das forcas R: R ,, Ry eR.,; eas 3 componentes
domomentoresultante Mt: i, Me
,-Aestas componentes denominamos
Esforcos Solicitantes Internos na se¢ao $, muitas vezes aqui referenciados
simplesmente por ESI.
Fic. 3.2 Visualizagao
a repultaute das
tenses internas em
uma seco genévica $
Os seis esforgosinternos que surgem nos porticosespaciais podem
ser observados na Fig. 3.4. A componente da forca R segundo o eixo dos x
denomina-se esforgo normal e representa-se por N. As componentes de R
— Esroxcos SoLicITanTes INTERNOS
segundo os eixos y ez sao 0s esforcos cortantes Q, ¢ Q,, respectivamente. A
componente do momento M segundo o eixo xdenomina-semomento de tor-
[40 (ou momento torgor) ¢ representa-se por 1; sendo também referenciado
na literatura por M,, M, ou Mr. As componentes do momento M segundo os
eixos y e 2 840 os momentos fletores M, e M,, respectivamente.
Fic. 3.3 Resultante referida ao CG da segio Fic. 3.4 Bsforcos Solicitantes Internos (ESI) na
zgentrica $:B 0 momento Mt segdo S de uma eetrutura eepacial
Os ESI sao sempre referenciados aos sistemas locais dos elemen-
tos que compéem as estruturas. Um elemento k, definido pelo né inicial ie
pelo né final j, tem um sistema local com a origem no né inicial ie 0 eixo x
coincidente com o eixo do elemento. Quanto aos sinais dos ESI, entretanto,
deve-se observar que estes seguem uma Convengao de Sinais especifica~
mente aplicavel aos ESI.
© Quadro 3.1 indica de forma resumida:
(8 sets ESI das estruturas espaciais,
a Convengao de Sinais,
08 Tipos de Solicitacoes,
09 Tipos de Deformagiea ©
forma como os BSI devem ser marcados, nos respectivos diagramas,
‘om ralazio 20 aio local x (eempre coincidente com o cixo do elemento)
Quaoro 3.1 Esforcos Solicitantes Internas (FSD
ESI CONVENCAO DE TIPODE _ DEFORMACAO—DIAGRAMA
SINAIS SOLICITACKO
N,
Normal oe A ‘Alongamento
0 Lan. be Eben
N go r Compresio Encurtamento
af Ohees"
y
Cortante Q CBalhamento
svoapyses] Sunjngs3
Deslizamenta
QeQ) oy od { relativo das secoes
LiTe,,
Ms Muy ctaionaseeaes
Nomerto j8AC EL) foto as sete
transversais em
Fletor M Flex
otto toro de eixos nos
ove a) seus planos
Momento de
TorcaoT
(My, My ow
™)
Rotacao relativa das
paseo segoes transversais
3.4. Estorcos INTERNOS Em EsTRUTURAS PLANAS
Na Anélise Estrutural, uma estrutura ¢ dita plana quando tanto ela quan:
to as forcas que nela atuam pertencem a um mesmo plano. Desta forma a
estrutura pode ser analisada segundo um modelo plano.
Considerando uma estrutura contida no plano x-y, as direcdes de
deslocamento de interesse nas anélises so Dy, Dy, 0p. Neste caso, sio trés
08 esforcos solicitantes internos de interesse em qualquer seco $ da estru-
ura:
SS
4%
© normal (ou axial): N, ou simplesmente N i
© cortante: Q, ou simplesmente Q 4
© momento fletor M, ou simplesmente M
Na Fig. 3.5A so indicadas duas > iy
formas distintas utilizadas para representar had
os ESI em uma secao S: seja através da Secio,
seja através do Elemento infinitesimal contendo O
‘S.A representacao atraves do elemento em 9 sera Tides
aqui empregada por ser a mais concisa. A Fig. 3.58
seo, Elemento em
indica os sentides positivos des esforyos
rma, cortantesemnomentos etre. srl =} nef pen
‘Analiear uma eotrutura atravée de Tore en ov normal poative
nm modela plana 4 também uma simplifica- cea / 4
ao de calculo, Na estrutura real, as direcdes ML \ | of Ofte
de deslocamentos nao consideradas no modelo ze
matematico plano (D>, Oye Oy, para estruturas
no plano X-¥) devem ter também as suas con- ») im C 7 C u ) io
digbes de equilibrio asseguradas. Momento ftorpostvo
Conhecendo-se as forcas externas
Fic, 3.5.8) Dois modos
(Forgas aplicadas ¢ reacbes de apoio) os esforcos
Jaortrrcr—rr—o—>rer—rrsrsavers de representar
solicitantesinternosN, QeM, em qualquer secao transversal, podem ser deter- Seco ou Elemento; B)
minados. Os ESI dependem da posicao da seyao transversal S considerada. Representacao de N,
‘As varlagBes dos ESI, no caso das estruturas planas N, Qe M, a0 OM sesundo or dois
longo dos elementos que compSem uma estrutura so representadas grafica-
‘mente por meio des Diagramas ou Linhas de Estado dos:
© esforcos normais:identifcados simplficadamente por N, DN ou DEN;
© esforgos cortantes:Identifcados simplifcadamente por Q, DQ ou DEQ:
1© momentos fetres:dentifcados simplificadamente por M, DM oa DMF.
3 Esrorcos Sovicrranres INTERWOS
3.2 CALCULO DOS EsrORGOS INTERNOS EAN UMMA
Seco S
Conihecidas todas as forcas externas, a determinacao dos ESI pode ser feita
por meio de um dos seguintes raciocini
1. Considerando a acao das forcas a direita ou a esquerda de S
Permite 0 célculo dos ESI por meio da determinagio da aco do sistema de
forgas a esquerda ou a direita de S sobre a seco ou ponto (sobre o eixc) S.
2. Considerando o equilibrio das partes & esquerda ou a direita de S
Permite a determinacao dos ESI por meio da aplicacao das equacoes de
equilibrio seja a parte a esquerda de $ ou a partea direita de.
primeiro raciocinio 6 0 mais direto e rapido, sendo, portanto,
o.utilizado neste curso,
2
g
Exercicio 3.1
A Fig. 3.6 além de enunciar o exercicio a seguir, visando a determinacao dos
‘esforcos internos nas secées S; e Sz, ilustra a elaboracio do esquema de cil
culo e faz a distingéo entre secdes S simples, tais comoa S; onde nao existem
descontinuidades, e as segdes S especiais tais como a S, onde, por causa das
descontinuidades, duas secdes tém que ser consideradas. Na secao S; esto
aplicadas duas forcas concentradas: uma de intensidade 3P vertical e uma
horizontal, de mtensidade 2, aplicada no eixo da viga.
Fio, 3.6 Exemplo para determinagao dos ESI nas secoes. A) Exercicio proposto; b) Modelo matematico; C) $, —
luma tinica seco; D) S> duas segdes: $3 (imediatamente anterior &s forcas concentradas) e Sf (imediatamente
posterior 3s forcas concentradas)
Caleulo das Reacfes de Apo
* Definicao de um sistema de eizas
* Introducio das reagdes de apoio, das quais sto conhecidas as dire-
6865, 05 pontos de aplicacao e os sentidos sa0 arbitrados.
* Cileulo das reagées através das equagées do equilibrio estético.
@) BB 0-, Hat 2P <0 2. Ha= 2P
0% Va~3P+Vp= 02. Vas Vi
=0 1. -BPX2a+Vpx3a=0 2. Vp=S8,
3P-Vo= 3P-2P «V,
S-ar putea să vă placă și
- Treinamento PCM Versão 2013 - V4Document241 paginiTreinamento PCM Versão 2013 - V4Juliana Marotta Rodrigues100% (1)
- Exercicios Resolvidos de Trocadores de CalorDocument12 paginiExercicios Resolvidos de Trocadores de CalorJuliana Marotta RodriguesÎncă nu există evaluări
- Calculo RedutorDocument25 paginiCalculo Redutorksr_taubate83% (6)
- Flamínio Levy Neto e Luiz Claudio Pardini - Compósitos Estruturais PDFDocument99 paginiFlamínio Levy Neto e Luiz Claudio Pardini - Compósitos Estruturais PDFLeonardo Alves100% (3)
- Lista de ExamesDocument5 paginiLista de ExamesJuliana Marotta RodriguesÎncă nu există evaluări