S-ar putea să vă placă și
- Transformation of Axes (Geometry) Mathematics Question BankDe la EverandTransformation of Axes (Geometry) Mathematics Question BankEvaluare: 3 din 5 stele3/5 (1)
- Module 7: Discrete State Space Models: Lecture Note 2Document7 paginiModule 7: Discrete State Space Models: Lecture Note 2venkat mandaÎncă nu există evaluări
- Solution Set 8Document7 paginiSolution Set 8Abdul AlsomaliÎncă nu există evaluări
- Assignment 2Document3 paginiAssignment 2phatctÎncă nu există evaluări
- Statefb AbiramDocument29 paginiStatefb Abiramumairnaeem_90Încă nu există evaluări
- Z04 Fran5717 08 Se WDDocument4 paginiZ04 Fran5717 08 Se WDRick FlairÎncă nu există evaluări
- EE554 Chapter 5 State Feedback ControlDocument27 paginiEE554 Chapter 5 State Feedback ControlAbdullah AloglaÎncă nu există evaluări
- Controllability and ObservabilityDocument23 paginiControllability and ObservabilityJhon CerónÎncă nu există evaluări
- Review: Today's TopicDocument29 paginiReview: Today's TopicArmando MaloneÎncă nu există evaluări
- DiscreteTime MPC (2021)Document20 paginiDiscreteTime MPC (2021)Kamgang BlaiseÎncă nu există evaluări
- Ee263 Ps1 SolDocument11 paginiEe263 Ps1 SolMorokot AngelaÎncă nu există evaluări
- Exercise 6: Probability and Random Processes For Signals and SystemsDocument2 paginiExercise 6: Probability and Random Processes For Signals and SystemsGpÎncă nu există evaluări
- Advanced Digital Control Syst EE554: Discrete Time SystemsDocument41 paginiAdvanced Digital Control Syst EE554: Discrete Time SystemsAbdullah AloglaÎncă nu există evaluări
- Rr411007 Digital Control SystemsDocument1 paginăRr411007 Digital Control SystemssivabharathamurthyÎncă nu există evaluări
- A5405-Digital Control SystemsDocument2 paginiA5405-Digital Control Systemshari0118Încă nu există evaluări
- EC744 Lecture Note 5 Applications of Deterministic DP: Prof. Jianjun MiaoDocument23 paginiEC744 Lecture Note 5 Applications of Deterministic DP: Prof. Jianjun MiaobinicleÎncă nu există evaluări
- Lecture 3: System RepresentationDocument16 paginiLecture 3: System RepresentationmumtazÎncă nu există evaluări
- Rr411005 Digital Control SystemsDocument8 paginiRr411005 Digital Control SystemsSrinivasa Rao GÎncă nu există evaluări
- Digital Control Kannan M. Moudgalya, Autumn 2007Document20 paginiDigital Control Kannan M. Moudgalya, Autumn 2007Ravinder RangaÎncă nu există evaluări
- Ex 3 ProblDocument2 paginiEx 3 Problfb402Încă nu există evaluări
- MAT 461/561: 5.1 Stationary Iterative MethodsDocument4 paginiMAT 461/561: 5.1 Stationary Iterative MethodsDebisaÎncă nu există evaluări
- Unit 10 Discrete State Controller and Controller - Estimator (DCE) Design Using Pole Placement, Observer-Estimation 20XXDocument60 paginiUnit 10 Discrete State Controller and Controller - Estimator (DCE) Design Using Pole Placement, Observer-Estimation 20XXJeff BobÎncă nu există evaluări
- Assignment 1 (ELE8306 - 21)Document5 paginiAssignment 1 (ELE8306 - 21)umarsaboÎncă nu există evaluări
- Some Past Exam Problems in Control Systems - Part 2Document5 paginiSome Past Exam Problems in Control Systems - Part 2vigneshÎncă nu există evaluări
- Full State Feedback ControlDocument8 paginiFull State Feedback ControlGabriel RodriguesÎncă nu există evaluări
- K XK XK X K XK Yk Yk Ykn Ykn: 7.9 State-Space Realizations 7.9.a Controllable Canonical RealizationDocument9 paginiK XK XK X K XK Yk Yk Ykn Ykn: 7.9 State-Space Realizations 7.9.a Controllable Canonical RealizationSayali LomateÎncă nu există evaluări
- Ps8sol 6245 2004Document6 paginiPs8sol 6245 2004Tejas PatilÎncă nu există evaluări
- 05 MixedPrecisionsSolversDocument28 pagini05 MixedPrecisionsSolverssusma sapkotaÎncă nu există evaluări
- CH 4Document26 paginiCH 4Keneni AlemayehuÎncă nu există evaluări
- Math 273 - Exploration 9.5 (Final)Document10 paginiMath 273 - Exploration 9.5 (Final)Mohit HajarnisÎncă nu există evaluări
- Lec 4Document10 paginiLec 4Breno Cesar Mattos Cruz TrindadeÎncă nu există evaluări
- NPTEL Numerical Optimization MethodsDocument42 paginiNPTEL Numerical Optimization Methodsarvind kumarÎncă nu există evaluări
- Model Predictive Control Examples Sheet: k+1 K K K KDocument8 paginiModel Predictive Control Examples Sheet: k+1 K K K KPierre Narcisse MASSOMA BILLEÎncă nu există evaluări
- Workshop6 SolutionsDocument3 paginiWorkshop6 SolutionsforspamreceivalÎncă nu există evaluări
- Field Exam - ControlsDocument1 paginăField Exam - ControlsVigneshRamakrishnanÎncă nu există evaluări
- Closed Loop Properties of MPCDocument18 paginiClosed Loop Properties of MPCShaheer DurraniÎncă nu există evaluări
- Abstract. We Extend The Applicability of The Kantorovich Theorem (KT) ForDocument8 paginiAbstract. We Extend The Applicability of The Kantorovich Theorem (KT) ForPaco DamianÎncă nu există evaluări
- Introduction to Optimal Control and the Linear Quadratic Regulator (LQRDocument5 paginiIntroduction to Optimal Control and the Linear Quadratic Regulator (LQRkosuÎncă nu există evaluări
- CY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsDocument25 paginiCY4A2 Advanced System Identification Lecture 7: The Kalman Filter (less than 40 charsChristian OkregheÎncă nu există evaluări
- Nlpsol 4Document7 paginiNlpsol 4AfshinÎncă nu există evaluări
- ch4 KFderivDocument22 paginich4 KFderivaleksandarpmauÎncă nu există evaluări
- Inno2024 Emt4203 Control II Notes r5Document63 paginiInno2024 Emt4203 Control II Notes r5kabuej3Încă nu există evaluări
- ADMMDocument34 paginiADMMShuhan QiuÎncă nu există evaluări
- :: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackDocument7 pagini:: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackmohamed samierÎncă nu există evaluări
- Discrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControlDocument8 paginiDiscrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControldanyetnÎncă nu există evaluări
- 5.3+ +Recursive+Least+Squares+EstimationDocument3 pagini5.3+ +Recursive+Least+Squares+EstimationAbhishek KumarÎncă nu există evaluări
- Ariel Baron March 27th 2020Document3 paginiAriel Baron March 27th 2020Ariel BaronÎncă nu există evaluări
- Unscented KF Using Agumeted State in The Presence of Additive NoiseDocument4 paginiUnscented KF Using Agumeted State in The Presence of Additive NoiseJang-Seong ParkÎncă nu există evaluări
- Lect 11Document12 paginiLect 11TusharÎncă nu există evaluări
- Lecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayDocument3 paginiLecture Summary: Markov Jump Linear Systems: Vijay Gupta and Richard M. MurrayParfumerie Actu'ElleÎncă nu există evaluări
- State-space control system designDocument15 paginiState-space control system designTalha YasinÎncă nu există evaluări
- Advanced Digital Control Syst EE554: Controllability and Observability of Digital Linear SystemsDocument28 paginiAdvanced Digital Control Syst EE554: Controllability and Observability of Digital Linear SystemsAbdullah AloglaÎncă nu există evaluări
- Root locus analysis and stability of proportional-integral control systemsDocument4 paginiRoot locus analysis and stability of proportional-integral control systemsSerkan KaradağÎncă nu există evaluări
- Kalman Filter For Estimating Tank OutflowDocument7 paginiKalman Filter For Estimating Tank OutflowGoran MiljkovicÎncă nu există evaluări
- KalmanDocument34 paginiKalmanbilal309Încă nu există evaluări
- DR Lee Peng Hin: EE6203 Computer Control Systems 165 DR Lee Peng Hin: EE6203 Computer Control Systems 166Document33 paginiDR Lee Peng Hin: EE6203 Computer Control Systems 165 DR Lee Peng Hin: EE6203 Computer Control Systems 166phatctÎncă nu există evaluări
- The DC Power Flow EquationsDocument22 paginiThe DC Power Flow EquationsPeter JumreÎncă nu există evaluări
- 2 3 KalmanDecomposition SlidesDocument31 pagini2 3 KalmanDecomposition SlidesSree RenjanaÎncă nu există evaluări
- Lecture 13Document7 paginiLecture 13EdutamÎncă nu există evaluări
- Для Просмотра Статьи Разгадайте КапчуDocument6 paginiДля Просмотра Статьи Разгадайте КапчуNor Rochmad Hadi PÎncă nu există evaluări
- A Low-Cost Educational Platform For Swarm RoboticsDocument15 paginiA Low-Cost Educational Platform For Swarm RoboticsNor Rochmad Hadi PÎncă nu există evaluări
- Swing Up A Pendulum by Energy Control: Arafat Zaidan, Bashir M.Y.Nouri, Basim AlsayidDocument7 paginiSwing Up A Pendulum by Energy Control: Arafat Zaidan, Bashir M.Y.Nouri, Basim AlsayidNor Rochmad Hadi PÎncă nu există evaluări
- The Application of Nonlinear PID Controller in Generator Excitation SystemDocument6 paginiThe Application of Nonlinear PID Controller in Generator Excitation SystemNor Rochmad Hadi PÎncă nu există evaluări
- (Program Name: Newprogram1) (Section Name: Section1)Document1 pagină(Program Name: Newprogram1) (Section Name: Section1)Nor Rochmad Hadi PÎncă nu există evaluări
- Mpu6050 SlidesDocument12 paginiMpu6050 SlidesNor Rochmad Hadi PÎncă nu există evaluări
- A.3s Scheme Used in Managing Epp ClassDocument35 paginiA.3s Scheme Used in Managing Epp Classpixie02100% (2)
- Microsoft Excel ExercisesDocument14 paginiMicrosoft Excel ExercisesJumaryse Marabut100% (2)
- Document E202 - 2008: Building Information Modeling Protocol ExhibitDocument9 paginiDocument E202 - 2008: Building Information Modeling Protocol ExhibitAndres Cedeno TutivenÎncă nu există evaluări
- Building Resilience Philippines Urban PoorDocument16 paginiBuilding Resilience Philippines Urban PoorYasmin Pheebie BeltranÎncă nu există evaluări
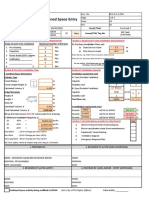
- Ventilation Plan For Confined Space EntryDocument9 paginiVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Bio-Climatic Tower/Eco-Tower: Bachelor of ArchitectureDocument12 paginiBio-Climatic Tower/Eco-Tower: Bachelor of ArchitectureZorawar Singh Basur67% (3)
- Duplichecker Plagiarism Report 3Document3 paginiDuplichecker Plagiarism Report 3Mushfiqur RahmanÎncă nu există evaluări
- BrainSpace - January 2024 CADocument46 paginiBrainSpace - January 2024 CARafal ZawadkaÎncă nu există evaluări
- RAN KPI MonitorDocument8 paginiRAN KPI MonitorOmer WaqarÎncă nu există evaluări
- FormatCARS KAAUH Alqahtani 106Document8 paginiFormatCARS KAAUH Alqahtani 106ZEYNOÎncă nu există evaluări
- 03 - Gherkin An OverviewDocument19 pagini03 - Gherkin An OverviewArunkumar KrishnamoorthyÎncă nu există evaluări
- List of British StandardsDocument6 paginiList of British StandardsPankajÎncă nu există evaluări
- Materi HAZOP Dan Relevansi Terhadap ASME Dan APIDocument9 paginiMateri HAZOP Dan Relevansi Terhadap ASME Dan APIAhmad KharisÎncă nu există evaluări
- Synopsis Sagar Project - A Study On The Need of CRM in OrganizatonDocument3 paginiSynopsis Sagar Project - A Study On The Need of CRM in OrganizatonViraja GuruÎncă nu există evaluări
- Channel Line Up 2018 Manual TVDocument1 paginăChannel Line Up 2018 Manual TVVher Christopher DucayÎncă nu există evaluări
- Chapter 5: Attention and PerformanceDocument10 paginiChapter 5: Attention and Performancerebela29Încă nu există evaluări
- The Housekeeping Department: Learning Activity #1Document4 paginiThe Housekeeping Department: Learning Activity #1Limar Geoff G. RosalesÎncă nu există evaluări
- Industrial Visit Report - 08 09 2018Document11 paginiIndustrial Visit Report - 08 09 2018HARIKRISHNA MÎncă nu există evaluări
- t640 - Parts CatalogDocument69 paginit640 - Parts CatalogSattittecInfomáticaÎncă nu există evaluări
- SANY HDForklift Brochure-112018Document14 paginiSANY HDForklift Brochure-112018Rossman Mejicanos100% (1)
- GIYA Classroom VisitationDocument4 paginiGIYA Classroom VisitationRussell Moralla100% (2)
- Series Portable Oscilloscopes: Keysight DSO1000A/BDocument15 paginiSeries Portable Oscilloscopes: Keysight DSO1000A/BNestor CardenasÎncă nu există evaluări
- Everything You Need to Know About TimberDocument63 paginiEverything You Need to Know About TimberAkxzÎncă nu există evaluări
- Service Manual 900 OG Factory 16V M85-M93Document572 paginiService Manual 900 OG Factory 16V M85-M93Sting Eyes100% (1)
- General Chemistry 2 - LAS 2 LEARNING CAPSULEDocument5 paginiGeneral Chemistry 2 - LAS 2 LEARNING CAPSULEMark RazÎncă nu există evaluări
- Toms2003 A Nonlinear Finite Element Analysis of The Periodontal Ligament Under Orthodontic Tooth LoadingDocument9 paginiToms2003 A Nonlinear Finite Element Analysis of The Periodontal Ligament Under Orthodontic Tooth LoadingPuttnaree NiteÎncă nu există evaluări
- Causal Inference For The Brave and True - Causal Inference For The Brave and TrueDocument2 paginiCausal Inference For The Brave and True - Causal Inference For The Brave and TrueVkook ForeverÎncă nu există evaluări
- Safety and Arming Device Timer 6-7-1976Document5 paginiSafety and Arming Device Timer 6-7-1976nguyenhÎncă nu există evaluări
- Languages and CommunicationDocument17 paginiLanguages and CommunicationDERICK REBAYÎncă nu există evaluări
- Temp Gradient For Warping Stress in Rigid PavementDocument9 paginiTemp Gradient For Warping Stress in Rigid PavementAmul KotharkarÎncă nu există evaluări