S-ar putea să vă placă și
- Computational Geometry: Exploring Geometric Insights for Computer VisionDe la EverandComputational Geometry: Exploring Geometric Insights for Computer VisionÎncă nu există evaluări
- Course DesignDocument23 paginiCourse Designaimn1766Încă nu există evaluări
- Procedure For ImplementationDocument5 paginiProcedure For ImplementationOtieno MosesÎncă nu există evaluări
- MESH2D - Automatic 2D Mesh GenerationDocument5 paginiMESH2D - Automatic 2D Mesh GenerationIgor GjorgjievÎncă nu există evaluări
- HW2 For Students PDFDocument5 paginiHW2 For Students PDFmsk123123Încă nu există evaluări
- Assignment 2Document6 paginiAssignment 2JohnÎncă nu există evaluări
- DM HW2 SolDocument4 paginiDM HW2 SolWafaa BasilÎncă nu există evaluări
- Cse625h3 2022Document3 paginiCse625h3 2022Umair AhmadÎncă nu există evaluări
- Maxbox - Starter68 Machine LearningDocument5 paginiMaxbox - Starter68 Machine LearningMax KleinerÎncă nu există evaluări
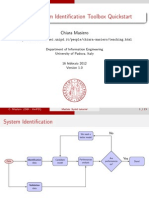
- Matlab SysId TutorialDocument23 paginiMatlab SysId TutorialPhạm Văn TưởngÎncă nu există evaluări
- Comparison of Various System Identification Methods For A MISO SystemDocument16 paginiComparison of Various System Identification Methods For A MISO SystemSashank Varma JampanaÎncă nu există evaluări
- JpegDocument66 paginiJpegMelanie Torres BisbalÎncă nu există evaluări
- EMDLABDocument17 paginiEMDLABkhalil.touimi.dzÎncă nu există evaluări
- Assignment 2Document5 paginiAssignment 2Rajesh RamjagasarÎncă nu există evaluări
- Lab 01 - Examine Seismic Data 2Document6 paginiLab 01 - Examine Seismic Data 2api-323770220Încă nu există evaluări
- Estimation of Random Utility Models in R: The Mlogit PackageDocument40 paginiEstimation of Random Utility Models in R: The Mlogit PackageCarlos Eduardo Melo MartínezÎncă nu există evaluări
- House Price Prediction Using Machine Learning in PythonDocument13 paginiHouse Price Prediction Using Machine Learning in PythonMayank Vasisth GandhiÎncă nu există evaluări
- Explore Weather TrendsDocument6 paginiExplore Weather TrendsJeeva KÎncă nu există evaluări
- Calculation and Reblocking Tools Added To MineSight® DARTDocument4 paginiCalculation and Reblocking Tools Added To MineSight® DART11804Încă nu există evaluări
- ML Lab 3Document5 paginiML Lab 3Jahangir AwanÎncă nu există evaluări
- Heatmap InstructionDocument9 paginiHeatmap InstructionNguyễn Hải ĐăngÎncă nu există evaluări
- Saveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RDocument63 paginiSaveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RMuzakir Laikh KhanÎncă nu există evaluări
- ButterflyDocument21 paginiButterflymasterrkÎncă nu există evaluări
- Machine Learning AssignmentDocument8 paginiMachine Learning AssignmentJoshuaDownesÎncă nu există evaluări
- XGBoost R TutorialDocument10 paginiXGBoost R TutorialNitish100% (1)
- COL215 Assignment 3: Title: Digital Image FilterDocument6 paginiCOL215 Assignment 3: Title: Digital Image FilterKatia Rania BITAMÎncă nu există evaluări
- Presentation GeoxpDocument9 paginiPresentation GeoxpIrch NgoubiliÎncă nu există evaluări
- Assignment01 1Document2 paginiAssignment01 1Ahsan JavedÎncă nu există evaluări
- Data Mining Exercise 3Document11 paginiData Mining Exercise 3Mohamed BoukhariÎncă nu există evaluări
- DSP - Manual PartDocument12 paginiDSP - Manual PartShivani AgarwalÎncă nu există evaluări
- A Method For Slicing CAD Models in Binary STL Format IATS-libreDocument5 paginiA Method For Slicing CAD Models in Binary STL Format IATS-libreAnonymous AjEedIk81Încă nu există evaluări
- Heterogeneity in Parallel and Distributed SystemsDocument5 paginiHeterogeneity in Parallel and Distributed Systemssidrakhalid1357Încă nu există evaluări
- OOP's Lab Programs QuestionsDocument4 paginiOOP's Lab Programs QuestionsBhavesh Sai DonthineniÎncă nu există evaluări
- AOD Lab1 2Document6 paginiAOD Lab1 2tin nguyenÎncă nu există evaluări
- Scripts Make MineSight BetterDocument5 paginiScripts Make MineSight Better11804100% (1)
- Sheet 5 AssignmentDocument4 paginiSheet 5 AssignmentajokemoneÎncă nu există evaluări
- Natural Computing - Practical Assignment: Solving Traveling Salesman Problems With Nature-Inspired AlgorithmsDocument4 paginiNatural Computing - Practical Assignment: Solving Traveling Salesman Problems With Nature-Inspired AlgorithmsHotland SitorusÎncă nu există evaluări
- Capital University of Science and Technology Department of Computer Science CS 3163: Design and Analysis of Algorithms (3) : Fall 2020Document4 paginiCapital University of Science and Technology Department of Computer Science CS 3163: Design and Analysis of Algorithms (3) : Fall 2020Malik NaveedÎncă nu există evaluări
- 2022 003 - Gomez Zapata and Pittore - Data Description PDFDocument6 pagini2022 003 - Gomez Zapata and Pittore - Data Description PDFCamilo GZÎncă nu există evaluări
- Digits Recognition DatasetDocument4 paginiDigits Recognition DatasetJoe1Încă nu există evaluări
- CRISIS Manual PDFDocument154 paginiCRISIS Manual PDFjoseph_roodÎncă nu există evaluări
- Data Mining Problem 2 ReportDocument13 paginiData Mining Problem 2 ReportBabu ShaikhÎncă nu există evaluări
- Srinivas Institute of Technology, Mangalore Page 1 of 38Document38 paginiSrinivas Institute of Technology, Mangalore Page 1 of 38PsyGikÎncă nu există evaluări
- Day13-K-Means ClusteringDocument10 paginiDay13-K-Means ClusteringSBS MoviesÎncă nu există evaluări
- Unsupervised Learning - Clustering Cheatsheet - CodecademyDocument5 paginiUnsupervised Learning - Clustering Cheatsheet - CodecademyImane LoukiliÎncă nu există evaluări
- OOP CS2104 Assignment-2Document3 paginiOOP CS2104 Assignment-2armaan04062004Încă nu există evaluări
- Image2CAD AdityaIntwala CVIP2019Document11 paginiImage2CAD AdityaIntwala CVIP2019christopher dzuwaÎncă nu există evaluări
- Data Types and StructuresDocument13 paginiData Types and StructuresDecklinÎncă nu există evaluări
- Final CSE 4361Document2 paginiFinal CSE 4361Md. Sohel RahmanÎncă nu există evaluări
- Cadence Spectre Matlab ToolboxDocument11 paginiCadence Spectre Matlab Toolboxabhi_nxp0% (1)
- Assignmt 3Document15 paginiAssignmt 3Tom AfaÎncă nu există evaluări
- DS Final Exam 2018 FallDocument8 paginiDS Final Exam 2018 FallJannat NasirÎncă nu există evaluări
- 2d-String Arrays & FunctionsDocument21 pagini2d-String Arrays & FunctionsFarhanÎncă nu există evaluări
- Tagore Institute of Engineering and TechnologyDocument8 paginiTagore Institute of Engineering and Technologycsetiet csetietÎncă nu există evaluări
- Mat Raft BentleyDocument3 paginiMat Raft BentleyParameswaran GanesanÎncă nu există evaluări
- Dynamic Memory Allocation and Dynamic Structures: Full ProgramDocument6 paginiDynamic Memory Allocation and Dynamic Structures: Full ProgramAntônio Eduardo CarvalhoÎncă nu există evaluări
- Abinitio CommandsDocument2 paginiAbinitio CommandsSarat ChandÎncă nu există evaluări
- CS F342 Computer Architecture BITS Pilani, Hyderabad Campus Assignment - 1 Due Date: On or Before 7 Nov 2013 (By 5:00 P.M)Document1 paginăCS F342 Computer Architecture BITS Pilani, Hyderabad Campus Assignment - 1 Due Date: On or Before 7 Nov 2013 (By 5:00 P.M)Ashish SharmaÎncă nu există evaluări
- GEOPAK Terrain and Subsurface Modeling v8 1Document358 paginiGEOPAK Terrain and Subsurface Modeling v8 1Howard GibbonsÎncă nu există evaluări
- Vibration Measurement Handbook MideDocument14 paginiVibration Measurement Handbook MideJason DrakeÎncă nu există evaluări
- Measures of Variability: RangeDocument5 paginiMeasures of Variability: Rangegladysann churchÎncă nu există evaluări
- Experiment 2: Plane and Spherical MirrorsDocument13 paginiExperiment 2: Plane and Spherical MirrorsJason DemdamÎncă nu există evaluări
- GATE Chemical Engineering 2003Document12 paginiGATE Chemical Engineering 2003anand singhÎncă nu există evaluări
- State Space RepresentationDocument34 paginiState Space RepresentationMuhammad UsmanÎncă nu există evaluări
- Python SyllabusDocument6 paginiPython SyllabusVenkat KancherlaÎncă nu există evaluări
- FOC Lab ManualDocument114 paginiFOC Lab Manualsivadba345Încă nu există evaluări
- Logistics Models: Question One (Exercise 6.1)Document6 paginiLogistics Models: Question One (Exercise 6.1)Olaolu JosephÎncă nu există evaluări
- Factors of ProductionDocument5 paginiFactors of ProductionKanwal MansoorÎncă nu există evaluări
- Timss Trend in Mathematics and Science StudyDocument22 paginiTimss Trend in Mathematics and Science Studyonesa2Încă nu există evaluări
- AdvaithamDocument2 paginiAdvaithamBhogar SishyanÎncă nu există evaluări
- Motoman ManualDocument16 paginiMotoman ManualvalentincaciorÎncă nu există evaluări
- SPPP1042-05-Computational ThinkingDocument26 paginiSPPP1042-05-Computational ThinkingKhairul IzzatÎncă nu există evaluări
- Structural Design of BinsDocument34 paginiStructural Design of Binsjayaraman3Încă nu există evaluări
- CH 6 Sampling - and - EstimationDocument15 paginiCH 6 Sampling - and - EstimationPoint BlankÎncă nu există evaluări
- OrigamiDocument2 paginiOrigamiYong Bao NiÎncă nu există evaluări
- Part - Iii: Mathematics: JEE (ADVANCED) 2013-Paper 1-PCM-17Document9 paginiPart - Iii: Mathematics: JEE (ADVANCED) 2013-Paper 1-PCM-17Mohammed IqbalÎncă nu există evaluări
- Admission Requirements For Candidates With Wassce/Sssce A' Level, Abce/Gbce, MatureDocument23 paginiAdmission Requirements For Candidates With Wassce/Sssce A' Level, Abce/Gbce, Maturede eagleÎncă nu există evaluări
- 3rd PrepDocument61 pagini3rd Prepmohamed faroukÎncă nu există evaluări
- Introduction of Conventional Stress Analysis Method Based On Kowalski's Formula at Internal Thread UndercutDocument4 paginiIntroduction of Conventional Stress Analysis Method Based On Kowalski's Formula at Internal Thread UndercutThale1905Încă nu există evaluări
- Theory of Architecture - IIDocument59 paginiTheory of Architecture - IILokesh JangirÎncă nu există evaluări
- Application of Derivative (AOD)Document24 paginiApplication of Derivative (AOD)Raju SinghÎncă nu există evaluări
- Veritas Prep Errata PDFDocument69 paginiVeritas Prep Errata PDFManish jaiswalÎncă nu există evaluări
- Micro CH-7 RevenueDocument8 paginiMicro CH-7 RevenueLalitKukrejaÎncă nu există evaluări
- MandelbrotDocument6 paginiMandelbrotChris SudjanaÎncă nu există evaluări
- Opman NotesDocument10 paginiOpman NotesaegihyunÎncă nu există evaluări
- Statistics and Probability Yong Hwa M. Jeong Grade 11 STEM-B Quarter 4 - Module 1: Test of HypothesisDocument22 paginiStatistics and Probability Yong Hwa M. Jeong Grade 11 STEM-B Quarter 4 - Module 1: Test of HypothesisSarahmae MeñozaÎncă nu există evaluări
- Thermodynamics NotesDocument41 paginiThermodynamics NotesAbel NetoÎncă nu există evaluări
- B.Tech Physics Course NIT Jalandhar Electrostatics Lecture 4Document30 paginiB.Tech Physics Course NIT Jalandhar Electrostatics Lecture 4Jaspreet Singh SidhuÎncă nu există evaluări
- Work Done by A Variable Force (Vertical Effort) ExperimentDocument3 paginiWork Done by A Variable Force (Vertical Effort) ExperimentMuhd Akmal50% (2)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisDe la EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisEvaluare: 5 din 5 stele5/5 (15)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipDe la EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipEvaluare: 4.5 din 5 stele4.5/5 (1135)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingDe la EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingEvaluare: 4.5 din 5 stele4.5/5 (149)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingDe la EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingEvaluare: 4.5 din 5 stele4.5/5 (497)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerDe la EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerEvaluare: 4.5 din 5 stele4.5/5 (56)
- Learn Spanish While SleepingDe la EverandLearn Spanish While SleepingEvaluare: 4 din 5 stele4/5 (20)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisDe la EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisEvaluare: 4.5 din 5 stele4.5/5 (30)
- Cynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyDe la EverandCynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyEvaluare: 4.5 din 5 stele4.5/5 (221)
- The Story of the World, Vol. 1 AudiobookDe la EverandThe Story of the World, Vol. 1 AudiobookEvaluare: 4.5 din 5 stele4.5/5 (3)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisDe la EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisEvaluare: 4.5 din 5 stele4.5/5 (2)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisDe la EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisEvaluare: 4.5 din 5 stele4.5/5 (22)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageDe la EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageEvaluare: 5 din 5 stele5/5 (73)
- Stoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionDe la EverandStoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionEvaluare: 5 din 5 stele5/5 (51)
- Learn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25De la EverandLearn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25Evaluare: 5 din 5 stele5/5 (17)
- Why Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeDe la EverandWhy Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeEvaluare: 3.5 din 5 stele3.5/5 (54)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisDe la EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisEvaluare: 5 din 5 stele5/5 (3)
- Summary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedDe la EverandSummary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedEvaluare: 5 din 5 stele5/5 (2)
- You Are Not Special: And Other EncouragementsDe la EverandYou Are Not Special: And Other EncouragementsEvaluare: 4.5 din 5 stele4.5/5 (6)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningDe la EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningEvaluare: 4.5 din 5 stele4.5/5 (55)
- Follow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.De la EverandFollow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.Încă nu există evaluări
- Rooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareDe la EverandRooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareÎncă nu există evaluări
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveDe la EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveEvaluare: 5 din 5 stele5/5 (1)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisDe la EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisEvaluare: 4 din 5 stele4/5 (6)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveDe la EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveEvaluare: 4 din 5 stele4/5 (25)