S-ar putea să vă placă și
- App.A - Technical Data ELEC - REFER AURECONDocument10 paginiApp.A - Technical Data ELEC - REFER AURECONnhatvpÎncă nu există evaluări
- Fiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionDocument25 paginiFiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionnhatvpÎncă nu există evaluări
- Arcing-Test - IEC 61641 - TEST HỒ QUANG ĐIỆNDocument18 paginiArcing-Test - IEC 61641 - TEST HỒ QUANG ĐIỆNnhatvpÎncă nu există evaluări
- Hybrid Prediction Model For The Interindustry Carbon Emissions Transfer Network Based On The Grey Model and General Vector MachineDocument12 paginiHybrid Prediction Model For The Interindustry Carbon Emissions Transfer Network Based On The Grey Model and General Vector MachinenhatvpÎncă nu există evaluări
- Context Deep Neural Network Model For Predicting Depression Risk Using Multiple RegressionDocument11 paginiContext Deep Neural Network Model For Predicting Depression Risk Using Multiple RegressionnhatvpÎncă nu există evaluări
- Comparative Study On Wireless Mobile Technology 1G, 2G, 3G, 4G and 5GDocument5 paginiComparative Study On Wireless Mobile Technology 1G, 2G, 3G, 4G and 5GnhatvpÎncă nu există evaluări
- Harmonic 1 PDFDocument24 paginiHarmonic 1 PDFnhatvpÎncă nu există evaluări
- Learning To Guide: Guidance Law Based On Deep Meta-Learning and Model Predictive Path Integral ControlDocument13 paginiLearning To Guide: Guidance Law Based On Deep Meta-Learning and Model Predictive Path Integral ControlnhatvpÎncă nu există evaluări
- Electrical Vehicle Path Tracking Based Model Predictive Control With A Laguerre Function and Exponential WeightDocument16 paginiElectrical Vehicle Path Tracking Based Model Predictive Control With A Laguerre Function and Exponential WeightnhatvpÎncă nu există evaluări
- Robust Model Predictive Control For A Class of Discrete-Time Markovian Jump Linear Systems With Operation Mode DisorderingDocument13 paginiRobust Model Predictive Control For A Class of Discrete-Time Markovian Jump Linear Systems With Operation Mode DisorderingnhatvpÎncă nu există evaluări
- A Cost-Effective and Low-Complexity Predictive Control For Matrix Converters Under Unbalanced Grid Voltage ConditionsDocument11 paginiA Cost-Effective and Low-Complexity Predictive Control For Matrix Converters Under Unbalanced Grid Voltage ConditionsnhatvpÎncă nu există evaluări
- Run-Time Efficiency of Bilinear Model Predictive Control Using Variational Methods, With Applications To Hydronic CoolingDocument11 paginiRun-Time Efficiency of Bilinear Model Predictive Control Using Variational Methods, With Applications To Hydronic CoolingnhatvpÎncă nu există evaluări
- Predictive Adaptive Cruise Control Using A Customized ECUDocument13 paginiPredictive Adaptive Cruise Control Using A Customized ECUnhatvpÎncă nu există evaluări
- A Probabilistic Algorithm For Predictive Control With Full-Complexity Models in Non-Residential BuildingsDocument18 paginiA Probabilistic Algorithm For Predictive Control With Full-Complexity Models in Non-Residential BuildingsnhatvpÎncă nu există evaluări
- Fast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGADocument13 paginiFast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGAnhatvpÎncă nu există evaluări
- Speed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsDocument10 paginiSpeed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsnhatvpÎncă nu există evaluări
- Machine Learning Based Adaptive PredictionDocument9 paginiMachine Learning Based Adaptive PredictionnhatvpÎncă nu există evaluări
- Linear Quadratic Predictive Fault-Tolerant Control For Multi-Phase Batch ProcessesDocument12 paginiLinear Quadratic Predictive Fault-Tolerant Control For Multi-Phase Batch ProcessesnhatvpÎncă nu există evaluări
- Model Predictive Control With Mixed Performances For Uncertain Positive SystemsDocument10 paginiModel Predictive Control With Mixed Performances For Uncertain Positive SystemsnhatvpÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Pressure Flow and Temperature SwitchesDocument16 paginiPressure Flow and Temperature SwitchesMD SAMANÎncă nu există evaluări
- Direct Current Generator ReviewerDocument16 paginiDirect Current Generator ReviewerCaitriona AngeletteÎncă nu există evaluări
- LG W4320S Service ManualDocument24 paginiLG W4320S Service ManualeleandrorobertoÎncă nu există evaluări
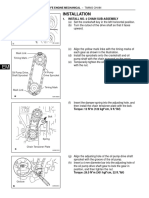
- Sincronizacion de Motor Toyota 2az-FeDocument12 paginiSincronizacion de Motor Toyota 2az-FeWilliams NavasÎncă nu există evaluări
- WRO 2018 WeDo RegularDocument14 paginiWRO 2018 WeDo RegularAlaas AlvcaszaÎncă nu există evaluări
- Ref: Bboneblk - SRM Beaglebone Black System Reference Manual Rev BDocument125 paginiRef: Bboneblk - SRM Beaglebone Black System Reference Manual Rev BhernangycÎncă nu există evaluări
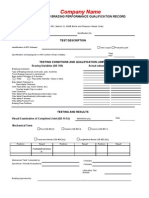
- BPQ REV. 0 Interactive FormDocument2 paginiBPQ REV. 0 Interactive FormcosmicbunnyÎncă nu există evaluări
- Ems2348x User Manual Id IdDocument104 paginiEms2348x User Manual Id IdGod GamerÎncă nu există evaluări
- Electra BrochureDocument10 paginiElectra BrochureVërshim KastratiÎncă nu există evaluări
- Pragmatic Electrical Engineering: FundamentalsDocument201 paginiPragmatic Electrical Engineering: FundamentalsaminmominÎncă nu există evaluări
- Ductle Iron Spec1Document8 paginiDuctle Iron Spec1윤병택Încă nu există evaluări
- CCI Control Valves For Fossil ApplicationsDocument2 paginiCCI Control Valves For Fossil ApplicationsGabrieldiazÎncă nu există evaluări
- BOQ For Interior WorkDocument2 paginiBOQ For Interior WorkSudhanshu MandlikÎncă nu există evaluări
- SearchBot Results For Touchstone 1Document6 paginiSearchBot Results For Touchstone 1CÎncă nu există evaluări
- TORONTO01Document2 paginiTORONTO01itrcentre07Încă nu există evaluări
- LEGRAND Main Price List April 2012Document124 paginiLEGRAND Main Price List April 2012Ajay SinghÎncă nu există evaluări
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Document24 paginiData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainÎncă nu există evaluări
- GANTREX® MK6 Rail PadDocument4 paginiGANTREX® MK6 Rail PadwickremasingheÎncă nu există evaluări
- DC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualDocument23 paginiDC Voltage & Current Digital Panel Meter, Model 451A: Quick ManualdedekeetÎncă nu există evaluări
- Network Management Card - Installation Manual - EngDocument30 paginiNetwork Management Card - Installation Manual - EngZunaira ShafiÎncă nu există evaluări
- Pds Luxathane 5000 VocDocument2 paginiPds Luxathane 5000 Vocmuthukumar100% (1)
- Ht-Discharge Pipes and Fittings (PPS) : KunststoffeDocument35 paginiHt-Discharge Pipes and Fittings (PPS) : Kunststoffeluis eduardo ramos rebataÎncă nu există evaluări
- IsCAN Labview DeveloperDocument30 paginiIsCAN Labview Developerafsala1982Încă nu există evaluări
- Sky Spark White PaperDocument7 paginiSky Spark White PaperJohn KablerÎncă nu există evaluări
- SMDocument36 paginiSMharan2000Încă nu există evaluări
- IPCR Part 2 2017Document4 paginiIPCR Part 2 2017RommelÎncă nu există evaluări
- Set 2 Unit 2 PDF FreeDocument13 paginiSet 2 Unit 2 PDF FreeASHWATH G (RA2111018010045)Încă nu există evaluări
- PR-1078 - Hydrogen Sulphide Management ProcedureDocument22 paginiPR-1078 - Hydrogen Sulphide Management Procedureromedic360% (1)
- Report For Neha Lem ArchitectureDocument17 paginiReport For Neha Lem ArchitecturewafasaÎncă nu există evaluări