S-ar putea să vă placă și
- Filosofía PDFDocument9 paginiFilosofía PDFMiguel SanchezÎncă nu există evaluări
- Filosofía PDFDocument9 paginiFilosofía PDFMiguel SanchezÎncă nu există evaluări
- Sectores Productivos Del PeruDocument39 paginiSectores Productivos Del PeruAriana Bravo CamachoÎncă nu există evaluări
- Cambio Climático de UrubambaDocument28 paginiCambio Climático de UrubambaAriana Bravo CamachoÎncă nu există evaluări
- Ing Industrial Trabajo de Diagrama de Op. de ProcesosDocument14 paginiIng Industrial Trabajo de Diagrama de Op. de ProcesosAriana Bravo CamachoÎncă nu există evaluări
- Determinación de La Textura Del SueloDocument4 paginiDeterminación de La Textura Del SueloAriana Bravo CamachoÎncă nu există evaluări
- Cambio Climático de UrubambaDocument28 paginiCambio Climático de UrubambaAriana Bravo CamachoÎncă nu există evaluări
- Clasificación Del ClimaDocument27 paginiClasificación Del ClimaAriana Bravo CamachoÎncă nu există evaluări
- Cambio Climático de UrubambaDocument28 paginiCambio Climático de UrubambaAriana Bravo CamachoÎncă nu există evaluări
- INTRODUCCIÓNDocument18 paginiINTRODUCCIÓNAriana Bravo CamachoÎncă nu există evaluări
- Sem 6-7Document34 paginiSem 6-7Ariana Bravo CamachoÎncă nu există evaluări
- Clasificación Del ClimaDocument27 paginiClasificación Del ClimaAriana Bravo CamachoÎncă nu există evaluări
- Clasificación Climática ClaseDocument8 paginiClasificación Climática ClaseAriana Bravo CamachoÎncă nu există evaluări
- Parques NacionalesDocument8 paginiParques NacionalesAriana Bravo CamachoÎncă nu există evaluări
- INTRODUCCIÓNDocument18 paginiINTRODUCCIÓNAriana Bravo CamachoÎncă nu există evaluări
- Infome de Avistamiento de AvesDocument20 paginiInfome de Avistamiento de AvesAriana Bravo CamachoÎncă nu există evaluări
- Factores Que Influyen en El Proceso de Formación Del Relieve Terrestre Observados en El Valle de HuauraDocument6 paginiFactores Que Influyen en El Proceso de Formación Del Relieve Terrestre Observados en El Valle de HuauraAriana Bravo CamachoÎncă nu există evaluări
- Parques NacionalesDocument5 paginiParques NacionalesAriana Bravo CamachoÎncă nu există evaluări
- Universidad Nacional José Faustino Sánchez CarriónDocument10 paginiUniversidad Nacional José Faustino Sánchez CarriónAriana Bravo CamachoÎncă nu există evaluări
- Determinación de La Textura Del SueloDocument12 paginiDeterminación de La Textura Del SueloAriana Bravo CamachoÎncă nu există evaluări
- Analisis Sistematico de Los Cationes Del Segundo GrupoDocument8 paginiAnalisis Sistematico de Los Cationes Del Segundo GrupoAlexis Pacheco CastilloÎncă nu există evaluări
- Parques NacionalesDocument5 paginiParques NacionalesAriana Bravo CamachoÎncă nu există evaluări
- Factores Que Influyen en El Proceso de Formación Del Relieve Terrestre Observados en El Valle de HuauraDocument6 paginiFactores Que Influyen en El Proceso de Formación Del Relieve Terrestre Observados en El Valle de HuauraAriana Bravo CamachoÎncă nu există evaluări
- Parques NacionalesDocument5 paginiParques NacionalesAriana Bravo CamachoÎncă nu există evaluări
- Monosacaridos y DiscararidosDocument15 paginiMonosacaridos y DiscararidosAriana Bravo CamachoÎncă nu există evaluări
- Bases de La GeomorfologíaDocument14 paginiBases de La GeomorfologíaYzak AguilarÎncă nu există evaluări
- Monosacaridos y DiscararidosDocument15 paginiMonosacaridos y DiscararidosAriana Bravo CamachoÎncă nu există evaluări
- Tema 05 ProteinasDocument14 paginiTema 05 ProteinasSandy VeintiauÎncă nu există evaluări
- Pila Semántica en Un Analizador SintácticoDocument12 paginiPila Semántica en Un Analizador SintácticoRaúl Axel MariscalÎncă nu există evaluări
- Informe PermeabilidadDocument15 paginiInforme PermeabilidadPersie MendozaÎncă nu există evaluări
- Ensayo Por Otro Camino.Document6 paginiEnsayo Por Otro Camino.lucho portuanoÎncă nu există evaluări
- Diagrama DAPDocument11 paginiDiagrama DAPMarcelo MartínezÎncă nu există evaluări
- Verbos Modales y MenuDocument3 paginiVerbos Modales y Menumakawin71773Încă nu există evaluări
- Norma ISADocument41 paginiNorma ISAElizabeth HernandezÎncă nu există evaluări
- Filosofia NEOKANTISMODocument7 paginiFilosofia NEOKANTISMOLeugenis Beltre RamirezÎncă nu există evaluări
- Resolución 4272 de 2021 - ALTURASDocument20 paginiResolución 4272 de 2021 - ALTURASJane BerrioÎncă nu există evaluări
- Ordenamiento de DatosDocument32 paginiOrdenamiento de DatosRomán Terrazas ValdezÎncă nu există evaluări
- Manual para Oficiales de Mesa FIBA ESPAÑOLDocument104 paginiManual para Oficiales de Mesa FIBA ESPAÑOLcamilo prieto0% (1)
- Practica2 EyM ResendizDanielLissetDocument4 paginiPractica2 EyM ResendizDanielLissetResendiz Daniel LissetÎncă nu există evaluări
- FT Energy Sel-146239Document4 paginiFT Energy Sel-146239495715 45 1251514Încă nu există evaluări
- Taller Sobre La CulturaDocument6 paginiTaller Sobre La CulturaDanna LezamaÎncă nu există evaluări
- Ley de Identidad de OrigenDocument6 paginiLey de Identidad de OrigenTodo NoticiasÎncă nu există evaluări
- Dirección de Bienestar UniversitarioDocument20 paginiDirección de Bienestar UniversitarioRoger MuchaÎncă nu există evaluări
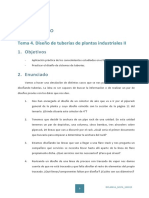
- Enunciado Caso Práctico - M1T4 - Diseño de Tuberías de Plantas Industriales IIDocument3 paginiEnunciado Caso Práctico - M1T4 - Diseño de Tuberías de Plantas Industriales IIAnny Carolina Correa RamírezÎncă nu există evaluări
- Formulario Unico Impuesto Industria y Comercio RoviraDocument3 paginiFormulario Unico Impuesto Industria y Comercio Rovirapatricia sanchezÎncă nu există evaluări
- Monografia Participacion Politica CiudadanaDocument22 paginiMonografia Participacion Politica CiudadanaGuido Rojas VasquezÎncă nu există evaluări
- Infografia Espinazo de La NocheDocument1 paginăInfografia Espinazo de La Nocheana buelvas100% (2)
- GincanaDocument3 paginiGincanaEstefanía Riveros PÎncă nu există evaluări
- Proyecto Pedagógico Historia y GeografíaDocument4 paginiProyecto Pedagógico Historia y GeografíaCarmen Cabral0% (1)
- Lista de Chequeo Informe TecnicoDocument3 paginiLista de Chequeo Informe TecnicoVictor AcostaÎncă nu există evaluări
- Cómo Describirían La Actitud de Miss Emily para Con El PuebloDocument3 paginiCómo Describirían La Actitud de Miss Emily para Con El PuebloPaula33% (3)
- 10.1.4 Packet Tracer - Configure Initial Router SettingsDocument13 pagini10.1.4 Packet Tracer - Configure Initial Router SettingsCoor. Infraestructura - Daniel SuarezÎncă nu există evaluări
- ISO 9001 Cross Reference Matrix SPDocument5 paginiISO 9001 Cross Reference Matrix SPEduardo Santa MaríaÎncă nu există evaluări
- Primera Tarea MatildeDocument3 paginiPrimera Tarea MatildeedwardÎncă nu există evaluări
- PCP Estructura OrganizacionalDocument18 paginiPCP Estructura OrganizacionalPaulo Arzapalo RoqueÎncă nu există evaluări
- Prácticas Profesionalizantes ANTECEDENTES ASO ARG EMP 13Document64 paginiPrácticas Profesionalizantes ANTECEDENTES ASO ARG EMP 13rafael ernestoÎncă nu există evaluări
- Instituto Técnico de Exalumnos SalesianosDocument6 paginiInstituto Técnico de Exalumnos SalesianosAda Marta GarciaÎncă nu există evaluări