S-ar putea să vă placă și
- CNC SERVO ADJUSTMENT GUIDEDocument120 paginiCNC SERVO ADJUSTMENT GUIDEAlisson cruzÎncă nu există evaluări
- Gfk1342e - Important Product Information Cimplicity Hmi For CNC Version 4.0Document6 paginiGfk1342e - Important Product Information Cimplicity Hmi For CNC Version 4.0Eduardo NascimentoÎncă nu există evaluări
- Gfk1341D - CIMPLICITY HMI For CNC Operation ManualDocument153 paginiGfk1341D - CIMPLICITY HMI For CNC Operation ManualEduardo NascimentoÎncă nu există evaluări
- How To Open Siemens System PCU50: Select Desktop Sunrise Press OKDocument10 paginiHow To Open Siemens System PCU50: Select Desktop Sunrise Press OKAshutosh BhardwajÎncă nu există evaluări
- Fourth-Axis Beta-I Drive Kit User Manual B-165ADocument20 paginiFourth-Axis Beta-I Drive Kit User Manual B-165AGuillermo RamirezÎncă nu există evaluări
- Fanuc SPM PDFDocument2 paginiFanuc SPM PDFBrianÎncă nu există evaluări
- 1.8 NC Format ProcedureDocument3 pagini1.8 NC Format ProcedureFredy CabrejoÎncă nu există evaluări
- GFK 0467 MDocument337 paginiGFK 0467 MeldetulyeÎncă nu există evaluări
- HEIDENHAIN Inverter Systems GuideDocument48 paginiHEIDENHAIN Inverter Systems Guiderccarles100% (1)
- 802Dsl AlarmesDocument438 pagini802Dsl AlarmesWagner Rodolfo da SilvaÎncă nu există evaluări
- Usb Floppy Emulation ManualDocument16 paginiUsb Floppy Emulation ManualsaripdolÎncă nu există evaluări
- Meldas c6-c64 Network ManualDocument208 paginiMeldas c6-c64 Network ManualsunhuynhÎncă nu există evaluări
- Doumentacion Ghost - DMGDocument8 paginiDoumentacion Ghost - DMGAntonio de la TorreÎncă nu există evaluări
- Fanuc Alpha-I Series Spindle Amplifier Module Troubleshooting and ActionDocument24 paginiFanuc Alpha-I Series Spindle Amplifier Module Troubleshooting and ActionMD WAQAR KHANÎncă nu există evaluări
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 paginiVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyÎncă nu există evaluări
- Start Up Procedure For Siemens MDocument6 paginiStart Up Procedure For Siemens MS.DharanipathyÎncă nu există evaluări
- Proficy Machine Edition: Printed ManualsDocument1 paginăProficy Machine Edition: Printed ManualsRitesh SharmaÎncă nu există evaluări
- Advanced One-Touch Igf-L: Operation Manual - Operation FunctionDocument11 paginiAdvanced One-Touch Igf-L: Operation Manual - Operation FunctionesojesÎncă nu există evaluări
- SerialSpindle AlarmDocument11 paginiSerialSpindle AlarmserkandmÎncă nu există evaluări
- 16 Fanuc Input and Output Link 2Document19 pagini16 Fanuc Input and Output Link 2liqvidatortdÎncă nu există evaluări
- Yaskawa TroubleshootingDocument45 paginiYaskawa TroubleshootingVladimirAgeevÎncă nu există evaluări
- Cnctrain Fanuc0M: CNC Simulation Systems 1995 2010Document51 paginiCnctrain Fanuc0M: CNC Simulation Systems 1995 2010Siti Idah TawhidÎncă nu există evaluări
- Gts-200 Operation Manual 11 VerDocument398 paginiGts-200 Operation Manual 11 VersunhuynhÎncă nu există evaluări
- Technical Manual for Inverter Systems and MotorsDocument655 paginiTechnical Manual for Inverter Systems and MotorsSlawaÎncă nu există evaluări
- SINUMERIK 840D SL NC Variable and Interface SignalsDocument738 paginiSINUMERIK 840D SL NC Variable and Interface SignalsFilipe BragaÎncă nu există evaluări
- KellenbergerDocument44 paginiKellenbergerAminÎncă nu există evaluări
- FANUC 0i Ethernet SettingsDocument44 paginiFANUC 0i Ethernet Settingsbhaskarjalan100% (1)
- PMC Supplemental Programming ManualDocument88 paginiPMC Supplemental Programming ManualTien Nguyen VanÎncă nu există evaluări
- Medoc DosDocument16 paginiMedoc DosGUSZ_GUSZÎncă nu există evaluări
- GE Fanuc Automation: Beta Series Servo Motor I/O Link OptionDocument200 paginiGE Fanuc Automation: Beta Series Servo Motor I/O Link Optionquentin lebrunÎncă nu există evaluări
- Change ALM Module Input Voltage on 840D sl DriveDocument5 paginiChange ALM Module Input Voltage on 840D sl DriveDaveÎncă nu există evaluări
- Instalacion delNC or The PLC by Gildemeister 6017Document3 paginiInstalacion delNC or The PLC by Gildemeister 6017Antonio de la TorreÎncă nu există evaluări
- 2414 2416 Installation ProcedureDocument4 pagini2414 2416 Installation ProcedureJames BondÎncă nu există evaluări
- File Backup Using PCINDocument3 paginiFile Backup Using PCINnestor gonzalez de leonÎncă nu există evaluări
- FD Tial: Servicetechnical ReportDocument11 paginiFD Tial: Servicetechnical Reportnhatnguyen101Încă nu există evaluări
- Able F Ontents: Wire EDM Machine OperationDocument210 paginiAble F Ontents: Wire EDM Machine OperationtranhoachbnÎncă nu există evaluări
- OPERATION MANUAL SR-20R IV Type B cz.2Document300 paginiOPERATION MANUAL SR-20R IV Type B cz.2slawekudÎncă nu există evaluări
- FS16/18-MC/TC and FS16i/18i/21i-MA/TA external touch panel interface specificationsDocument7 paginiFS16/18-MC/TC and FS16i/18i/21i-MA/TA external touch panel interface specificationsmahdi elmayÎncă nu există evaluări
- Ethernet Option Board Opt-Ci: User's ManualDocument28 paginiEthernet Option Board Opt-Ci: User's ManualLuis TorresÎncă nu există evaluări
- 21 Series Mill Controller Operation Manual: Date: 2013/11/08Document138 pagini21 Series Mill Controller Operation Manual: Date: 2013/11/08Saif Uddin Ahmed100% (1)
- CAK36 ElectricalDocument33 paginiCAK36 Electricals_barriosÎncă nu există evaluări
- Fanuc 0 Series Controller Spindle Amplifier AlarmsDocument17 paginiFanuc 0 Series Controller Spindle Amplifier AlarmsHoangvinh DuongÎncă nu există evaluări
- Operating Instructions: Subject Siemens Tool Management Date / Version 16.03.2011 14:53:00 / V2.0.1.0 Control SiemensDocument45 paginiOperating Instructions: Subject Siemens Tool Management Date / Version 16.03.2011 14:53:00 / V2.0.1.0 Control SiemensGyörgy MurvaiÎncă nu există evaluări
- Alpha-I SPM Alarm CodesDocument20 paginiAlpha-I SPM Alarm CodesjoydeepÎncă nu există evaluări
- En 808D Commissioning Guide 2013-09Document98 paginiEn 808D Commissioning Guide 2013-09Sam eagle goodÎncă nu există evaluări
- Fanuc-Page-6 (Al SP, Servo, Sytem, PS,)Document17 paginiFanuc-Page-6 (Al SP, Servo, Sytem, PS,)Hoangvinh DuongÎncă nu există evaluări
- FANUC 30i/31i/32i SERIES BOOT SYSTEM APPENDIX C SCREEN AND OPERATION GUIDEDocument6 paginiFANUC 30i/31i/32i SERIES BOOT SYSTEM APPENDIX C SCREEN AND OPERATION GUIDERelu ChiruÎncă nu există evaluări
- List of Alarm Codes for CNC MachinesDocument78 paginiList of Alarm Codes for CNC Machinessssf-doboj100% (2)
- Cyclone Data Sheet-1Document10 paginiCyclone Data Sheet-1homersimpson01Încă nu există evaluări
- M800 - M80 - E80 - C80 Series Specifications Manual (Hardware) Ib1501506engc PDFDocument284 paginiM800 - M80 - E80 - C80 Series Specifications Manual (Hardware) Ib1501506engc PDFKuanTing KuoÎncă nu există evaluări
- Fanuc Drive AlramDocument4 paginiFanuc Drive AlrammntcepplÎncă nu există evaluări
- Sanyo Denki TapeReader Model 2702 Instruction ManualDocument18 paginiSanyo Denki TapeReader Model 2702 Instruction ManualcoronaqcÎncă nu există evaluări
- NC Check Sheet - 180921 - EN - Maquina 2-1Document2 paginiNC Check Sheet - 180921 - EN - Maquina 2-1Antonio de la TorreÎncă nu există evaluări
- BNP b2309 (Eng) D PDFDocument478 paginiBNP b2309 (Eng) D PDFAngga BismokoÎncă nu există evaluări
- Borrado de Todos Los Datos de NC y PLC Gildemeister 6017Document2 paginiBorrado de Todos Los Datos de NC y PLC Gildemeister 6017Antonio de la TorreÎncă nu există evaluări
- GE Fanuc Automation: Series 16i / 18i / 160i / 180i - Model ADocument450 paginiGE Fanuc Automation: Series 16i / 18i / 160i / 180i - Model AJ Ernesto Barragan PerezÎncă nu există evaluări
- U4074B Tone Ringer Interface CircuitDocument6 paginiU4074B Tone Ringer Interface CircuitVasilij PupkinÎncă nu există evaluări
- ARBO SA. COMMISSIONING - ARBO SE-WLS220-2,1-08 ElektronikaDocument8 paginiARBO SA. COMMISSIONING - ARBO SE-WLS220-2,1-08 ElektronikaTBF1DÎncă nu există evaluări
- PV PanelDocument17 paginiPV PanelMuhammad RiazÎncă nu există evaluări
- About Development Cautionary Note of Customization SoftwareDocument33 paginiAbout Development Cautionary Note of Customization SoftwareVladimirAgeevÎncă nu există evaluări
- Discovery 3.0 Litre V6 Diesel (10my Eu5) On-Board Diagnostics Engine Management SystemDocument70 paginiDiscovery 3.0 Litre V6 Diesel (10my Eu5) On-Board Diagnostics Engine Management SystemVladimirAgeevÎncă nu există evaluări
- 09 Doosan TIER 4I Engine 120425 PDFDocument24 pagini09 Doosan TIER 4I Engine 120425 PDFアウン ミョウÎncă nu există evaluări
- Bosch Pressure Sensor ManualDocument1 paginăBosch Pressure Sensor ManualVladimirAgeevÎncă nu există evaluări
- Diesel High Pressure Pump Test Kit: 1. SafetyDocument4 paginiDiesel High Pressure Pump Test Kit: 1. SafetyVladimirAgeevÎncă nu există evaluări
- Function Block Description FB283 SINAMICS S120 - S7-CPUsDocument29 paginiFunction Block Description FB283 SINAMICS S120 - S7-CPUsVladimirAgeevÎncă nu există evaluări
- EGR ValveDocument10 paginiEGR ValveVladimirAgeevÎncă nu există evaluări
- Hatz Diesel - Diagnostic Trouble Codes SPN/FMI C81 - V600 - 05653401Document23 paginiHatz Diesel - Diagnostic Trouble Codes SPN/FMI C81 - V600 - 05653401mohamed dokaÎncă nu există evaluări
- PPSN 02-2015-002 Diesel Exhaust Fluid Explained Rev - ADocument7 paginiPPSN 02-2015-002 Diesel Exhaust Fluid Explained Rev - AVladimirAgeevÎncă nu există evaluări
- Figure: 1-040-0: Group No: 240103-00665Document2 paginiFigure: 1-040-0: Group No: 240103-00665VladimirAgeevÎncă nu există evaluări
- DEF (Diesel Exhaust Fluid) Do's and Don'tsDocument1 paginăDEF (Diesel Exhaust Fluid) Do's and Don'tsVladimirAgeevÎncă nu există evaluări
- Doosan Diesel Engine DL06 PDFDocument211 paginiDoosan Diesel Engine DL06 PDFHANSELL MIRANDA ALVA100% (2)
- I-Device Function in Standard PN Communication: Simatic S7-Cpu, CP, Simotion, SinumerikDocument44 paginiI-Device Function in Standard PN Communication: Simatic S7-Cpu, CP, Simotion, SinumerikAbel MogesÎncă nu există evaluări
- Programming Recommendation For PLC S7 300 enDocument41 paginiProgramming Recommendation For PLC S7 300 enauduserÎncă nu există evaluări
- Diesel High Pressure Pump Test Kit: 1. SafetyDocument4 paginiDiesel High Pressure Pump Test Kit: 1. SafetyVladimirAgeevÎncă nu există evaluări
- Common Rail Systems With Up To 2,000 Bar For Off-Highway ApplicationsDocument2 paginiCommon Rail Systems With Up To 2,000 Bar For Off-Highway ApplicationsVladimirAgeevÎncă nu există evaluări
- Service Manual Common Rail System (CRS) - DensoDocument134 paginiService Manual Common Rail System (CRS) - DensoThang Tong86% (7)
- Full Text 01Document56 paginiFull Text 01iuctmeÎncă nu există evaluări
- CRP D 200 Manual EngDocument16 paginiCRP D 200 Manual EngAbbode Horani100% (2)
- Common Rail meter measures electrical componentsDocument7 paginiCommon Rail meter measures electrical componentsSutiknoÎncă nu există evaluări
- 2.5 Cable Diagrams: Cable Diagram For RS232Document1 pagină2.5 Cable Diagrams: Cable Diagram For RS232VladimirAgeevÎncă nu există evaluări
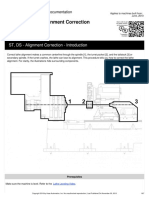
- Haas ST, DS - Alignment CorrectionDocument26 paginiHaas ST, DS - Alignment CorrectionVladimirAgeevÎncă nu există evaluări
- Service Manual: Compatible Robots: Control BoxDocument222 paginiService Manual: Compatible Robots: Control BoxVladimirAgeevÎncă nu există evaluări
- VBO Diagnostic Tools Manual (DX350LC-3/DX380LC-3)Document80 paginiVBO Diagnostic Tools Manual (DX350LC-3/DX380LC-3)VladimirAgeevÎncă nu există evaluări
- Start With Smart!: Fiber Sensor Best Selection CatalogDocument104 paginiStart With Smart!: Fiber Sensor Best Selection CatalogVladimirAgeevÎncă nu există evaluări
- FSSB Setup GuideDocument80 paginiFSSB Setup GuideVladimirAgeev100% (7)
- DMS Help ENDocument118 paginiDMS Help ENSegundo Francisco Jauregui ValenciaÎncă nu există evaluări
- Connect. 611U To The CPUDocument68 paginiConnect. 611U To The CPUVladimirAgeevÎncă nu există evaluări
- Service Manual: "Original Instructions"Document185 paginiService Manual: "Original Instructions"VladimirAgeevÎncă nu există evaluări
- SIMATIC S7 + TIA Function BlocksDocument109 paginiSIMATIC S7 + TIA Function BlocksVladimirAgeevÎncă nu există evaluări
- Factors Effecting PerformanceDocument47 paginiFactors Effecting Performancebembie83Încă nu există evaluări
- Julia Warner 2018Document1 paginăJulia Warner 2018Julia WarnerÎncă nu există evaluări
- LNMIIT Course Information Form: A. B. C. D. E. FDocument2 paginiLNMIIT Course Information Form: A. B. C. D. E. FAayush JainÎncă nu există evaluări
- Strategic Information Systems Planning: Course OverviewDocument18 paginiStrategic Information Systems Planning: Course OverviewEmmy W. RosyidiÎncă nu există evaluări
- How The Draganflyer Flies: So How Does It Work?Document5 paginiHow The Draganflyer Flies: So How Does It Work?sav33Încă nu există evaluări
- Aikah ProfileDocument20 paginiAikah ProfileMohammad ZeeshanÎncă nu există evaluări
- Abstracts Book Nanotech 2013Document151 paginiAbstracts Book Nanotech 2013felipe de jesus juarez torresÎncă nu există evaluări
- Hughes Brothers PDFDocument52 paginiHughes Brothers PDFJavier MaldonadoÎncă nu există evaluări
- VHF Low Loss Band-Pass Helical Filter For 145 MHZ - English NewDocument33 paginiVHF Low Loss Band-Pass Helical Filter For 145 MHZ - English NewSharbel AounÎncă nu există evaluări
- MCQ in Services MarketingDocument83 paginiMCQ in Services Marketingbatuerem0% (1)
- Computer Science: FieldsDocument2 paginiComputer Science: FieldstdoraxÎncă nu există evaluări
- OceanPixel Abundo Marine Renewable Energy An Emerging OptionDocument96 paginiOceanPixel Abundo Marine Renewable Energy An Emerging OptionjopaypagasÎncă nu există evaluări
- PV Design WorksheetDocument4 paginiPV Design WorksheetLarry Walker II100% (1)
- Tugas 1Document8 paginiTugas 1Muhammad Robby Firmansyah Ar-RasyiedÎncă nu există evaluări
- Module 8 SAHITA ConcreteDocument11 paginiModule 8 SAHITA ConcreteHarrybfnÎncă nu există evaluări
- Updated After 11th BoS Course Curriculum - B.tech CSEDocument120 paginiUpdated After 11th BoS Course Curriculum - B.tech CSEAnonymous 9etQKwWÎncă nu există evaluări
- Mechanical Engineer Resume - Digambar BhangeDocument3 paginiMechanical Engineer Resume - Digambar BhangeTOP DHAMAKAÎncă nu există evaluări
- حل جميع المعادلات الكهربائيةDocument60 paginiحل جميع المعادلات الكهربائيةGandhi HammoudÎncă nu există evaluări
- Gate Mock Test1Document17 paginiGate Mock Test1Gopinathan SudheerÎncă nu există evaluări
- Tutorial Ip 2 Win EnglishDocument25 paginiTutorial Ip 2 Win EnglishGarry Zein0% (1)
- Friday Night FightsDocument8 paginiFriday Night Fightsapi-629904068Încă nu există evaluări
- Inspection and Maintenance of Drillpipe Ebook PDFDocument39 paginiInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraÎncă nu există evaluări
- ALTERNATOR - ST170741: Parts ListDocument2 paginiALTERNATOR - ST170741: Parts Listkaswade BrianÎncă nu există evaluări
- Tda 1526Document15 paginiTda 1526Adilcio Melo0% (1)
- Value-Instruments Cat2012 enDocument58 paginiValue-Instruments Cat2012 enAnonymous C6Vaod9Încă nu există evaluări
- Saudi Arabia Power StationDocument108 paginiSaudi Arabia Power StationEhab HarbÎncă nu există evaluări
- Eurox Cross Flow ScrubberDocument8 paginiEurox Cross Flow ScrubberRobin LayogÎncă nu există evaluări
- Masterseal 550Document4 paginiMasterseal 550Arjun MulluÎncă nu există evaluări