S-ar putea să vă placă și
- Tech Tip: How To Test For An Alternator Voltage DropDocument2 paginiTech Tip: How To Test For An Alternator Voltage DropainginerÎncă nu există evaluări
- 2023 Tiger Neo Product Introduction-2023-4-25Document28 pagini2023 Tiger Neo Product Introduction-2023-4-25xNooMx NajaÎncă nu există evaluări
- VTG Control Unit For Xdrive BMW E83Document3 paginiVTG Control Unit For Xdrive BMW E83Barbu Constantin100% (1)
- Analog Circuit Techniques: With Digital InterfacingDe la EverandAnalog Circuit Techniques: With Digital InterfacingÎncă nu există evaluări
- Newnes Circuit Calculations Pocket Book: with Computer ProgramsDe la EverandNewnes Circuit Calculations Pocket Book: with Computer ProgramsÎncă nu există evaluări
- Axip 0200Document53 paginiAxip 0200starsalingsoul8000Încă nu există evaluări
- LBII ParametrosDocument37 paginiLBII ParametrosPolinho Donacimento100% (1)
- JD1ADocument3 paginiJD1AKEYURKUMAR100% (3)
- Brushless DC-Servomotors: 2444 ... B SeriesDocument2 paginiBrushless DC-Servomotors: 2444 ... B SeriesDaniel SitumeangÎncă nu există evaluări
- Micromotor DC Serie 2444Document2 paginiMicromotor DC Serie 2444Thymoty-NortusÎncă nu există evaluări
- En 2250 BX4S DFFDocument2 paginiEn 2250 BX4S DFFchinnapol233Încă nu există evaluări
- Brushless DC-Servomotors: Series 0515 ... BDocument2 paginiBrushless DC-Servomotors: Series 0515 ... BBarack ObamaÎncă nu există evaluări
- Faulhaber 1506 SR Ie2-8 DF (Datasheet)Document2 paginiFaulhaber 1506 SR Ie2-8 DF (Datasheet)Near YagamiÎncă nu există evaluări
- En 1717sr DFFDocument1 paginăEn 1717sr DFFIsael CJÎncă nu există evaluări
- Ent Microdebrider 24v b0512n4080 SpecificationsDocument1 paginăEnt Microdebrider 24v b0512n4080 SpecificationsIman AzrbjÎncă nu există evaluări
- DC-Micromotors Series 2233TDocument2 paginiDC-Micromotors Series 2233TAlfandyÎncă nu există evaluări
- Turbo Disc P850/P 852: Stepper MotorDocument1 paginăTurbo Disc P850/P 852: Stepper Motoryuran111Încă nu există evaluări
- EtelDocument2 paginiEtelkatika01Încă nu există evaluări
- 79 P3Document6 pagini79 P3vespoÎncă nu există evaluări
- EC 22 22 MM, Brushless, 50 Watt: Part NumbersDocument1 paginăEC 22 22 MM, Brushless, 50 Watt: Part NumbersfurkanfurkanfurkanÎncă nu există evaluări
- Maxon EC22 50wattDocument1 paginăMaxon EC22 50wattElectromateÎncă nu există evaluări
- DC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525Document1 paginăDC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525NewsUPdateÎncă nu există evaluări
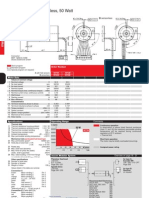
- Maxon EC-Max40 70wattDocument1 paginăMaxon EC-Max40 70wattElectromateÎncă nu există evaluări
- Maxon EC90 Flat 90watt With EncoderDocument1 paginăMaxon EC90 Flat 90watt With EncoderElectromateÎncă nu există evaluări
- Stepper Motors: Series DM40100RDocument2 paginiStepper Motors: Series DM40100RVeiko CastañedaÎncă nu există evaluări
- Maxon EC90 Flat 90wattDocument1 paginăMaxon EC90 Flat 90wattElectromateÎncă nu există evaluări
- 12 156 enDocument1 pagină12 156 enLuka MadridÎncă nu există evaluări
- Catalog Motor EC90Flat 323772Document1 paginăCatalog Motor EC90Flat 323772Lucas SuplinoÎncă nu există evaluări
- Maxon EC60 400wattDocument1 paginăMaxon EC60 400wattElectromateÎncă nu există evaluări
- NX Motors Speed - Torque Performance Curves - ENDocument41 paginiNX Motors Speed - Torque Performance Curves - ENHamed YazidiÎncă nu există evaluări
- Maxon EC6 1.2wattDocument1 paginăMaxon EC6 1.2wattElectromateÎncă nu există evaluări
- Zero-Voltage Switch With Adjustable Ramp T2117: FeaturesDocument15 paginiZero-Voltage Switch With Adjustable Ramp T2117: FeaturesNenad VukovicÎncă nu există evaluări
- Single-Phase Asynchronous Motor: Eg 7120-2 Eg 7140-2 Eg 7150-2Document4 paginiSingle-Phase Asynchronous Motor: Eg 7120-2 Eg 7140-2 Eg 7150-2Ma HdiÎncă nu există evaluări
- NTE3050 Seven Segment LED Display .270 Inch, Common Anode, LHDPDocument3 paginiNTE3050 Seven Segment LED Display .270 Inch, Common Anode, LHDPTarun SharmaÎncă nu există evaluări
- Ecma L1221BR3 PD02 05172016Document2 paginiEcma L1221BR3 PD02 05172016Anil JindalÎncă nu există evaluări
- T2117 Zero-Voltage Switch With Adjustable Ramp PDFDocument16 paginiT2117 Zero-Voltage Switch With Adjustable Ramp PDFnenadÎncă nu există evaluări
- Fast Switching Diode: Lead Free Finish, Rohs Compliant (Note 2)Document2 paginiFast Switching Diode: Lead Free Finish, Rohs Compliant (Note 2)zileÎncă nu există evaluări
- Motores PDFDocument1 paginăMotores PDFJorge Alejandro Barrutia BorbollaÎncă nu există evaluări
- RE50Document1 paginăRE50Yhony Gamarra VargasÎncă nu există evaluări
- Maxon RE25 Precious Metal Brushes 10wattDocument1 paginăMaxon RE25 Precious Metal Brushes 10wattElectromateÎncă nu există evaluări
- En 21 242Document1 paginăEn 21 242Zoltán SoósÎncă nu există evaluări
- En 21 250Document1 paginăEn 21 250compimagmaticÎncă nu există evaluări
- p310 Disc Magnet Stepper Motor DatasheetDocument1 paginăp310 Disc Magnet Stepper Motor Datasheetjunk andshitÎncă nu există evaluări
- Maxon Ec45 136210Document1 paginăMaxon Ec45 136210compimagmaticÎncă nu există evaluări
- Circuito en Fuente TV LCD Mustek N3856VGDocument13 paginiCircuito en Fuente TV LCD Mustek N3856VGAntonio ChavezÎncă nu există evaluări
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDocument1 paginăEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanÎncă nu există evaluări
- En 21 251Document1 paginăEn 21 251Froylan OchoaÎncă nu există evaluări
- Motor Maxon 323772Document1 paginăMotor Maxon 323772Henry Daniel VerdugoÎncă nu există evaluări
- 6N90C Mosfet N PDFDocument10 pagini6N90C Mosfet N PDFHưng HQÎncă nu există evaluări
- 1N5817/1N5818/1N5819 Siyu: Plastic Schottky Barrier RectifierDocument2 pagini1N5817/1N5818/1N5819 Siyu: Plastic Schottky Barrier RectifierJosé Joaquim Braga BragaÎncă nu există evaluări
- MAXON Brushed Motor A-Max 26, 4.5 WDocument1 paginăMAXON Brushed Motor A-Max 26, 4.5 WRadu BabauÎncă nu există evaluări
- Automotive Power Relay: Technical Data For Contact SideDocument3 paginiAutomotive Power Relay: Technical Data For Contact SideStuxnetÎncă nu există evaluări
- Automotive Power Relay: Technical Data For Contact SideDocument3 paginiAutomotive Power Relay: Technical Data For Contact SideStuxnetÎncă nu există evaluări
- Contract Number: PGCB/RRGAS/Phase-4/2020 Dated 20/08/2020 1.2 Disconnectors and Earthing SwitchesDocument2 paginiContract Number: PGCB/RRGAS/Phase-4/2020 Dated 20/08/2020 1.2 Disconnectors and Earthing SwitchesMASUD RANAÎncă nu există evaluări
- Mofet Mosfet Multi Stage AmplifierDocument8 paginiMofet Mosfet Multi Stage AmplifierMohamed AmirÎncă nu există evaluări
- Not For New Design, USE MMBT3904: NPN Small Signal Transistor FeaturesDocument2 paginiNot For New Design, USE MMBT3904: NPN Small Signal Transistor FeaturesRanfis Rojas BorgesÎncă nu există evaluări
- Load On The Fixations and Dynamic Torques Synchronous AlternatorDocument1 paginăLoad On The Fixations and Dynamic Torques Synchronous AlternatorAM76Încă nu există evaluări
- BLDC Motor Ø8 MM: ECX SPEED 8 M BrushlessDocument1 paginăBLDC Motor Ø8 MM: ECX SPEED 8 M BrushlessVinsen Teubun LetsoinÎncă nu există evaluări
- Maxon EC45 Flat 30wattDocument1 paginăMaxon EC45 Flat 30wattElectromateÎncă nu există evaluări
- Datasheet - 160P419209 - Item No 4Document1 paginăDatasheet - 160P419209 - Item No 4wajdyzÎncă nu există evaluări
- Engine PartsDocument28 paginiEngine PartsBrandiece 'Dee Dee' Berry100% (1)
- Service Manual: FD671D/FD711D FD750D FD791D (DFI)Document154 paginiService Manual: FD671D/FD711D FD750D FD791D (DFI)JanÎncă nu există evaluări
- NothingDocument1 paginăNothingJanÎncă nu există evaluări
- NothingDocument1 paginăNothingJanÎncă nu există evaluări
- Nothing Is Here. Hello NothingDocument1 paginăNothing Is Here. Hello NothingJanÎncă nu există evaluări
- TransformerDocument81 paginiTransformerMuluken FilmonÎncă nu există evaluări
- Sevadis Autel MaxiChargerDocument2 paginiSevadis Autel MaxiChargerwmcÎncă nu există evaluări
- Experiment 11Document8 paginiExperiment 11Mihai BogdanÎncă nu există evaluări
- Document 1 WatanabeDocument58 paginiDocument 1 WatanabeHendrik BastiwÎncă nu există evaluări
- DET40073 - Topic 1Document54 paginiDET40073 - Topic 1KuhaanProÎncă nu există evaluări
- ProjectDocument18 paginiProjectTanveer ShariffÎncă nu există evaluări
- CAC Compact Four Way Cassette - R410a Inverter - PDFDocument13 paginiCAC Compact Four Way Cassette - R410a Inverter - PDFFerenc SchmidtÎncă nu există evaluări
- Test Report: No. B40-15-AR-I1Document37 paginiTest Report: No. B40-15-AR-I1anbkhn90Încă nu există evaluări
- Aakash CPP - 2Document43 paginiAakash CPP - 2Rishi Shukla100% (1)
- Parker GVM 310Document16 paginiParker GVM 310namanbhatia505Încă nu există evaluări
- Solar Powered Battery Charging System: Catherine ConaghanDocument71 paginiSolar Powered Battery Charging System: Catherine ConaghanVasantaraj Fbi CriminalÎncă nu există evaluări
- The Maximum Number of Electrons Which The Valence Shell of An Atom Can Have Is (A) 6 (B) 8 (C) 18 (D) 2Document3 paginiThe Maximum Number of Electrons Which The Valence Shell of An Atom Can Have Is (A) 6 (B) 8 (C) 18 (D) 2Raýeęś AhmêðÎncă nu există evaluări
- Donnees Mosfet NTMYS014N06CL - D-2319325Document8 paginiDonnees Mosfet NTMYS014N06CL - D-2319325Philippe GuillemetÎncă nu există evaluări
- Regenerative Electric Power For More Electric Aircraft: Sfoo@fsu - Edu Ibhattacharya@tntech - EduDocument5 paginiRegenerative Electric Power For More Electric Aircraft: Sfoo@fsu - Edu Ibhattacharya@tntech - EduRaniero FalzonÎncă nu există evaluări
- Cisco SFP ModulesDocument7 paginiCisco SFP ModulesCassandra ShafferÎncă nu există evaluări
- EE380 Intro 2016Document13 paginiEE380 Intro 2016rohanÎncă nu există evaluări
- Thesis On Switched Reluctance MotorDocument4 paginiThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- User Manual: Hgm9 810 Genset Parallel (With Genset) UnitDocument65 paginiUser Manual: Hgm9 810 Genset Parallel (With Genset) UnitJanu HimawanÎncă nu există evaluări
- Assignment # 3 CHAPTERS# 1,2,3: CH#1 Answers To Review Qestions SECTION 1.1Document34 paginiAssignment # 3 CHAPTERS# 1,2,3: CH#1 Answers To Review Qestions SECTION 1.1Naheed HameedÎncă nu există evaluări
- DIVAR IP All-In-One 7000 3U Datasheet 51 en 66297110155Document5 paginiDIVAR IP All-In-One 7000 3U Datasheet 51 en 66297110155Javier RochaÎncă nu există evaluări
- Designproject 2 CodeDocument5 paginiDesignproject 2 Codeapi-533012799Încă nu există evaluări
- Assignment No. 1Document1 paginăAssignment No. 1Sharjeel AhmadÎncă nu există evaluări
- 3001 Elex 1Document10 pagini3001 Elex 1DarthRevan23Încă nu există evaluări
- Stepper ArduinoDocument6 paginiStepper ArduinoShahrim MohdÎncă nu există evaluări
- RFID Site SurveyDocument2 paginiRFID Site SurveyAnnie pervaizÎncă nu există evaluări
- Ob3316 PDFDocument12 paginiOb3316 PDFKareka top3Încă nu există evaluări