S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Unit 2 Module 2 Combined-1Document14 paginiUnit 2 Module 2 Combined-1api-2930012170% (2)
- D&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFDocument191 paginiD&D 3.5 Edition - Fiendish Codex I - Hordes of The Abyss PDFIgnacio Peralta93% (15)
- (Biophysical Techniques Series) Iain D. Campbell, Raymond A. Dwek-Biological Spectroscopy - Benjamin-Cummings Publishing Company (1984)Document192 pagini(Biophysical Techniques Series) Iain D. Campbell, Raymond A. Dwek-Biological Spectroscopy - Benjamin-Cummings Publishing Company (1984)BrunoRamosdeLima100% (1)
- Astm C119-16Document8 paginiAstm C119-16Manuel Antonio Santos Vargas100% (2)
- Follow UsDocument1 paginăFollow UsJetmir KurtiÎncă nu există evaluări
- Read MeDocument1 paginăRead MeJetmir KurtiÎncă nu există evaluări
- Ojce20120200002 92292448Document10 paginiOjce20120200002 92292448Jetmir KurtiÎncă nu există evaluări
- Betoni JetiDocument3 paginiBetoni JetiJetmir KurtiÎncă nu există evaluări
- Tabela e Materialeve OKKDocument6 paginiTabela e Materialeve OKKJetmir KurtiÎncă nu există evaluări
- ADocument4 paginiAJetmir KurtiÎncă nu există evaluări
- ADocument4 paginiAJetmir KurtiÎncă nu există evaluări
- 1Document1 pagină1Jetmir KurtiÎncă nu există evaluări
- Matric atDocument1 paginăMatric atJetmir KurtiÎncă nu există evaluări
- Tech SharmitDocument16 paginiTech SharmitRishu SinhaÎncă nu există evaluări
- 3-CHAPTER-1 - Edited v1Document32 pagini3-CHAPTER-1 - Edited v1Michael Jaye RiblezaÎncă nu există evaluări
- ACTIVITY Design - Nutrition MonthDocument7 paginiACTIVITY Design - Nutrition MonthMaria Danica89% (9)
- Group 3 Presenta Tion: Prepared By: Queen Cayell Soyenn Gulo Roilan Jade RosasDocument12 paginiGroup 3 Presenta Tion: Prepared By: Queen Cayell Soyenn Gulo Roilan Jade RosasSeyell DumpÎncă nu există evaluări
- 1 s2.0 S0378432004002465 MainDocument20 pagini1 s2.0 S0378432004002465 MainMuhammad JameelÎncă nu există evaluări
- Mythology GreekDocument8 paginiMythology GreekJeff RamosÎncă nu există evaluări
- Alan Freeman - Ernest - Mandels - Contribution - To - Economic PDFDocument34 paginiAlan Freeman - Ernest - Mandels - Contribution - To - Economic PDFhajimenozakiÎncă nu există evaluări
- CBSE Class 12 Informatics Practices Marking Scheme Term 2 For 2021 22Document6 paginiCBSE Class 12 Informatics Practices Marking Scheme Term 2 For 2021 22Aryan BhardwajÎncă nu există evaluări
- Theory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)Document15 paginiTheory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)International Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- PC300-8 New ModelDocument22 paginiPC300-8 New Modeljacklyn ade putra100% (2)
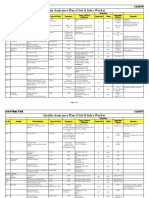
- Quality Assurance Plan - CivilDocument11 paginiQuality Assurance Plan - CivilDeviPrasadNathÎncă nu există evaluări
- DOMESDocument23 paginiDOMESMukthesh ErukullaÎncă nu există evaluări
- JLPT Application Form Method-December 2023Document3 paginiJLPT Application Form Method-December 2023Sajiri KamatÎncă nu există evaluări
- B1 Editable End-of-Year TestDocument6 paginiB1 Editable End-of-Year TestSyahira Mayadi50% (2)
- Qualification of Class Y Flip Chip Cga Package Technology For SpaceDocument8 paginiQualification of Class Y Flip Chip Cga Package Technology For SpacePepe ChorizoÎncă nu există evaluări
- All About History History of Communism - 4th Edition 2022Document148 paginiAll About History History of Communism - 4th Edition 2022Duke100% (1)
- The Story of An Hour QuestionpoolDocument5 paginiThe Story of An Hour QuestionpoolAKM pro player 2019Încă nu există evaluări
- 2015 Grade 4 English HL Test MemoDocument5 pagini2015 Grade 4 English HL Test MemorosinaÎncă nu există evaluări
- Appsc Aee Mains 2019 Electrical Engineering Paper III 1fcbb2c9Document12 paginiAppsc Aee Mains 2019 Electrical Engineering Paper III 1fcbb2c9SURYA PRAKASHÎncă nu există evaluări
- New Regular and Irregular Verb List and Adjectives 1-Ix-2021Document11 paginiNew Regular and Irregular Verb List and Adjectives 1-Ix-2021MEDALITH ANEL HUACRE SICHAÎncă nu există evaluări
- Human Aspect Issues After Mergers and AcquisitionsDocument4 paginiHuman Aspect Issues After Mergers and AcquisitionsA B100% (1)
- Reviewer CSCDocument22 paginiReviewer CSCChristopher CocalÎncă nu există evaluări
- SST Vs BBTDocument7 paginiSST Vs BBTFlaxkikare100% (1)
- Ingres in ReproductionDocument20 paginiIngres in ReproductionKarlÎncă nu există evaluări
- AJ IntroductionDocument31 paginiAJ IntroductiontrollergamehuydkÎncă nu există evaluări
- N164.UCPE12B LANmark - OF - UC - 12x - Singlemode - 9 - 125 - OS2 - PE - BlackDocument2 paginiN164.UCPE12B LANmark - OF - UC - 12x - Singlemode - 9 - 125 - OS2 - PE - BlackRaniaTortueÎncă nu există evaluări