S-ar putea să vă placă și
- Homework 3Document4 paginiHomework 3HyperVoiceÎncă nu există evaluări
- Matlab Tutorial5Document50 paginiMatlab Tutorial5Asterix100% (8)
- Linear Programming With MATLABDocument51 paginiLinear Programming With MATLABTangerine DianeÎncă nu există evaluări
- Computational Laminar Boundary Layer AnalysisDocument25 paginiComputational Laminar Boundary Layer AnalysisHyperVoiceÎncă nu există evaluări
- Ing201e PDFDocument235 paginiIng201e PDFHyperVoiceÎncă nu există evaluări
- Solution Manual of Physics by Arthur BeiserDocument145 paginiSolution Manual of Physics by Arthur BeiserManuull71% (49)
- Engineering Mechanics Dynamics Solution Manual 6th PDFDocument214 paginiEngineering Mechanics Dynamics Solution Manual 6th PDFIsa Gumus80% (89)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
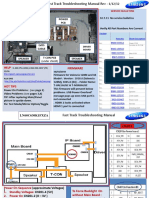
- Samsung LN60C630K1FXZA Fast Track Guide (SM)Document4 paginiSamsung LN60C630K1FXZA Fast Track Guide (SM)Carlos OdilonÎncă nu există evaluări
- PCB & Electronics HardwareDocument84 paginiPCB & Electronics HardwaresciucÎncă nu există evaluări
- Explorer Tech Manual - Rev4Document187 paginiExplorer Tech Manual - Rev4wisrrabtc SilvaÎncă nu există evaluări
- RF & Microwave Design Guide - Sierra Circuits - November 2021Document44 paginiRF & Microwave Design Guide - Sierra Circuits - November 2021Milan Đorđevic100% (1)
- Basic Electronics Practice ExamDocument4 paginiBasic Electronics Practice ExamJames De Los ReyesÎncă nu există evaluări
- ELX-311-MODULE-1 Introduction To ECADDocument4 paginiELX-311-MODULE-1 Introduction To ECADErvert SoteraniaÎncă nu există evaluări
- Daewoo Dlt-20w2 Chassis Sl-140t SMDocument45 paginiDaewoo Dlt-20w2 Chassis Sl-140t SMZdravko RusevÎncă nu există evaluări
- Modeling, Simulation and Reduction Techniques of Electromagnetic Conducted Emission Due To Operation of Power Electronic ConvertersDocument6 paginiModeling, Simulation and Reduction Techniques of Electromagnetic Conducted Emission Due To Operation of Power Electronic ConvertersskrtamilÎncă nu există evaluări
- Kenwood ts-430 AGC ModDocument23 paginiKenwood ts-430 AGC Modmrkris100% (1)
- Yamaha Psre303 Service Manual PDFDocument35 paginiYamaha Psre303 Service Manual PDFelio villalbaÎncă nu există evaluări
- Simple Digital Security System: Detailed DescriptionDocument6 paginiSimple Digital Security System: Detailed DescriptionSatyam TiwariÎncă nu există evaluări
- FDARC X-Phase QRM Eliminator: RelayDocument4 paginiFDARC X-Phase QRM Eliminator: RelayЃорѓи Поп-ЃорѓиевÎncă nu există evaluări
- Vision 2013-06-27 02-16-33Document124 paginiVision 2013-06-27 02-16-33NicuVisanÎncă nu există evaluări
- Mini Project Report (Topic - 3D LED CUBE DISPLAY (8x8x8 Pixels) )Document92 paginiMini Project Report (Topic - 3D LED CUBE DISPLAY (8x8x8 Pixels) )bineeshbhasi0% (2)
- PCB Design Software CADSTAR Board Modeler Lite TutorialDocument92 paginiPCB Design Software CADSTAR Board Modeler Lite TutorialHemanth KumarÎncă nu există evaluări
- Fire Monitering of Farm LandDocument18 paginiFire Monitering of Farm LandRahul GuptaÎncă nu există evaluări
- Harman Kardon AV SMPS PDFDocument11 paginiHarman Kardon AV SMPS PDFbenygiurgiuÎncă nu există evaluări
- Astm D5109 - 1 (En)Document8 paginiAstm D5109 - 1 (En)Rahul SamalaÎncă nu există evaluări
- Canon PC800 900 ServiceManualDocument393 paginiCanon PC800 900 ServiceManualUlmanu ValentinÎncă nu există evaluări
- Error Code For Canon IR4045 AdvanceDocument30 paginiError Code For Canon IR4045 AdvanceRopsonÎncă nu există evaluări
- An Enhanced Detection Method of PCB Defect Based On Improved YOLOv7Document18 paginiAn Enhanced Detection Method of PCB Defect Based On Improved YOLOv7Mostafa A. SliemÎncă nu există evaluări
- FANUC SERVO AMPLIFIER operation and safetyDocument659 paginiFANUC SERVO AMPLIFIER operation and safetyIgnacio Lucero100% (3)
- ST3000 Autopilot Functional TestDocument12 paginiST3000 Autopilot Functional TestOkan Taktakoğlu100% (1)
- Ramsey BS1 - The Bullshooter Endless Loop Voice RecorderDocument20 paginiRamsey BS1 - The Bullshooter Endless Loop Voice RecorderAl PetitÎncă nu există evaluări
- RL 1256Document13 paginiRL 1256Brenno FernandesÎncă nu există evaluări
- Oc 07 ProjectDocument8 paginiOc 07 ProjectEvandro FernandesÎncă nu există evaluări
- The CB100 Conformal Coating Spray BoothDocument3 paginiThe CB100 Conformal Coating Spray BoothLee HitchensÎncă nu există evaluări
- BNPB3830Document72 paginiBNPB3830camb2270100% (1)
- DL24 150W 180W DIY 1000W Installation Manual B VersionDocument1 paginăDL24 150W 180W DIY 1000W Installation Manual B VersionAlex LuzÎncă nu există evaluări
- NCV-Reviewed Information Technology and Computer Science-Level 2-502100401-ISAT-2020Document33 paginiNCV-Reviewed Information Technology and Computer Science-Level 2-502100401-ISAT-2020Nosipho Nosipho92% (13)