S-ar putea să vă placă și
- Transformada Laplace e Inversa PDFDocument23 paginiTransformada Laplace e Inversa PDFAndreea DrăghiciÎncă nu există evaluări
- A1 RevisoMatematica LaplaceDocument21 paginiA1 RevisoMatematica LaplacebrineniziiziÎncă nu există evaluări
- 2021 Ici 1S 04Document4 pagini2021 Ici 1S 04Matheus IsoldiÎncă nu există evaluări
- Aula 02Document25 paginiAula 02Kmi70 Krneir0Încă nu există evaluări
- Reginaldo LaplaceDocument119 paginiReginaldo LaplaceMauricio CalheiroÎncă nu există evaluări
- Nota de Aula - Transf LaplaceDocument19 paginiNota de Aula - Transf LaplaceCicero MelloÎncă nu există evaluări
- Modelagem CircuitosDocument50 paginiModelagem CircuitosJeremias RibeiroÎncă nu există evaluări
- Apostila - Analise de Sistemas LinearesDocument46 paginiApostila - Analise de Sistemas LinearesMendel Tavares PassosÎncă nu există evaluări
- Teoria de Controle ModernoDocument231 paginiTeoria de Controle ModernoValéria Lima Antônio FilhoÎncă nu există evaluări
- Aula 2 - Funções de Excitação - Katia PDFDocument49 paginiAula 2 - Funções de Excitação - Katia PDFMarcos Antonio Arantes de FreitasÎncă nu există evaluări
- AOL 5 - Equações DiferenciaisDocument4 paginiAOL 5 - Equações DiferenciaisIzamara FerreiraÎncă nu există evaluări
- PRO3252 A04 Laplace Formulas e Exercicios 2023Document5 paginiPRO3252 A04 Laplace Formulas e Exercicios 2023Diegocalixtohotmail.com CalixtoÎncă nu există evaluări
- Lista LaplaceDocument2 paginiLista Laplacemarcella4idalyneÎncă nu există evaluări
- 02 Laplace PDFDocument27 pagini02 Laplace PDFNey Jr.Încă nu există evaluări
- Lista 3 - MmaDocument2 paginiLista 3 - MmaRenan Ramos de MoraisÎncă nu există evaluări
- Análise No Domínio Da Frequencia - Série de Fourier 15 04 2019Document34 paginiAnálise No Domínio Da Frequencia - Série de Fourier 15 04 2019Vinicius Campos FantiÎncă nu există evaluări
- 2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciaDocument49 pagini2024 - 04 - Transformada de Laplace - Funà à o de Transferà NciahinnaÎncă nu există evaluări
- 1130-Texto Do Artigo-2275-1-10-20171219Document22 pagini1130-Texto Do Artigo-2275-1-10-20171219Roberto NascimentoÎncă nu există evaluări
- ENG-10933 - Controle de Processos - Aula 08Document15 paginiENG-10933 - Controle de Processos - Aula 08Alessandro JesusÎncă nu există evaluări
- Modelos de ProcessosDocument34 paginiModelos de ProcessosJanaina MaiaÎncă nu există evaluări
- Aula 1Document15 paginiAula 1Gabriela AlcantaraÎncă nu există evaluări
- Controle 02 Transformada de Laplace 2 Por PagDocument17 paginiControle 02 Transformada de Laplace 2 Por PagRegis SoaresÎncă nu există evaluări
- LaplaceDocument18 paginiLaplaceAlexandre SaviniÎncă nu există evaluări
- LAB7 - Freq PrópriaDocument5 paginiLAB7 - Freq PrópriaAllexsandro AraújoÎncă nu există evaluări
- Exercicios 09Document5 paginiExercicios 09matheuslisarteÎncă nu există evaluări
- Transformada de LaplaceDocument6 paginiTransformada de Laplacetamires.bojjisÎncă nu există evaluări
- Lista de Exercicios 3 - Provas Anteriores 2019 1sDocument8 paginiLista de Exercicios 3 - Provas Anteriores 2019 1sCarllos LimmaÎncă nu există evaluări
- Slides TL Am3c 2ºS 2023-2024Document70 paginiSlides TL Am3c 2ºS 2023-2024rui.azevedo2003Încă nu există evaluări
- Aula08ss SlidesDocument22 paginiAula08ss SlidesAndreyÎncă nu există evaluări
- Algebra LinearDocument32 paginiAlgebra LinearfpreisÎncă nu există evaluări
- Transformada de Laplace 0Document44 paginiTransformada de Laplace 0Alexandre AraujoÎncă nu există evaluări
- Transformada de Laplace - Circuitos2Document23 paginiTransformada de Laplace - Circuitos2Pantoja lopesÎncă nu există evaluări
- Aula 02Document15 paginiAula 02Mir4 BritoÎncă nu există evaluări
- Sistemas Dinamicos e Ensaios PraticosDocument5 paginiSistemas Dinamicos e Ensaios PraticosVinícius Moreira SouzaÎncă nu există evaluări
- Aplicacao Do Metodo de RayleighRitz Fundamentos de VibracoesDocument18 paginiAplicacao Do Metodo de RayleighRitz Fundamentos de VibracoeshlsmonteiroÎncă nu există evaluări
- Pendulo Simples Pasco-NovoDocument11 paginiPendulo Simples Pasco-NovoVictorCarvalhoÎncă nu există evaluări
- Aula MóduloXDocument7 paginiAula MóduloXAndreia SemedoÎncă nu există evaluări
- Física I e Cálculo I - 2022Document61 paginiFísica I e Cálculo I - 2022Cristian Alexandre MoraesÎncă nu există evaluări
- KL 1Document5 paginiKL 1David de Almeida FiorilloÎncă nu există evaluări
- Transformada de Laplace e SLITDocument19 paginiTransformada de Laplace e SLITVirgínia TavaresÎncă nu există evaluări
- Controle Continuo 1 PDFDocument18 paginiControle Continuo 1 PDFJeremias Ribeiro100% (1)
- Aula 1Document99 paginiAula 1Danilo Barbosa MelgesÎncă nu există evaluări
- Circuitos de Primeira OrdemDocument14 paginiCircuitos de Primeira Ordemwenderguilherme05Încă nu există evaluări
- 05 AulaDocument6 pagini05 AulaestoicaaescolaÎncă nu există evaluări
- Aula - Indutores - Eletricidade - Magnetismo - 2010Document8 paginiAula - Indutores - Eletricidade - Magnetismo - 2010olivaresneoÎncă nu există evaluări
- MAT0326 - Lista 1Document7 paginiMAT0326 - Lista 1Lucas Lisboa LeãoÎncă nu există evaluări
- Analise 01 20102Document2 paginiAnalise 01 20102mpxisÎncă nu există evaluări
- 2014-15 Teste1 Enunciado Com ForDocument1 pagină2014-15 Teste1 Enunciado Com ForprodbydandiÎncă nu există evaluări
- Aula 1 - Revisão de Conceitos de ElectricidadeDocument117 paginiAula 1 - Revisão de Conceitos de ElectricidadeJacinto NhamposseÎncă nu există evaluări
- Apostila Transformada de Laplace PDFDocument11 paginiApostila Transformada de Laplace PDFMarcelo Lopes VieiraÎncă nu există evaluări
- Teoria de Estudo Do Movimento Periódico de Um Pendulo SimplesDocument2 paginiTeoria de Estudo Do Movimento Periódico de Um Pendulo SimplesGrasielle SantanaÎncă nu există evaluări
- Controle de Processos - Aula 1Document27 paginiControle de Processos - Aula 1Cassio AveiroÎncă nu există evaluări
- Slides Yared Cap9Document29 paginiSlides Yared Cap9EMANUEL FRANCISCO MAGALHAES DE AVILAÎncă nu există evaluări
- Circuitos Eletricos II PDFDocument102 paginiCircuitos Eletricos II PDFThiago P. AmorimÎncă nu există evaluări
- 3.a Aula - Sist. Lineares - Linearização de SistemasDocument51 pagini3.a Aula - Sist. Lineares - Linearização de SistemasFrancisco SantosÎncă nu există evaluări
- Aula 1 - Funções Com Valores VetoriaisDocument13 paginiAula 1 - Funções Com Valores VetoriaisMarkus DämonÎncă nu există evaluări
- Exercicios - Transformada de Laplace PDFDocument6 paginiExercicios - Transformada de Laplace PDFGenilson MBÎncă nu există evaluări
- Análise de Circuito 2Document10 paginiAnálise de Circuito 2Hilário PioÎncă nu există evaluări
- EDB Aula 10Document45 paginiEDB Aula 10Carlos MattielloÎncă nu există evaluări
- HorizontalDocument1 paginăHorizontalJoyceCrisÎncă nu există evaluări
- Produto de Três ValoresDocument1 paginăProduto de Três ValoresJoyceCrisÎncă nu există evaluări
- Lead 110 Catalogo-PecasDocument94 paginiLead 110 Catalogo-PecasHerbert Cândido dos Santos50% (2)
- Tintas para FundiçãoDocument9 paginiTintas para FundiçãoarthurschmitzÎncă nu există evaluări
- Livros de Engenharia de SoftwareDocument1 paginăLivros de Engenharia de SoftwareJoyceCrisÎncă nu există evaluări
- Aula de Excel - Concatenar PalavrasDocument1 paginăAula de Excel - Concatenar PalavrasJoyceCrisÎncă nu există evaluări
- Exercício Excel - Soma e SubtraçãoDocument1 paginăExercício Excel - Soma e SubtraçãoJoyceCrisÎncă nu există evaluări
- Soma de Três ValoresDocument1 paginăSoma de Três ValoresJoyceCrisÎncă nu există evaluări
- ProjectDocument104 paginiProjectCleiber SantosÎncă nu există evaluări
- Tolerâncias Dimensionais em Conjuntos DinâmicosDocument150 paginiTolerâncias Dimensionais em Conjuntos DinâmicosGabrielÎncă nu există evaluări
- ABNT NBR ISO 9000 Sistemas de Gestao DaDocument65 paginiABNT NBR ISO 9000 Sistemas de Gestao DaDani AlmeidaÎncă nu există evaluări
- Subtração de Três ValoresDocument1 paginăSubtração de Três ValoresJoyceCrisÎncă nu există evaluări
- PG Ceep 2014 1 06Document54 paginiPG Ceep 2014 1 06JoyceCrisÎncă nu există evaluări
- Grade Eletrica Facens 2018-1Document1 paginăGrade Eletrica Facens 2018-1JoyceCrisÎncă nu există evaluări
- Tabela de Custos Hora MaquinaDocument2 paginiTabela de Custos Hora Maquinabrunofrezarin80% (25)
- Minicurso PCI PDFDocument15 paginiMinicurso PCI PDFJoyceCrisÎncă nu există evaluări
- Tabela Espessura Chapas FinasDocument1 paginăTabela Espessura Chapas FinasAlessandro UrendaÎncă nu există evaluări
- Planilha de Soma SimplesDocument1 paginăPlanilha de Soma SimplesJoyceCrisÎncă nu există evaluări
- Disser Ta CaoDocument103 paginiDisser Ta CaoRafael LatiniÎncă nu există evaluări
- Decimal para HexaDocument1 paginăDecimal para HexaJoyceCrisÎncă nu există evaluări
- Capitulo de Amostra Lean PLDocument24 paginiCapitulo de Amostra Lean PLSulamita CunhaÎncă nu există evaluări
- Tabela de Valores Cobrados InformáticaDocument3 paginiTabela de Valores Cobrados InformáticaJoyceCrisÎncă nu există evaluări
- Decimal para BinárioDocument1 paginăDecimal para BinárioJoyceCrisÎncă nu există evaluări
- Volume ParalelepípedoDocument1 paginăVolume ParalelepípedoJoyceCrisÎncă nu există evaluări
- Decimal para BinárioDocument1 paginăDecimal para BinárioJoyceCrisÎncă nu există evaluări
- Área QuadradoDocument1 paginăÁrea QuadradoJoyceCrisÎncă nu există evaluări
- DIVISÃODocument1 paginăDIVISÃOJoyceCrisÎncă nu există evaluări
- Volume de Um ConeDocument1 paginăVolume de Um ConeJoyceCrisÎncă nu există evaluări
- Prática GA Buck e BoostDocument5 paginiPrática GA Buck e BoostFelipe SteinÎncă nu există evaluări
- Retificação 1 Da Revisão 3Document42 paginiRetificação 1 Da Revisão 3Tiago AlbuquerqueÎncă nu există evaluări
- TC L32u5bDocument30 paginiTC L32u5bLuiz Previato50% (2)
- Delta PDFDocument7 paginiDelta PDFJosé Carlos SimõesÎncă nu există evaluări
- O Pré AmplificadorDocument4 paginiO Pré AmplificadorNobertoMonteiroNP100% (1)
- Módulo 02 - Chave Fusível IndicadoraDocument22 paginiMódulo 02 - Chave Fusível IndicadoraWendell JuniorÎncă nu există evaluări
- Projecto de Linha de Alta Tensão - Estudo Do Comportamento Elétrico PDFDocument119 paginiProjecto de Linha de Alta Tensão - Estudo Do Comportamento Elétrico PDFOsmir M. TupanÎncă nu există evaluări
- Capitulo 3 Aerogeradores Rev 04Document25 paginiCapitulo 3 Aerogeradores Rev 04Fernando SilvaÎncă nu există evaluări
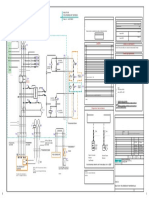
- QDF - Multix B - Polydoros 30-55kw Rev.a23Document1 paginăQDF - Multix B - Polydoros 30-55kw Rev.a23jorgeÎncă nu există evaluări
- Simulado NR-10 BásicoDocument16 paginiSimulado NR-10 BásicoAnonymous B1XiVGsyol100% (3)
- Tensão de Flutuação DCDocument4 paginiTensão de Flutuação DCGabriel AlvesÎncă nu există evaluări
- Aula 7 - Sensoriamento e InstrumentaçãoDocument65 paginiAula 7 - Sensoriamento e InstrumentaçãoAriel TonÎncă nu există evaluări
- Laudo Técnico de Avaliação Da Instalação Elétrica Da Escola Estadual Efigênia Alves - JEDocument31 paginiLaudo Técnico de Avaliação Da Instalação Elétrica Da Escola Estadual Efigênia Alves - JEDa Barraca Vieira100% (1)
- 1 - Apresentação - Arranjo de SubestaçõesDocument128 pagini1 - Apresentação - Arranjo de SubestaçõesSamuel SantosÎncă nu există evaluări
- Planilha de Cálculo de Dimencionamento Da Instalação Elétrica de Uma FábricaDocument17 paginiPlanilha de Cálculo de Dimencionamento Da Instalação Elétrica de Uma FábricaNathália CadeteÎncă nu există evaluări
- Manual NR-10Document276 paginiManual NR-10Marcio Dos Santos ScavassaÎncă nu există evaluări
- No66001br2aed3 Peças ReposiçãoDocument842 paginiNo66001br2aed3 Peças ReposiçãoJodiel ManoelÎncă nu există evaluări
- Motores Inducao Trifasico MIT PDFDocument19 paginiMotores Inducao Trifasico MIT PDFdecioadmi6105Încă nu există evaluări
- Fatura CelescDocument1 paginăFatura CelescCris Leani LimaÎncă nu există evaluări
- Hitachi - Ihcat-Rcuag002 Rev02 Dez2004Document55 paginiHitachi - Ihcat-Rcuag002 Rev02 Dez2004cbmanaus100% (1)
- Certificado Eletropoll Da Linha ZK2L-TECH - R1Document5 paginiCertificado Eletropoll Da Linha ZK2L-TECH - R1isaacsavioÎncă nu există evaluări
- POP 068 - Realizar Manutenção de LV de RD Com Equipe Formada Por 02 Ou Mais Colaboradores Nas Tensões Até 36kV - R3Document26 paginiPOP 068 - Realizar Manutenção de LV de RD Com Equipe Formada Por 02 Ou Mais Colaboradores Nas Tensões Até 36kV - R3Felipe José Lucena de AraujoÎncă nu există evaluări
- Apostila 1-Questões de TransformadoresDocument9 paginiApostila 1-Questões de TransformadoresAlan CoelhoÎncă nu există evaluări
- Relé Estado Solido - ContempDocument1 paginăRelé Estado Solido - ContemparlindomatosÎncă nu există evaluări
- 4 - TIG 200P DIGITAL (Atualização 1)Document13 pagini4 - TIG 200P DIGITAL (Atualização 1)INTERPLASMA CORTE E SOLDAÎncă nu există evaluări
- Catenária Básica 25 KV - 50 HZDocument99 paginiCatenária Básica 25 KV - 50 HZGeopatarecaÎncă nu există evaluări
- Catalogo Geral - Rev-02 - 2013 ZilmerDocument47 paginiCatalogo Geral - Rev-02 - 2013 ZilmerMarcos ResalÎncă nu există evaluări
- Relatório: Acionamentos Elétricos de MotoresDocument22 paginiRelatório: Acionamentos Elétricos de MotoresCarla Ferreira100% (3)
- O Que É FusívelDocument7 paginiO Que É FusívelMarcantoni TavaresÎncă nu există evaluări
- WEG Alternador Sincrono Linha G Plus 50013799 Catalogo Portugues BRDocument36 paginiWEG Alternador Sincrono Linha G Plus 50013799 Catalogo Portugues BRriquemaÎncă nu există evaluări