S-ar putea să vă placă și
- Understanding a Nautical Chart: A Practical Guide to Safe NavigationDe la EverandUnderstanding a Nautical Chart: A Practical Guide to Safe NavigationEvaluare: 3 din 5 stele3/5 (1)
- Ship Speed LogDocument32 paginiShip Speed Logcaptpkkhare100% (1)
- DAY 10 Electronic Speed LogDocument51 paginiDAY 10 Electronic Speed LogSto Cu100% (4)
- Speed LogDocument23 paginiSpeed LogSwapnil Suhrid Joshi60% (5)
- Bridge EquipmentsDocument21 paginiBridge EquipmentsVineet Kumar100% (1)
- Gyro TheoryDocument9 paginiGyro Theorysuranga1568100% (1)
- Orals MetDocument3 paginiOrals MetcaptyashpalÎncă nu există evaluări
- Passage Planning Guideline For Oceangoing Cargo ShipsDocument4 paginiPassage Planning Guideline For Oceangoing Cargo ShipsGerald Handerson100% (2)
- Monthly Routeing ChartDocument1 paginăMonthly Routeing Chartshivajinarvekar50% (2)
- ROTIDocument7 paginiROTIcaptyashpalÎncă nu există evaluări
- Passage PlanningDocument14 paginiPassage PlanningJonieLachica100% (2)
- Ship Magnetism by KPKDocument3 paginiShip Magnetism by KPKFunmela Khan80% (5)
- EM LogDocument3 paginiEM Logcaptyashpal100% (4)
- Unit 2 - Compass CorrectionDocument81 paginiUnit 2 - Compass CorrectionUtpal Kant100% (2)
- Loadicator 1229Document4 paginiLoadicator 1229Nilesh DalviÎncă nu există evaluări
- Letter FlagsDocument6 paginiLetter FlagsAnamaria Daniela100% (1)
- Oral Loo 22Document3 paginiOral Loo 22api-19970189Încă nu există evaluări
- Loadicator Requirements Test Documents PDFDocument6 paginiLoadicator Requirements Test Documents PDFMariner's Circle100% (1)
- 1 (1) - Marine InstrumentsDocument51 pagini1 (1) - Marine InstrumentsMin Minkyaw100% (2)
- Chart Projections PDFDocument2 paginiChart Projections PDFNikhil ReddyÎncă nu există evaluări
- Radar Plotting NotesDocument13 paginiRadar Plotting NotesThapliyal SanjayÎncă nu există evaluări
- Interaction: Bow, A Negative Pressure Near To Amidships and Another, But NotDocument5 paginiInteraction: Bow, A Negative Pressure Near To Amidships and Another, But NotBharatiyulamÎncă nu există evaluări
- Magnetic Compass 1Document4 paginiMagnetic Compass 1Naman ChaturvediÎncă nu există evaluări
- ROTIDocument4 paginiROTIcaptyashpal100% (1)
- 4 - ManevraDocument44 pagini4 - ManevraIulian Sandru100% (1)
- Auto PilotDocument9 paginiAuto PilotKaruna LakhaniÎncă nu există evaluări
- 15 Precise PilotingDocument32 pagini15 Precise PilotingErnestoDom100% (3)
- Ship HandlngDocument2 paginiShip HandlngcaptyashpalÎncă nu există evaluări
- Ror (20791)Document60 paginiRor (20791)Aamir Sirohi100% (2)
- CHST - Reefer Cargo and Cargoes That May LiquefyDocument50 paginiCHST - Reefer Cargo and Cargoes That May LiquefyROSAN FURIOUSÎncă nu există evaluări
- Part 18-Grain, Damage Control PlanDocument5 paginiPart 18-Grain, Damage Control Planaungthein_san100% (1)
- Voyage PlanningDocument21 paginiVoyage PlanningmentepositivaÎncă nu există evaluări
- The Nautical Institute - Interaction ManoueveringDocument22 paginiThe Nautical Institute - Interaction ManoueveringClaudio MF100% (1)
- NAV 3 Lesson 3 Set and DriftDocument15 paginiNAV 3 Lesson 3 Set and DriftMico SantosÎncă nu există evaluări
- OOW Oral - July 2011Document5 paginiOOW Oral - July 2011Lau EscamillaÎncă nu există evaluări
- Magnetic Compass - Oral COCDocument10 paginiMagnetic Compass - Oral COCNaeem100% (1)
- What Is A Tropical Revolving Storm (TRS)Document58 paginiWhat Is A Tropical Revolving Storm (TRS)Diwakar SinghÎncă nu există evaluări
- BEQ Consolidated PDFDocument117 paginiBEQ Consolidated PDFShiv RanjanÎncă nu există evaluări
- Determining Compass Errors and Their CorrectionsDocument28 paginiDetermining Compass Errors and Their CorrectionsMaster Irvin100% (2)
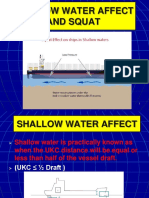
- 3-3 Shallow Water Effect and SquatDocument24 pagini3-3 Shallow Water Effect and SquatAykut Başdan100% (6)
- DefinitionsDocument4 paginiDefinitionssaif100% (1)
- Function 1 Question SetDocument5 paginiFunction 1 Question SetNikhil BhattÎncă nu există evaluări
- How To Mark No Go AreasDocument3 paginiHow To Mark No Go AreasGerald Handerson100% (2)
- VDRDocument6 paginiVDRcaptyashpal67% (3)
- Stability SqaDocument20 paginiStability SqaSujeet sharma100% (1)
- Magnetic Compass PDFDocument19 paginiMagnetic Compass PDFHashil Naseer100% (1)
- Capt. IVR Function-1Document6 paginiCapt. IVR Function-1Jagjit Singh100% (1)
- Function 1 OralsDocument71 paginiFunction 1 OralsTojo T VargheseÎncă nu există evaluări
- Tonnage MeasurementDocument5 paginiTonnage Measurementbhaswath2000Încă nu există evaluări
- 0.situation RorDocument50 pagini0.situation RorAbu Syeed Md. Aurangzeb Al Masum100% (2)
- 09 Magnetic Gyro CompassDocument36 pagini09 Magnetic Gyro CompassDipak Kumar Dey100% (3)
- Buoyage SystemDocument5 paginiBuoyage SystemSandipanBiswas100% (1)
- CPT Sundaram and Pandian Faq Chief MateDocument12 paginiCPT Sundaram and Pandian Faq Chief MatePrashanth Arumugam100% (1)
- Ship Handling - Squat & Shallow WaterDocument12 paginiShip Handling - Squat & Shallow WaterMohit AnandÎncă nu există evaluări
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersDe la EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersEvaluare: 5 din 5 stele5/5 (1)
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesDe la EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesEvaluare: 5 din 5 stele5/5 (3)
- Oral Preparation Watch Keeper Deck Mates: Question and Answer GuidelinesDe la EverandOral Preparation Watch Keeper Deck Mates: Question and Answer GuidelinesEvaluare: 5 din 5 stele5/5 (1)
- Marine Radio Operator Permit Manual: Pass Your Marine Operator Permit ExamDe la EverandMarine Radio Operator Permit Manual: Pass Your Marine Operator Permit ExamÎncă nu există evaluări
- Index SOLAS Chapter II-IDocument5 paginiIndex SOLAS Chapter II-IRokhmatuSivaÎncă nu există evaluări
- 101 Bodyweight ExercisesDocument3 pagini101 Bodyweight Exercisesss_tayadeÎncă nu există evaluări
- Solas III Reg20 Amended by Msc82Document4 paginiSolas III Reg20 Amended by Msc82hamido44Încă nu există evaluări
- 8 Fat Burning Hiit Workouts You Can Do AnywhereDocument9 pagini8 Fat Burning Hiit Workouts You Can Do Anywheress_tayadeÎncă nu există evaluări
- Executive Summary:: International Maritime OrganizationDocument4 paginiExecutive Summary:: International Maritime Organizationss_tayadeÎncă nu există evaluări
- MS Act 1958Document173 paginiMS Act 1958ss_tayadeÎncă nu există evaluări
- Ship Construction Dylan FernandesDocument4 paginiShip Construction Dylan Fernandesss_tayadeÎncă nu există evaluări
- !! First Minute Impression !! CallDocument4 pagini!! First Minute Impression !! Callss_tayadeÎncă nu există evaluări
- Read MeDocument1 paginăRead Mess_tayadeÎncă nu există evaluări
- Position Lines PDFDocument13 paginiPosition Lines PDFAgung Jr TeamElite ScreatCommunityÎncă nu există evaluări
- ASTM TableDocument10 paginiASTM Tabless_tayadeÎncă nu există evaluări
- Catalogue 2016Document29 paginiCatalogue 2016ss_tayade100% (1)
- 8 - Keyboard Shortcuts in Photoshop Printable HandoutDocument2 pagini8 - Keyboard Shortcuts in Photoshop Printable HandoutVenkob NayakÎncă nu există evaluări
- Camera Settings For Concert Photography BeginnersDocument22 paginiCamera Settings For Concert Photography Beginnersss_tayadeÎncă nu există evaluări
- Engine Rooms Fire Safety - Fire-Extinguishing System RequirementsDocument7 paginiEngine Rooms Fire Safety - Fire-Extinguishing System Requirementsss_tayadeÎncă nu există evaluări
- Emergencies Errol FernandesDocument14 paginiEmergencies Errol Fernandesss_tayade100% (1)
- Ship Construction Notes by Dylan FernandesDocument51 paginiShip Construction Notes by Dylan Fernandesss_tayadeÎncă nu există evaluări
- Drill PlanDocument1 paginăDrill Planss_tayadeÎncă nu există evaluări
- Bunker Ing ChecklistDocument3 paginiBunker Ing Checklistss_tayadeÎncă nu există evaluări
- Bridgewatchkeeping Dylan FernandesDocument46 paginiBridgewatchkeeping Dylan Fernandesss_tayade100% (1)
- ISPSDocument14 paginiISPSss_tayadeÎncă nu există evaluări
- Communication AssertivenessDocument3 paginiCommunication Assertivenessss_tayadeÎncă nu există evaluări
- Enhancing Situational AwarenessDocument36 paginiEnhancing Situational Awarenessss_tayadeÎncă nu există evaluări
- Chart 5047Document50 paginiChart 5047ss_tayade100% (1)
- Rate of Turn Indicator NotesDocument5 paginiRate of Turn Indicator Notesss_tayade75% (4)
- Ship Construction Notes by Dylan FernandesDocument51 paginiShip Construction Notes by Dylan Fernandesss_tayadeÎncă nu există evaluări
- COSWPDocument18 paginiCOSWPss_tayadeÎncă nu există evaluări
- Turning Circle NotesDocument6 paginiTurning Circle Notesss_tayadeÎncă nu există evaluări
- Bridge Resource ManagementDocument3 paginiBridge Resource Managementss_tayadeÎncă nu există evaluări
- MMW SyllabusDocument13 paginiMMW SyllabusBien TecsonÎncă nu există evaluări
- Project Proposal - Hospital Management SystemDocument20 paginiProject Proposal - Hospital Management SystemDilanka Liyanage95% (19)
- HLR BasicsDocument13 paginiHLR BasicsAyan Chakraborty75% (4)
- DhamanDocument20 paginiDhamanAman BrarÎncă nu există evaluări
- Spouses Benatiro V CuyosDocument1 paginăSpouses Benatiro V CuyosAleli BucuÎncă nu există evaluări
- Emasry@iugaza - Edu.ps: Islamic University of Gaza Statistics and Probability For Engineers ENCV 6310 InstructorDocument2 paginiEmasry@iugaza - Edu.ps: Islamic University of Gaza Statistics and Probability For Engineers ENCV 6310 InstructorMadhusudhana RaoÎncă nu există evaluări
- NO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Document1 paginăNO KEY Synonyms-And-Antonyms-Describing-Character-Grammar-Drills-Wordsearches - 81561Helena MariñoÎncă nu există evaluări
- A Journey To SomnathDocument8 paginiA Journey To SomnathUrmi RavalÎncă nu există evaluări
- Relative Plate Motion:: Question # Difference Between Relative Plate Motion and Absolute Plate Motion and ApparentDocument9 paginiRelative Plate Motion:: Question # Difference Between Relative Plate Motion and Absolute Plate Motion and ApparentGet TipsÎncă nu există evaluări
- Oracle Partitioned TablesDocument38 paginiOracle Partitioned TablesshahbazbÎncă nu există evaluări
- Dwnload Full Social Psychology 4th Edition Gilovich Test Bank PDFDocument35 paginiDwnload Full Social Psychology 4th Edition Gilovich Test Bank PDFalilonghidotardlyq71i7f100% (8)
- Safety Awareness TrainingDocument20 paginiSafety Awareness TrainingPl nagappanÎncă nu există evaluări
- 2nd YearDocument46 pagini2nd YearRajnish DeoÎncă nu există evaluări
- 1.introduction To Narratology. Topic 1 ColipcaDocument21 pagini1.introduction To Narratology. Topic 1 ColipcaAnishoara CaldareÎncă nu există evaluări
- Condition Monitoring 021711 v3Document40 paginiCondition Monitoring 021711 v3Kevin_IÎncă nu există evaluări
- Suitcase Lady Christie Mclaren ThesisDocument7 paginiSuitcase Lady Christie Mclaren ThesisWriteMyPaperForMeCheapNewHaven100% (2)
- Page 1 of 15 Vincent Balentino T. Batadlan RcrimDocument15 paginiPage 1 of 15 Vincent Balentino T. Batadlan RcrimJomarÎncă nu există evaluări
- Systematic Survey On Smart Home Safety and Security Systems Using The Arduino PlatformDocument24 paginiSystematic Survey On Smart Home Safety and Security Systems Using The Arduino PlatformGeri MaeÎncă nu există evaluări
- Brahm Dutt v. UoiDocument3 paginiBrahm Dutt v. Uoiswati mohapatraÎncă nu există evaluări
- A N S W e R-Accion PublicianaDocument9 paginiA N S W e R-Accion PublicianaEdward Rey EbaoÎncă nu există evaluări
- The Oldest Man - Made Structures On EarthDocument5 paginiThe Oldest Man - Made Structures On EarthDoug Hoseck100% (1)
- Unit 9Document3 paginiUnit 9LexÎncă nu există evaluări
- Maxima Book Chapter 4Document43 paginiMaxima Book Chapter 4prakush_prakushÎncă nu există evaluări
- Degenesis Rebirth Edition - Interview With Marko DjurdjevicDocument5 paginiDegenesis Rebirth Edition - Interview With Marko DjurdjevicfoxtroutÎncă nu există evaluări
- RCBC Capital Corporation Vs Banco de OroDocument18 paginiRCBC Capital Corporation Vs Banco de OroLove HatredÎncă nu există evaluări
- O Level Physics QuestionsDocument9 paginiO Level Physics QuestionsMichael Leung67% (3)
- Schedule Standard and Syllabus: Section A: Geomorphology and Remote SensingDocument6 paginiSchedule Standard and Syllabus: Section A: Geomorphology and Remote SensingPankaj SharmaÎncă nu există evaluări
- Financing The New VentureDocument46 paginiFinancing The New VentureAnisha HarshÎncă nu există evaluări
- Las Grade 7Document16 paginiLas Grade 7Badeth Ablao67% (3)
- Disseminated Tuberculosis in An AIDS/HIV-Infected Patient: AbstractDocument3 paginiDisseminated Tuberculosis in An AIDS/HIV-Infected Patient: AbstractAmelia Fitria DewiÎncă nu există evaluări