S-ar putea să vă placă și
- 04 N52 EngineDocument63 pagini04 N52 Enginejuherpar100% (3)
- LPW 100Document394 paginiLPW 100gantuya battulga100% (5)
- Pth50 Series: Service + Parts ManualDocument34 paginiPth50 Series: Service + Parts ManualCergey100% (1)
- Pumps Manual WaukashaDocument153 paginiPumps Manual WaukashaSaber Abdel MoreidÎncă nu există evaluări
- CMS Mudlogging Unit Introduction Botta 2018-9 PDFDocument34 paginiCMS Mudlogging Unit Introduction Botta 2018-9 PDFCharles AlvaresÎncă nu există evaluări
- Incompressible Flow Turbomachines: Design, Selection, Applications, and TheoryDe la EverandIncompressible Flow Turbomachines: Design, Selection, Applications, and TheoryÎncă nu există evaluări
- Power Electronics Design: A Practitioner's GuideDe la EverandPower Electronics Design: A Practitioner's GuideEvaluare: 4.5 din 5 stele4.5/5 (3)
- High Voltage DC TransmissionDocument50 paginiHigh Voltage DC TransmissionAnith Krishnan95% (19)
- Tl494 App ReportDocument31 paginiTl494 App ReportGamal YonesÎncă nu există evaluări
- Comoros Study 170608222938Document123 paginiComoros Study 170608222938ABDELOUAHEB HAMIDIÎncă nu există evaluări
- Variable Speed Pumping: A Guide to Successful ApplicationsDe la EverandVariable Speed Pumping: A Guide to Successful ApplicationsEvaluare: 3 din 5 stele3/5 (2)
- S06 THC 560 Axera 5Document104 paginiS06 THC 560 Axera 5Anonymous iu95trpxN100% (1)
- 1 - 5 - Over Travel - Under Travel and Fo - SKR and N - NoDocument31 pagini1 - 5 - Over Travel - Under Travel and Fo - SKR and N - NoRodrigo DacolÎncă nu există evaluări
- Column PipingDocument25 paginiColumn Pipingscribd_alphaÎncă nu există evaluări
- Alarm and Trouble ShootingDocument20 paginiAlarm and Trouble ShootingENGHUSSEIN78100% (5)
- 608e Design Pipe Systems Pumps 05 2012Document56 pagini608e Design Pipe Systems Pumps 05 2012Freddy Virgo100% (1)
- Pool PakDocument191 paginiPool PakDhirendra Singh Rathore100% (2)
- Application of Optimal Control Theory to Enhanced Oil RecoveryDe la EverandApplication of Optimal Control Theory to Enhanced Oil RecoveryEvaluare: 4.5 din 5 stele4.5/5 (3)
- Pump Control System Automation - KSBDocument76 paginiPump Control System Automation - KSBmask98Încă nu există evaluări
- Kiln Gear Ring Oil Automatic SprayDocument78 paginiKiln Gear Ring Oil Automatic SprayAdi IrpaiÎncă nu există evaluări
- PRO II 8.0 Unit Operations - Reference ManualDocument350 paginiPRO II 8.0 Unit Operations - Reference ManualJuan Jose SossaÎncă nu există evaluări
- Compression Packing GuideDocument28 paginiCompression Packing Guidemanmohansingh1999Încă nu există evaluări
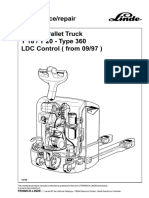
- Linde T20 /131 ManualDocument63 paginiLinde T20 /131 Manualalan mad100% (2)
- Part I Turbopumps (Rappels) Introduction To TurbopumpsDocument4 paginiPart I Turbopumps (Rappels) Introduction To TurbopumpsHunt MarkÎncă nu există evaluări
- Grandall David January2010Document137 paginiGrandall David January2010Emerson MazzaroloÎncă nu există evaluări
- Internal Gear Pumps: Series QXDocument32 paginiInternal Gear Pumps: Series QXtecnicomanelÎncă nu există evaluări
- Kacher B80WDocument111 paginiKacher B80WAnh Minh NguyenÎncă nu există evaluări
- Pump Types, 1: Chapter - OneDocument8 paginiPump Types, 1: Chapter - Oneosman abuzaidÎncă nu există evaluări
- FULLTEXT01Document117 paginiFULLTEXT01UNsha bee komÎncă nu există evaluări
- Flotronic System Manager: Application GuideDocument89 paginiFlotronic System Manager: Application GuideHafiani HichamÎncă nu există evaluări
- Fluid Machinery Lecture Notes PDFDocument74 paginiFluid Machinery Lecture Notes PDFMark Angelo UyÎncă nu există evaluări
- TDI Injection and Glow Plug System 4-Cyl 2 0 LTR 4-Valve Common RailDocument77 paginiTDI Injection and Glow Plug System 4-Cyl 2 0 LTR 4-Valve Common RailergdegÎncă nu există evaluări
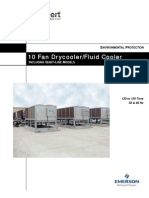
- Manual Tecnico Drycooler EmersonDocument44 paginiManual Tecnico Drycooler EmersonAnonymous wuBvdwÎncă nu există evaluări
- 10 Fan DrycoolerDocument36 pagini10 Fan DrycoolersamersibaniÎncă nu există evaluări
- SL 18057 15Document88 paginiSL 18057 15Ahmet KuruÎncă nu există evaluări
- Vtrlucas Notes DC DriveDocument16 paginiVtrlucas Notes DC DriveSyamKumarNÎncă nu există evaluări
- Bomba Cal 1266Document113 paginiBomba Cal 1266Ronal Opazo SalazarÎncă nu există evaluări
- Engine-CAHA-TDI Injection and Glow Plug System (4-Cyl 2 0 LTR 4-ValveDocument78 paginiEngine-CAHA-TDI Injection and Glow Plug System (4-Cyl 2 0 LTR 4-ValveCatalin UrsachiÎncă nu există evaluări
- Sloa 013 ADocument26 paginiSloa 013 AKkk lllÎncă nu există evaluări
- Proportional Directional Valve System: in Sectional Design Series SC 12Document64 paginiProportional Directional Valve System: in Sectional Design Series SC 12Yulianto JoeÎncă nu există evaluări
- 5w PDFDocument211 pagini5w PDFJuan Marcelo Rodriguez PereyraÎncă nu există evaluări
- CSD 2023Document34 paginiCSD 2023hung kungÎncă nu există evaluări
- Designing Switching Voltage Regulators With The TL494: Patrick Griffith Standard Linear & LogicDocument31 paginiDesigning Switching Voltage Regulators With The TL494: Patrick Griffith Standard Linear & LogicChulinoÎncă nu există evaluări
- Fulltext01 PDFDocument57 paginiFulltext01 PDFIfan Seven SeasÎncă nu există evaluări
- BR 4540Document127 paginiBR 4540ElizaÎncă nu există evaluări
- Arjo Huntleigh Flowtron Universal DVT Pump - Service ManualDocument116 paginiArjo Huntleigh Flowtron Universal DVT Pump - Service ManualsambadeeÎncă nu există evaluări
- Ucc3842 App Note PDFDocument19 paginiUcc3842 App Note PDFRakesh RakeeÎncă nu există evaluări
- 02b557b7f364abc Ek PLLDocument99 pagini02b557b7f364abc Ek PLLParth RamanujÎncă nu există evaluări
- Controlador Zapimos FamilyDocument66 paginiControlador Zapimos Familyvictor laraÎncă nu există evaluări
- Licenta MecanicaDocument98 paginiLicenta MecanicaIonel AlexandruÎncă nu există evaluări
- Casino ManualDocument266 paginiCasino ManualJustin BrockÎncă nu există evaluări
- Master Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranDocument97 paginiMaster Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranhieuhuechÎncă nu există evaluări
- Circuit Description Board4 0 DocV1 3Document38 paginiCircuit Description Board4 0 DocV1 3CONG TRAN NGOCÎncă nu există evaluări
- Internal Gear Pumps: Series QXDocument32 paginiInternal Gear Pumps: Series QXfadhlidzilÎncă nu există evaluări
- Emerson Cooling SystemDocument140 paginiEmerson Cooling SystempoetoetÎncă nu există evaluări
- Designing Switching Voltage Regulators With The TL494: Patrick Griffith Standard Linear & LogicDocument31 paginiDesigning Switching Voltage Regulators With The TL494: Patrick Griffith Standard Linear & LogicDpgsÎncă nu există evaluări
- BE InstallGuide RooftopSeries12R ZXDocument80 paginiBE InstallGuide RooftopSeries12R ZXAlexandreau del FierroÎncă nu există evaluări
- KibarwalaDocument68 paginiKibarwalaAhmad TahirÎncă nu există evaluări
- MacRoy G PDFDocument60 paginiMacRoy G PDFJuan Pablo NavasÎncă nu există evaluări
- Intro PDFDocument38 paginiIntro PDFmori hartantoÎncă nu există evaluări
- R-410A J ZH Series W/Smart Equipment™: 3 - 5 Ton 60 HertzDocument66 paginiR-410A J ZH Series W/Smart Equipment™: 3 - 5 Ton 60 HertzjalanÎncă nu există evaluări
- Oi - 266hart en K 05 - 2016Document76 paginiOi - 266hart en K 05 - 2016barryÎncă nu există evaluări
- Manual Tecnico Acrp100Document56 paginiManual Tecnico Acrp100Juan CarlosÎncă nu există evaluări
- Internal Gear PumpsDocument32 paginiInternal Gear PumpsHongwei Guan100% (1)
- Rf2D ReferenceManual QGIS EN2023Document320 paginiRf2D ReferenceManual QGIS EN2023Cayo LopesÎncă nu există evaluări
- Operation and Installation Manual Small Volume ProverDocument72 paginiOperation and Installation Manual Small Volume Proverdrejas100% (2)
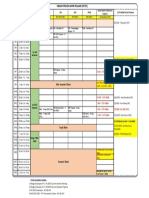
- 4.0 Senarai Calon Hadiah Kecemerlangan AkademikDocument2 pagini4.0 Senarai Calon Hadiah Kecemerlangan AkademikAin KaloiÎncă nu există evaluări
- 4131-Article Text-7918-1-10-20201227Document10 pagini4131-Article Text-7918-1-10-20201227Ain KaloiÎncă nu există evaluări
- USYS 2022 Program BookDocument7 paginiUSYS 2022 Program BookAin KaloiÎncă nu există evaluări
- Paper1889 PDFDocument12 paginiPaper1889 PDFAin KaloiÎncă nu există evaluări
- Poster Kursus SPPT BiDocument2 paginiPoster Kursus SPPT BiAin KaloiÎncă nu există evaluări
- Poster Kursus SPPT - BMDocument2 paginiPoster Kursus SPPT - BMAin KaloiÎncă nu există evaluări
- Zul Nazmi Zailani, Zulkarnain MD - Amin, Muhammad Ezzat Syahmie Mohammad Fauzi, Ahmad Adnan Abu BakarDocument5 paginiZul Nazmi Zailani, Zulkarnain MD - Amin, Muhammad Ezzat Syahmie Mohammad Fauzi, Ahmad Adnan Abu BakarAin KaloiÎncă nu există evaluări
- Performance Assessment of Solar Agricultural Water Pumping SystemDocument7 paginiPerformance Assessment of Solar Agricultural Water Pumping Systemayoube mecaÎncă nu există evaluări
- IEEEMY Newsletter Q3 2020Document13 paginiIEEEMY Newsletter Q3 2020Ain KaloiÎncă nu există evaluări
- Ieee Newsletter q3 Final 1Document42 paginiIeee Newsletter q3 Final 1Ain KaloiÎncă nu există evaluări
- SSRN Id4238828Document6 paginiSSRN Id4238828Ain KaloiÎncă nu există evaluări
- Design and Development of Solar Powered Agriculture Water Pump Irrigation SystemDocument11 paginiDesign and Development of Solar Powered Agriculture Water Pump Irrigation SystemAin KaloiÎncă nu există evaluări
- IECStandards IntroductionDocument42 paginiIECStandards IntroductionAin KaloiÎncă nu există evaluări
- Energies 15 07966 v2Document31 paginiEnergies 15 07966 v2Ain KaloiÎncă nu există evaluări
- Chapter 5 2nd OrderDocument33 paginiChapter 5 2nd OrderAin KaloiÎncă nu există evaluări
- 2nd Order Circuit Source Free Series RLC Part 2 OfflineDocument2 pagini2nd Order Circuit Source Free Series RLC Part 2 OfflineAin KaloiÎncă nu există evaluări
- Vector Fields: Part 1 Page 1Document13 paginiVector Fields: Part 1 Page 1Ain KaloiÎncă nu există evaluări
- Juri RovDocument1 paginăJuri RovAin KaloiÎncă nu există evaluări
- JuriDocument2 paginiJuriAin KaloiÎncă nu există evaluări
- 2nd Order Circuit Step Response For A Parallel RLC Part 2 OfflineDocument2 pagini2nd Order Circuit Step Response For A Parallel RLC Part 2 OfflineAin KaloiÎncă nu există evaluări
- 2nd Order Circuit Initial and Final Values Part 2 Offline PDFDocument2 pagini2nd Order Circuit Initial and Final Values Part 2 Offline PDFAin KaloiÎncă nu există evaluări
- 2nd Order Circuit Step Response For A Series RLC Part 2 OfflineDocument3 pagini2nd Order Circuit Step Response For A Series RLC Part 2 OfflineAin KaloiÎncă nu există evaluări
- 2nd Order Circuit Source Free Parallel RLC Part 2 OfflineDocument3 pagini2nd Order Circuit Source Free Parallel RLC Part 2 OfflineAin KaloiÎncă nu există evaluări
- Q3 AnswerDocument2 paginiQ3 AnswerAin KaloiÎncă nu există evaluări
- Jadual Tentatif PSM - IED.SDP & PSAD - 2019.20 - IIDocument1 paginăJadual Tentatif PSM - IED.SDP & PSAD - 2019.20 - IIAin KaloiÎncă nu există evaluări
- Fkee Psm1 B Seminar IDocument2 paginiFkee Psm1 B Seminar INurul HidayahÎncă nu există evaluări
- Backstepping Based Control of PV System Connected To The GridDocument6 paginiBackstepping Based Control of PV System Connected To The GridAin KaloiÎncă nu există evaluări
- CFP NusysDocument1 paginăCFP NusysAin KaloiÎncă nu există evaluări
- Brennan 2002Document8 paginiBrennan 2002Karla HernándezÎncă nu există evaluări
- Qss Manual Dpi 610e 165m0437Document232 paginiQss Manual Dpi 610e 165m0437Freddy Alexander Muñoz del CastilloÎncă nu există evaluări
- 160404c Positive Displacement PumpsDocument30 pagini160404c Positive Displacement PumpsMohamed MahdyÎncă nu există evaluări
- Chapter 31 Zinc Cementation 2016 Gold Ore ProcessingDocument8 paginiChapter 31 Zinc Cementation 2016 Gold Ore ProcessingMarioHReyesÎncă nu există evaluări
- 1gr-Fe Engine Control System7Document12 pagini1gr-Fe Engine Control System7mike chenÎncă nu există evaluări
- Ui sc134Document3 paginiUi sc134Budi AbdurozakÎncă nu există evaluări
- PSMR TechnicalDocument7 paginiPSMR Technicalrinashah1203Încă nu există evaluări
- LMI Series AA-B-C-E-J-P Metering Pumps Manual PDFDocument44 paginiLMI Series AA-B-C-E-J-P Metering Pumps Manual PDFRoberto MejiaÎncă nu există evaluări
- 417 Grbic Culin BielicDocument9 pagini417 Grbic Culin Bielicfajee_faridÎncă nu există evaluări
- Concrete Pumping Cop 2005Document27 paginiConcrete Pumping Cop 2005Vijay BhureÎncă nu există evaluări
- List of ProductsDocument6 paginiList of Productsahmed hamdyÎncă nu există evaluări
- Engine Opt c1 Feb 2015Document35 paginiEngine Opt c1 Feb 2015Arturo John Mark Mata50% (2)
- Hot Water Generator: Installation and Operation ManualDocument24 paginiHot Water Generator: Installation and Operation Manualmangal deo pathakÎncă nu există evaluări
- Oil Lubricated Deep Well Vertical Turbine PumpDocument3 paginiOil Lubricated Deep Well Vertical Turbine Pumpsync_arianÎncă nu există evaluări
- Installation and Operating InstructionsDocument284 paginiInstallation and Operating InstructionsNguyen Vinh NgocÎncă nu există evaluări
- PDF 1 10Document4 paginiPDF 1 10Ngọc TrâmÎncă nu există evaluări
- Hydrostatic Transmission1Document67 paginiHydrostatic Transmission1Anshul yadavÎncă nu există evaluări
- 02 - Condition Monitoring and MaintenanceDocument83 pagini02 - Condition Monitoring and MaintenanceMuhammad Amru Yazid100% (1)
- Preparation of Process Flow Diagrams, PipingDocument26 paginiPreparation of Process Flow Diagrams, PipingayenewÎncă nu există evaluări
- Rotary Press ANG VF - PrintDocument6 paginiRotary Press ANG VF - PrintagungbijaksanaÎncă nu există evaluări
- MDKDP DR Ds DT Du DV Parts ManualDocument68 paginiMDKDP DR Ds DT Du DV Parts ManualAndri MorenoÎncă nu există evaluări