S-ar putea să vă placă și
- Programmation CDocument6 paginiProgrammation CAymen HssainiÎncă nu există evaluări
- TP Initiation Au Fraisage CN PDFDocument9 paginiTP Initiation Au Fraisage CN PDFAymen HssainiÎncă nu există evaluări
- 03 - Les Differentes Formes de MaintenanceDocument7 pagini03 - Les Differentes Formes de MaintenanceWognin MoïseÎncă nu există evaluări
- Initiation Au FraisageDocument5 paginiInitiation Au FraisageAymen HssainiÎncă nu există evaluări
- 04 - Les Outils de Base de Prise de Decision PDFDocument5 pagini04 - Les Outils de Base de Prise de Decision PDFTriki Bilel100% (1)
- TP Initiation Au Fraisage CN PDFDocument9 paginiTP Initiation Au Fraisage CN PDFAymen HssainiÎncă nu există evaluări
- 04 - Tds - Analyse de ParetoDocument7 pagini04 - Tds - Analyse de ParetoSalah Eddine Chouikh100% (1)
- La RectificationDocument2 paginiLa RectificationAymen HssainiÎncă nu există evaluări
- Manuel de Programmation G-CodeDocument538 paginiManuel de Programmation G-CodeJorge Amaral100% (14)
- 02 Gestion Des Interventions PDFDocument9 pagini02 Gestion Des Interventions PDFAymen HssainiÎncă nu există evaluări
- Gammes Maintenance Preventive MAERADocument4 paginiGammes Maintenance Preventive MAERAAymen HssainiÎncă nu există evaluări
- Cours STRATEGIE DE MAINTENANCE PDFDocument67 paginiCours STRATEGIE DE MAINTENANCE PDFamekhzoumi80% (5)
- Guide PL7 Pro Connecter Et TransfererDocument1 paginăGuide PL7 Pro Connecter Et TransfererAymen HssainiÎncă nu există evaluări
- 120 - Couts de Maintenance - Prof - Retour Sur InvestissemenDocument8 pagini120 - Couts de Maintenance - Prof - Retour Sur InvestissemenAymen Hssaini100% (1)
- Guide Pl7 Pro Connecter Et TransfererDocument9 paginiGuide Pl7 Pro Connecter Et TransfererdoudoutstmÎncă nu există evaluări
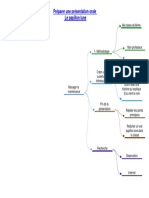
- Préparer Une Présentation Orale Le Papillon LuneDocument1 paginăPréparer Une Présentation Orale Le Papillon LuneAymen HssainiÎncă nu există evaluări
- Guide Pratique Usine Automobile Du FuturDocument61 paginiGuide Pratique Usine Automobile Du FuturAymen HssainiÎncă nu există evaluări
- Guide Pl7 Pro Connecter Et TransfererDocument9 paginiGuide Pl7 Pro Connecter Et TransfererdoudoutstmÎncă nu există evaluări
- JSFS 2000 141 3 3 0Document7 paginiJSFS 2000 141 3 3 0Aymen HssainiÎncă nu există evaluări
- FreDocument347 paginiFreAymen HssainiÎncă nu există evaluări
- Systeme Injection HdiDocument145 paginiSysteme Injection Hdicedricvillar100% (15)
- Equipement Du LaboratoireDocument170 paginiEquipement Du LaboratoireHeart King100% (1)
- 2016 - 05 - General Storage Recommendations For Spare Parts - FRDocument2 pagini2016 - 05 - General Storage Recommendations For Spare Parts - FRAymen HssainiÎncă nu există evaluări
- KONE GuideEntretienMaintenanceSécurité 2016Document30 paginiKONE GuideEntretienMaintenanceSécurité 2016Aymen HssainiÎncă nu există evaluări
- Cours PDFDocument150 paginiCours PDFAymen HssainiÎncă nu există evaluări
- 1hydrauliqParisTech PDFDocument34 pagini1hydrauliqParisTech PDFAymen HssainiÎncă nu există evaluări
- Chrono 01 PDFDocument32 paginiChrono 01 PDFAymen HssainiÎncă nu există evaluări
- Cours PDFDocument150 paginiCours PDFAymen HssainiÎncă nu există evaluări
- Module Gestion de La ProductionDocument78 paginiModule Gestion de La ProductionEl Jaouad67% (3)
- RLCrésumeducoursDocument14 paginiRLCrésumeducoursHamade MedÎncă nu există evaluări
- Corrigé Du Devoir de Synthèse N°1: Chimie Exercice 1Document4 paginiCorrigé Du Devoir de Synthèse N°1: Chimie Exercice 1Riadh MarouaniÎncă nu există evaluări
- 145 F 1305 PDFDocument32 pagini145 F 1305 PDFTeyar ibrahimÎncă nu există evaluări
- V/F Const. Matlab/SimulinkDocument17 paginiV/F Const. Matlab/SimulinkHamood YahyaÎncă nu există evaluări
- 04 Courant Continu Et Courants VariablesDocument10 pagini04 Courant Continu Et Courants Variableshicham boutouche100% (1)
- DUNOD - Le Cours de Physique de Feynman - Électromagnétisme 2 - R. FeynmanDocument433 paginiDUNOD - Le Cours de Physique de Feynman - Électromagnétisme 2 - R. FeynmanJB_caesar67% (3)
- TP MDFDocument11 paginiTP MDFRahma Boufarh50% (2)
- Charges RépartiesDocument2 paginiCharges RépartiesSou HirrÎncă nu există evaluări
- Série de TD1 (MM)Document2 paginiSérie de TD1 (MM)kima lachgarÎncă nu există evaluări
- Cours D'electricite de A-ZDocument23 paginiCours D'electricite de A-ZifrassenÎncă nu există evaluări
- Stage OuvrierDocument22 paginiStage OuvrierMhadheb Med AmineÎncă nu există evaluări
- Ex TransfoDocument9 paginiEx TransfoYounes Alami50% (2)
- Systeme TriphaseDocument15 paginiSysteme TriphaseSif eddineÎncă nu există evaluări
- Ma E84avhce 8400 Highline C 0.25-3.0kw v5-1 de en FR Es ItDocument17 paginiMa E84avhce 8400 Highline C 0.25-3.0kw v5-1 de en FR Es ItsackÎncă nu există evaluări
- TP Mecanique Sur Coussin DairDocument2 paginiTP Mecanique Sur Coussin DairCheujeu chaldouÎncă nu există evaluări
- Commande PWM Moteurs PDFDocument5 paginiCommande PWM Moteurs PDFerno785Încă nu există evaluări
- tp1 Alternateur TriphaséDocument8 paginitp1 Alternateur TriphasékaraliÎncă nu există evaluări
- These Harmonique PDFDocument156 paginiThese Harmonique PDFKhalil Montassar ZarroukÎncă nu există evaluări
- Evaluation Diagnostique Mouvement InteractionsDocument7 paginiEvaluation Diagnostique Mouvement InteractionsAppia LaulanÎncă nu există evaluări
- 1-Controle Technique BouenzaDocument5 pagini1-Controle Technique BouenzaAtipoÎncă nu există evaluări
- Relais ElectroniqueDocument21 paginiRelais Electroniquefatima zahraÎncă nu există evaluări
- PV SystDocument21 paginiPV SystRachida BÎncă nu există evaluări
- Dimensionnement Protection 56Document24 paginiDimensionnement Protection 56f2130Încă nu există evaluări
- Model 4 Terminale Bac Pro MecaniqueDocument14 paginiModel 4 Terminale Bac Pro Mecaniquedeco jakÎncă nu există evaluări
- Compte Rendu TP Vortex Forcé MDFDocument9 paginiCompte Rendu TP Vortex Forcé MDFTinhinane Mezair100% (2)
- Capteur IntelligentDocument20 paginiCapteur IntelligentAmina Ben100% (1)
- Cour de Fhysique - FGM 2 PDFDocument355 paginiCour de Fhysique - FGM 2 PDFEder GarciaÎncă nu există evaluări
- Travaux Diriges Ei l2 s1 2015Document29 paginiTravaux Diriges Ei l2 s1 2015YesmaRofia100% (2)
- Force de Coulomb Et Champ ÉlectriqueDocument3 paginiForce de Coulomb Et Champ ÉlectriqueAbdoulaye Boua BERTHEÎncă nu există evaluări
- MT 03649Document6 paginiMT 03649Zakari YaeÎncă nu există evaluări