S-ar putea să vă placă și
- Ejercicios 1 CA 410250 2020-2Document5 paginiEjercicios 1 CA 410250 2020-2Pablo Carrasco ContrerasÎncă nu există evaluări
- Examen Sustitutorio de Control II 2012-IDocument5 paginiExamen Sustitutorio de Control II 2012-IYefer Tony Sánchez CáceresÎncă nu există evaluări
- Ejercicios de Teoria de Control AutomatiDocument4 paginiEjercicios de Teoria de Control AutomatiNICOLAS CASTILLO ILLERAÎncă nu există evaluări
- 01 Ejercicios 2023-2Document4 pagini01 Ejercicios 2023-2Daniel Reinaldo Quezada MuñozÎncă nu există evaluări
- Prueba de ControlDocument2 paginiPrueba de ControlHenry Raul Faz SimancasÎncă nu există evaluări
- Final 2015-2Document1 paginăFinal 2015-2Termosoluciones sasÎncă nu există evaluări
- Hoja de Problemas #5MDocument10 paginiHoja de Problemas #5MMlclm RmirzÎncă nu există evaluări
- Taller 2 Fundamentos de ControlDocument3 paginiTaller 2 Fundamentos de ControlCarlos Eduardo Perez RestrepoÎncă nu există evaluări
- Optimized Title for Additional Exercises on Topic 1 (CompleteDocument28 paginiOptimized Title for Additional Exercises on Topic 1 (CompletePopocatl FloresÎncă nu există evaluări
- Control ParcialDocument7 paginiControl ParcialDavid SanchezÎncă nu există evaluări
- Evaluacion 2 Controladores IndustrialesDocument16 paginiEvaluacion 2 Controladores IndustrialesArco NegroÎncă nu există evaluări
- I2 Iee2613 2016 1Document4 paginiI2 Iee2613 2016 1DeatSoulÎncă nu există evaluări
- automatización y control fase I unidad IIDocument11 paginiautomatización y control fase I unidad IIJuan J. Rosales C.Încă nu există evaluări
- Controladores Industriales Ev. 2Document12 paginiControladores Industriales Ev. 2Cristian Alarcon100% (8)
- Deber de Ssitemas de Control PostgradoDocument4 paginiDeber de Ssitemas de Control PostgradoIvan PilataxiÎncă nu există evaluări
- Sim 1 Modelado y Analisis de Sistemas DinamicosDocument4 paginiSim 1 Modelado y Analisis de Sistemas DinamicosJuan Sebastian GiraldoÎncă nu există evaluări
- Modelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaDocument5 paginiModelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaAlberto Bardalez AricaÎncă nu există evaluări
- SPC3_EE647M _2022_1Document5 paginiSPC3_EE647M _2022_1Ailen StewartÎncă nu există evaluări
- RA Ord15 SolDocument7 paginiRA Ord15 SolCarlos Roman ZarzaÎncă nu există evaluări
- Capitulo 2 Control Analogico I - 2020 - VFDocument142 paginiCapitulo 2 Control Analogico I - 2020 - VFfraude.usicamm.cobaemÎncă nu există evaluări
- Guia Iea Examen ExensDocument32 paginiGuia Iea Examen ExensAlonso HernandezÎncă nu există evaluări
- Prac 10Document28 paginiPrac 10Carlos Guerrero Rodríguez100% (1)
- Cuaderno de Ejercicios de Introducción A La Teoría de Control PDFDocument37 paginiCuaderno de Ejercicios de Introducción A La Teoría de Control PDFMenelao ZubiriÎncă nu există evaluări
- Ilovepdf MergedDocument8 paginiIlovepdf MergedLÎncă nu există evaluări
- T2 - Ejercicios y SolucionesDocument16 paginiT2 - Ejercicios y SolucionesPablo Rodriguez Del BrioÎncă nu există evaluări
- Trabajo Parcial Nº2Document45 paginiTrabajo Parcial Nº2Nacho CagideÎncă nu există evaluări
- Examen RA C Ord 20 21Document3 paginiExamen RA C Ord 20 21antonio1575Încă nu există evaluări
- Informe Final N3 - JoseSamar - FelipeSanchezDocument10 paginiInforme Final N3 - JoseSamar - FelipeSanchezFelipe SanchezÎncă nu există evaluări
- Algunos Ejercicios de EssDocument11 paginiAlgunos Ejercicios de Essadin bellatorÎncă nu există evaluări
- PR2 Elt3752 Sem12023Document3 paginiPR2 Elt3752 Sem12023Jhonny BarcoÎncă nu există evaluări
- Informe Sistemas Dinámicos Control Segundo - DiegoDocument11 paginiInforme Sistemas Dinámicos Control Segundo - DiegoAlejandro RiveraÎncă nu există evaluări
- Clase Lu 3 Ma 4 AbrilDocument6 paginiClase Lu 3 Ma 4 AbrilDaniel José Del Valle CastilloÎncă nu există evaluări
- EstadoDocument10 paginiEstadoKatiuska CachisÎncă nu există evaluări
- MT227 EP 2015 1 SolDocument5 paginiMT227 EP 2015 1 SolFritzDeepÎncă nu există evaluări
- Informe Sistemas Dinámicos Control Tercero - DiegoDocument12 paginiInforme Sistemas Dinámicos Control Tercero - DiegoAlejandro RiveraÎncă nu există evaluări
- Tarea2 Prope Control 2013Document2 paginiTarea2 Prope Control 2013Rosa RomeroÎncă nu există evaluări
- Examen Parcial Sistemas de Control IIDocument2 paginiExamen Parcial Sistemas de Control IIROSAS MONTALVO JESUSÎncă nu există evaluări
- Primer Parcial de Control 1 2021-03Document2 paginiPrimer Parcial de Control 1 2021-03Jhon Taylor Usma HurtadoÎncă nu există evaluări
- ApprobDocument6 paginiApprobKhevin Lizano BorreroÎncă nu există evaluări
- Control Examen 1 2018 IIDocument8 paginiControl Examen 1 2018 IISantiago Fabian Valarezo TorresÎncă nu există evaluări
- 4 Control Respuesta TransitoriaDocument26 pagini4 Control Respuesta TransitoriaLuis J Zuluaga BetancurÎncă nu există evaluări
- 1.-Sistemas de Primer Orden Circuito RCDocument10 pagini1.-Sistemas de Primer Orden Circuito RCluisÎncă nu există evaluări
- Sem2008-1 ELT2642 PDFDocument53 paginiSem2008-1 ELT2642 PDFNataniel FloresÎncă nu există evaluări
- Problemas Sistemas de ControlDocument9 paginiProblemas Sistemas de ControlGabriel AstudilloÎncă nu există evaluări
- Control de velocidad de rodillos en fábrica de aluminioDocument8 paginiControl de velocidad de rodillos en fábrica de aluminioCarlos UsuaÎncă nu există evaluări
- 2020 P.I.D.Document7 pagini2020 P.I.D.Oscar CristianÎncă nu există evaluări
- Taller Uno Control AnálogoDocument12 paginiTaller Uno Control AnálogoDavid RodriguezÎncă nu există evaluări
- Sistema mecánico vibratorioDocument103 paginiSistema mecánico vibratoriocarlos patrickÎncă nu există evaluări
- Curso de Control Practico 6Document5 paginiCurso de Control Practico 6chalpasÎncă nu există evaluări
- Práctica1 U3 Respuesta Escalón e ImpulsoDocument16 paginiPráctica1 U3 Respuesta Escalón e ImpulsoEdgar Aaron NavarreteÎncă nu există evaluări
- Eje LGRDocument3 paginiEje LGRluis6antonio_2Încă nu există evaluări
- Ajuste de Reguladores de Turbinas Hidraulicas Con Tecnicas de Estimacion de ParametrosDocument8 paginiAjuste de Reguladores de Turbinas Hidraulicas Con Tecnicas de Estimacion de ParametrosJhonatan Barazarte PaezÎncă nu există evaluări
- TAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Document15 paginiTAREA N 2. Analisis de Sistemas de Control en Dominio Del Tiempo 2Reiner Campos RequelmeÎncă nu există evaluări
- Cuestionario 1 A1 ResueltoDocument3 paginiCuestionario 1 A1 ResueltoanaÎncă nu există evaluări
- Informe Control Cinta Transportadora1Document7 paginiInforme Control Cinta Transportadora1Santiago MoralesÎncă nu există evaluări
- Examen Final Control 1 2021-03Document1 paginăExamen Final Control 1 2021-03oscar lozanoÎncă nu există evaluări
- Problemas resueltos de Hidráulica de CanalesDe la EverandProblemas resueltos de Hidráulica de CanalesEvaluare: 4.5 din 5 stele4.5/5 (7)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe la EverandEjercicios de Integrales de Línea, Superficie y VolumenEvaluare: 4 din 5 stele4/5 (2)
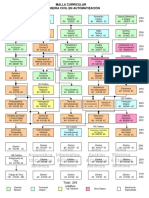
- Malla Ica B-N Con Total de Horas y CreditosDocument1 paginăMalla Ica B-N Con Total de Horas y CreditosOscar Ivan Vizcarra SepulvedaÎncă nu există evaluări
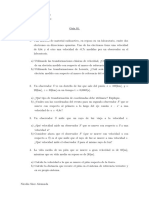
- 1-Relatividad Del MovimientoDocument2 pagini1-Relatividad Del MovimientoJ Pablo SàezÎncă nu există evaluări
- 1-Relatividad Del MovimientoDocument2 pagini1-Relatividad Del MovimientoJ Pablo SàezÎncă nu există evaluări
- TrifasicaDocument7 paginiTrifasicaJ Pablo SàezÎncă nu există evaluări
- REsonancia DibujosDocument8 paginiREsonancia DibujosJ Pablo SàezÎncă nu există evaluări
- MUI40 - BDA - PER1823 - Tema 02 - Análisis de DatosDocument43 paginiMUI40 - BDA - PER1823 - Tema 02 - Análisis de DatosKléber Cruz SánchezÎncă nu există evaluări
- TRABAJO ESMERILADO 181761 - Et Al. Grupo 3Document10 paginiTRABAJO ESMERILADO 181761 - Et Al. Grupo 3DANIEL FELIPE OVALLE PICONÎncă nu există evaluări
- Riesgosen Gasoductos IAPGDocument26 paginiRiesgosen Gasoductos IAPGHJ SJÎncă nu există evaluări
- Trazos y Valoración: Dibujo 1 2023-0Document5 paginiTrazos y Valoración: Dibujo 1 2023-0Franco UgarteÎncă nu există evaluări
- Determinacion de Acido AscorbicoDocument5 paginiDeterminacion de Acido AscorbicoOskiitar AcoostaÎncă nu există evaluări
- La Toma de Decisiones de Criterios MúltiplesDocument30 paginiLa Toma de Decisiones de Criterios MúltiplesIvan Julcapari RojasÎncă nu există evaluări
- Rotochamber MGMDocument8 paginiRotochamber MGMMarcos Aldana Villalda100% (1)
- Anexon2nnnCapacitornenInductornPOTENCIAS MIGUEL FLOREZDocument18 paginiAnexon2nnnCapacitornenInductornPOTENCIAS MIGUEL FLOREZMiguel FlogarÎncă nu există evaluări
- Proyecto Gas ANACODocument18 paginiProyecto Gas ANACOFranco Justoniano SilvaÎncă nu există evaluări
- Temario Curso Adobe IllustratorDocument3 paginiTemario Curso Adobe IllustratornagaÎncă nu există evaluări
- Planificación Diagnostico-1Document18 paginiPlanificación Diagnostico-1Karolina Tapia scalerandiÎncă nu există evaluări
- Ley de GaussDocument8 paginiLey de Gaussmiguel h pintosÎncă nu există evaluări
- Diseño de pavimentos rígidosDocument16 paginiDiseño de pavimentos rígidosAlexander Ponce VelardeÎncă nu există evaluări
- 2021 1 Edu1401 3 PDFDocument9 pagini2021 1 Edu1401 3 PDFDiego DíazÎncă nu există evaluări
- Mínimos cuadrados ponderados en regresión linealDocument9 paginiMínimos cuadrados ponderados en regresión linealALISON ELIZABETH HUAPAYA CAYCHOÎncă nu există evaluări
- Apuntes de Microeconomía: Elección del consumidorDocument26 paginiApuntes de Microeconomía: Elección del consumidorNicolás MelgarejoÎncă nu există evaluări
- Preparados Magistrales, 03 de Agosto de 2020 PDFDocument36 paginiPreparados Magistrales, 03 de Agosto de 2020 PDFAndres DurangoÎncă nu există evaluări
- Paso 5 - Sistemas Agroforestales - 1Document17 paginiPaso 5 - Sistemas Agroforestales - 1lipicepeÎncă nu există evaluări
- INV E-506-07 Elaboración de Canastas de Alambre para Gaviones y Colchogaviones.Document7 paginiINV E-506-07 Elaboración de Canastas de Alambre para Gaviones y Colchogaviones.Blosky Valcárcel VargasÎncă nu există evaluări
- ZenonDocument4 paginiZenonDaniel Ca CeÎncă nu există evaluări
- Adriana Ramírez - Trabajos ElectrodinámicaDocument20 paginiAdriana Ramírez - Trabajos ElectrodinámicaLC JayÎncă nu există evaluări
- SOUTHWEST WINDPOWER SKYSTREAM 3.7 Ficha ESDocument2 paginiSOUTHWEST WINDPOWER SKYSTREAM 3.7 Ficha ESDayana Tinta AlanyaÎncă nu există evaluări
- Memoria de Cálculo Sib GralDocument15 paginiMemoria de Cálculo Sib GralWalter Nieves Sandi0% (1)
- Parcial - Escenario 4: SEGUNDO BLOQUE-TEORICO - PRACTICO:SISTEMAS OPERACIONALES - (GRUPO B01)Document14 paginiParcial - Escenario 4: SEGUNDO BLOQUE-TEORICO - PRACTICO:SISTEMAS OPERACIONALES - (GRUPO B01)JOSE SAMUEL VARGAS DAZAÎncă nu există evaluări
- Determinación de la actividad enzimática de la catalasa y su constante de Michaelis-Menten KMDocument16 paginiDeterminación de la actividad enzimática de la catalasa y su constante de Michaelis-Menten KMLuis David GonzalezÎncă nu există evaluări
- Gas Refrigerante - Freon 22 (R-22) - ChemoursDocument14 paginiGas Refrigerante - Freon 22 (R-22) - ChemoursMiguel JuniorÎncă nu există evaluări
- ALTERNADORDocument79 paginiALTERNADORmichael lobosÎncă nu există evaluări
- 5° JEG 2020 MatemáticaDocument27 pagini5° JEG 2020 MatemáticabenjaminÎncă nu există evaluări
- 34.1 JIMÉNEZ Guerrero, Magdalena Diana - Razonamiento Complejo PDFDocument222 pagini34.1 JIMÉNEZ Guerrero, Magdalena Diana - Razonamiento Complejo PDFLetty Guzmán100% (11)