S-ar putea să vă placă și
- Estadística II - Ficha34!20!2Document1 paginăEstadística II - Ficha34!20!2Jose Migue Osorio TelloÎncă nu există evaluări
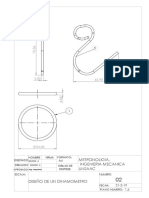
- Gancho de Un DinanometroDocument1 paginăGancho de Un DinanometroJose Migue Osorio TelloÎncă nu există evaluări
- Ejercicio de Tornillo de PotenciaDocument8 paginiEjercicio de Tornillo de PotenciaJose Migue Osorio TelloÎncă nu există evaluări
- TrabajoDocument40 paginiTrabajoJose Migue Osorio TelloÎncă nu există evaluări
- TapaDocument1 paginăTapaJose Migue Osorio TelloÎncă nu există evaluări
- Laterales Plano 2Document1 paginăLaterales Plano 2Jose Migue Osorio TelloÎncă nu există evaluări
- Construcción de Un DinamómetroDocument4 paginiConstrucción de Un DinamómetroJose Migue Osorio TelloÎncă nu există evaluări
- Elementos Mecanicos FlexiblesDocument50 paginiElementos Mecanicos FlexiblesadolfoclesÎncă nu există evaluări
- Nuevos en ResortesDocument9 paginiNuevos en ResortesJose Migue Osorio TelloÎncă nu există evaluări
- Expo Diseño Pregunta A y BDocument6 paginiExpo Diseño Pregunta A y BJose Migue Osorio TelloÎncă nu există evaluări
- Engranajes Helicodales y ConicosDocument45 paginiEngranajes Helicodales y ConicosMelvin FerÎncă nu există evaluări
- Nuevos Materiales de ResortesDocument4 paginiNuevos Materiales de ResortesJose Migue Osorio TelloÎncă nu există evaluări
- Engranajes Helicodales y ConicosDocument45 paginiEngranajes Helicodales y ConicosMelvin FerÎncă nu există evaluări
- Financiamiento Proyecto de LitioDocument3 paginiFinanciamiento Proyecto de LitioJose Migue Osorio TelloÎncă nu există evaluări
- I. La TemperaturaDocument27 paginiI. La TemperaturalenyÎncă nu există evaluări
- TolereanciasDocument6 paginiTolereanciasJose Migue Osorio TelloÎncă nu există evaluări
- Impacto Del Proyecto AmbientalDocument83 paginiImpacto Del Proyecto AmbientalJose Migue Osorio Tello100% (1)
- Ondas MecánicasDocument4 paginiOndas MecánicasJose Migue Osorio TelloÎncă nu există evaluări
- 309885758.dureza de Los MaterialesDocument9 pagini309885758.dureza de Los MaterialesWillinton Pacori CaceresÎncă nu există evaluări
- Antecedentes Proyecto de LitioDocument21 paginiAntecedentes Proyecto de LitioJose Migue Osorio Tello100% (3)
- Medidor de CaudalDocument25 paginiMedidor de CaudalJose Migue Osorio TelloÎncă nu există evaluări
- Term o MetrosDocument13 paginiTerm o MetroslenyÎncă nu există evaluări
- El SonometroDocument17 paginiEl SonometroJose Migue Osorio TelloÎncă nu există evaluări
- Interfer o MetroDocument37 paginiInterfer o MetroedutintaÎncă nu există evaluări
- Ergonómia, Diseños Mecánico, Seguridad en El TrabajoDocument15 paginiErgonómia, Diseños Mecánico, Seguridad en El TrabajoJose Migue Osorio TelloÎncă nu există evaluări
- Informe Practicas ProfesionalesDocument29 paginiInforme Practicas ProfesionalesJose Migue Osorio TelloÎncă nu există evaluări
- Bloques PatronDocument28 paginiBloques PatronJose Migue Osorio TelloÎncă nu există evaluări
- Ensayos MecanicosDocument15 paginiEnsayos MecanicoslenyÎncă nu există evaluări
- Sistema de Automatización Neumática en La Avicultura ProyectoDocument14 paginiSistema de Automatización Neumática en La Avicultura ProyectoJose Migue Osorio TelloÎncă nu există evaluări
- Sistema de TransmisionDocument23 paginiSistema de TransmisionAriel Taboada ZapataÎncă nu există evaluări
- Tema 2Document7 paginiTema 2manikiatricoÎncă nu există evaluări
- Guias Fisica Mecanica Clasica. 11°Document18 paginiGuias Fisica Mecanica Clasica. 11°Brian David Châvez AriasÎncă nu există evaluări
- Taller N°3. CinemáticaDocument2 paginiTaller N°3. CinemáticaLuis OrtizÎncă nu există evaluări
- Clasificación de MecanismosDocument3 paginiClasificación de MecanismosNoé VázquezÎncă nu există evaluări
- Programa Analitico-Trabaj. Practicos y Bibliog. Mecanica y Mecanismos - 2014Document9 paginiPrograma Analitico-Trabaj. Practicos y Bibliog. Mecanica y Mecanismos - 2014Matias EchevarriaÎncă nu există evaluări
- Escalamiento, El Arte de La Ingeniería QuímicaDocument10 paginiEscalamiento, El Arte de La Ingeniería QuímicaAnonymous vVsidh3nÎncă nu există evaluări
- PL # 1 Estudio Caída LibreDocument7 paginiPL # 1 Estudio Caída LibreGoar DíazÎncă nu există evaluări
- Clase6 29marzo 2019 CinematicaDocument15 paginiClase6 29marzo 2019 CinematicaLeonardo BorregoÎncă nu există evaluări
- ProblemasDocument6 paginiProblemasAnonimus290599Încă nu există evaluări
- Laboratorio#7: Cinematica Y DinamicaDocument10 paginiLaboratorio#7: Cinematica Y DinamicaRoger GutiérrezÎncă nu există evaluări
- Octavo Grado Cuadernillo 1 S1 S5Document56 paginiOctavo Grado Cuadernillo 1 S1 S5Walter CastroÎncă nu există evaluări
- Transmisión de Fuerza Por Engranajes 1Document11 paginiTransmisión de Fuerza Por Engranajes 1Luis Alberto TorresÎncă nu există evaluări
- Ej Mecanismos PDFDocument10 paginiEj Mecanismos PDFenriqueÎncă nu există evaluări
- Investigación Revista de NilbiaDocument68 paginiInvestigación Revista de NilbiaGreixiÎncă nu există evaluări
- Palancas de Primer Segundo y Tercer GradoDocument2 paginiPalancas de Primer Segundo y Tercer GradoCarlos Alexander L. Hernandez0% (1)
- El DiferencialDocument7 paginiEl Diferencialerik gomezÎncă nu există evaluări
- Informe de Laboratorio 3 Física 1100Document5 paginiInforme de Laboratorio 3 Física 1100Gilmer BarcayaÎncă nu există evaluări
- Tercer Parcial DINAMICADocument14 paginiTercer Parcial DINAMICAjc4d2gÎncă nu există evaluări
- GUIA Nro1 Cinematica 2016 PDFDocument13 paginiGUIA Nro1 Cinematica 2016 PDFEdison Rivera FigueroaÎncă nu există evaluări
- 4.1EJERCICIOS PROPUESTOS CinematicaDocument2 pagini4.1EJERCICIOS PROPUESTOS CinematicaDarlin Rojas FasanandoÎncă nu există evaluări
- Tarea Física 24 09Document7 paginiTarea Física 24 09oscar sebastian vela reateguiÎncă nu există evaluări
- Problemas de MruDocument7 paginiProblemas de MruIsai Rocha RodriguezÎncă nu există evaluări
- CINEMATICADocument8 paginiCINEMATICAderes0% (1)
- FÍSICA MÉDICA 1 ResumenDocument72 paginiFÍSICA MÉDICA 1 ResumenAlicia NistalÎncă nu există evaluări
- Proyecto Transmision Renault FinalDocument34 paginiProyecto Transmision Renault FinalFabián GutiérrezÎncă nu există evaluări
- Guía de Práctica DiferencialDocument10 paginiGuía de Práctica DiferencialEduardo CYÎncă nu există evaluări
- Movimiento Circular UniformeDocument4 paginiMovimiento Circular UniformeViicky SamÎncă nu există evaluări
- Informe 5 de FisicaDocument7 paginiInforme 5 de FisicaJonathan MenesesÎncă nu există evaluări