S-ar putea să vă placă și
- Analysis of Modified Isochronal Tests To Predict The Stabilized Deliverability Potential of Gas Wells Without Using Stabilized Flow DataDocument19 paginiAnalysis of Modified Isochronal Tests To Predict The Stabilized Deliverability Potential of Gas Wells Without Using Stabilized Flow DataAndreco 210198Încă nu există evaluări
- Pipe Network AnalysisDocument32 paginiPipe Network AnalysisRANJINI02VÎncă nu există evaluări
- Pge 362 Exam1Document6 paginiPge 362 Exam1Saa D ShamimÎncă nu există evaluări
- ANSI-SMACNA 2006 HvacDuctStandardsDocument64 paginiANSI-SMACNA 2006 HvacDuctStandardsErica MorrisonÎncă nu există evaluări
- Fundamentals of Thermodynamics (6th Edition) SONNTAG, BORGNAKKE VAN WYLENDocument814 paginiFundamentals of Thermodynamics (6th Edition) SONNTAG, BORGNAKKE VAN WYLENDarwinQuin63% (8)
- Extracted Geotechnical Sample ProblemDocument12 paginiExtracted Geotechnical Sample ProblemFrancesca DaisyJaneÎncă nu există evaluări
- CAPE Physics Unit 2 Paper 2 2008Document18 paginiCAPE Physics Unit 2 Paper 2 2008migo1010% (1)
- Astm F1877 PDFDocument14 paginiAstm F1877 PDFMohdhafizFaiz MdAliÎncă nu există evaluări
- The TurbochargerDocument19 paginiThe TurbochargerAbdallah MansourÎncă nu există evaluări
- Analysis of Dynamic Characteristics of Selected Pneumatic SystemsDocument9 paginiAnalysis of Dynamic Characteristics of Selected Pneumatic SystemshamzaÎncă nu există evaluări
- Flow Pressure Analysis of Pipe Networks With Linear Theory MethodDocument5 paginiFlow Pressure Analysis of Pipe Networks With Linear Theory MethodmihretuÎncă nu există evaluări
- Transient Analysis of Isothermal Gas Flow in Pipeline NetworkDocument9 paginiTransient Analysis of Isothermal Gas Flow in Pipeline NetworkBakhytzhan AssilbekovÎncă nu există evaluări
- The Numerical Modelling of Flows in Complex Pipe NetworksDocument6 paginiThe Numerical Modelling of Flows in Complex Pipe NetworksEmmanuelEkhaizorÎncă nu există evaluări
- Design of Natural Circulation BoilerDocument12 paginiDesign of Natural Circulation BoilerALIyilmazÎncă nu există evaluări
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 paginiModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseÎncă nu există evaluări
- Flow Reactor Models For Fluid-Fluid Systems, Based On The Two-Film TheoryDocument6 paginiFlow Reactor Models For Fluid-Fluid Systems, Based On The Two-Film TheoryFadwah MokhtarÎncă nu există evaluări
- 1 s2.0 S0307904X08000607 Main PDFDocument17 pagini1 s2.0 S0307904X08000607 Main PDFalorenzo66Încă nu există evaluări
- Mathematical Modeling of Two Tank System Ijariie4840Document8 paginiMathematical Modeling of Two Tank System Ijariie4840Abeng YogtaÎncă nu există evaluări
- Numerical Simulation of Gasification Process On Rib-Tube of Open Rack VaporizerDocument7 paginiNumerical Simulation of Gasification Process On Rib-Tube of Open Rack VaporizerabdoÎncă nu există evaluări
- Optimal Numerical Method For Simulating Dynamic Flow of Gas in PipelinesDocument11 paginiOptimal Numerical Method For Simulating Dynamic Flow of Gas in PipelinesBakhytzhan AssilbekovÎncă nu există evaluări
- Theory Important 2Document9 paginiTheory Important 2Anik MondalÎncă nu există evaluări
- T.R.Fietz. STEADY FLOW IN SMALL PIPE NETWORKS USING LINEAR THEORY.1973Document29 paginiT.R.Fietz. STEADY FLOW IN SMALL PIPE NETWORKS USING LINEAR THEORY.1973Вася ПупкинÎncă nu există evaluări
- Verification of Transient Gas Flow Simulation Model: PSIG 1010Document10 paginiVerification of Transient Gas Flow Simulation Model: PSIG 1010Yogesh JagdaleÎncă nu există evaluări
- Articulo 8-5 PDFDocument10 paginiArticulo 8-5 PDFMiguel OrtegaÎncă nu există evaluări
- Fast Decoupled Load Flow: Hypothesis, Derivations, and TestingDocument7 paginiFast Decoupled Load Flow: Hypothesis, Derivations, and TestingjasonkinÎncă nu există evaluări
- Gas Line Pulse AnalysisDocument6 paginiGas Line Pulse AnalysisSerguÎncă nu există evaluări
- CFD Simulation of The Turbulent Flow of Pulp Fibre SuspensionsDocument11 paginiCFD Simulation of The Turbulent Flow of Pulp Fibre SuspensionsAntonio HazmanÎncă nu există evaluări
- Generalized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseDocument9 paginiGeneralized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseLazaro S. EscalanteÎncă nu există evaluări
- EasyChair Preprint 1660Document9 paginiEasyChair Preprint 1660HendraMasvikaÎncă nu există evaluări
- SCS & CFD PDFDocument10 paginiSCS & CFD PDFAvinash ParmarÎncă nu există evaluări
- UntitledDocument14 paginiUntitledMed MaxÎncă nu există evaluări
- Advanced Transformer Control Modeling in An Optimal Power Flow Using Newton's MethodDocument9 paginiAdvanced Transformer Control Modeling in An Optimal Power Flow Using Newton's MethodHoracio Manuel Ayala DazaÎncă nu există evaluări
- ISA Transactions: Farshad Merrikh-Bayat, Masoud Karimi-GhartemaniDocument6 paginiISA Transactions: Farshad Merrikh-Bayat, Masoud Karimi-Ghartemaniapi-19660864Încă nu există evaluări
- Simulation of Transients in Unerground Cables With Frequency Dependent ModalDocument12 paginiSimulation of Transients in Unerground Cables With Frequency Dependent ModalMadhusudhan Srinivasan100% (1)
- MITRES 6 007S11 Lec17Document14 paginiMITRES 6 007S11 Lec17Henry Lois Davila AndradeÎncă nu există evaluări
- Markov Channel WirelessDocument28 paginiMarkov Channel WirelessJoão RamosÎncă nu există evaluări
- Difference Between Variable & Fixed Speed Machined in Hydro Power ProjectsDocument14 paginiDifference Between Variable & Fixed Speed Machined in Hydro Power ProjectsHema KumarÎncă nu există evaluări
- Moment Models of General Transmission Lines With Application To Interconnect Analysis and OptimizationDocument37 paginiMoment Models of General Transmission Lines With Application To Interconnect Analysis and Optimizationavishek2byÎncă nu există evaluări
- Modeling of A DC Plasma Torch in Laminar and Turbulent FlowDocument24 paginiModeling of A DC Plasma Torch in Laminar and Turbulent FlowVerayoot1357Încă nu există evaluări
- Commun Nonlinear Sci Numer SimulatDocument9 paginiCommun Nonlinear Sci Numer SimulatAhmed S. El DenÎncă nu există evaluări
- System-Level Analysis of Chilled Water Systems Aboard Naval ShipsDocument6 paginiSystem-Level Analysis of Chilled Water Systems Aboard Naval ShipsAlin NanuÎncă nu există evaluări
- Behavior of Current Transformers (CTS) Under Severe Saturation ConditionDocument5 paginiBehavior of Current Transformers (CTS) Under Severe Saturation ConditionAdianto Ari PurwanaÎncă nu există evaluări
- Two Way Finite Automata With Quantum and Classi - 2002 - Theoretical Computer SCDocument13 paginiTwo Way Finite Automata With Quantum and Classi - 2002 - Theoretical Computer SCwassimÎncă nu există evaluări
- The Flow of Power-Law Fluids in Axisymmetric Corrugated TubesDocument16 paginiThe Flow of Power-Law Fluids in Axisymmetric Corrugated Tubesabcdefg43212004Încă nu există evaluări
- Inversor de Fuente de Corriente Trifásico de Una Etapa para Sistema Fotovoltaico Conectado A La RedDocument9 paginiInversor de Fuente de Corriente Trifásico de Una Etapa para Sistema Fotovoltaico Conectado A La RedeliasÎncă nu există evaluări
- IAHR WG1 2006 Nicolet FinalDocument16 paginiIAHR WG1 2006 Nicolet FinalFolpoÎncă nu există evaluări
- Shanthi PavanDocument12 paginiShanthi PavanAasif HameedÎncă nu există evaluări
- A Computer Model For Three-Dimensional Flow in FurnacesDocument10 paginiA Computer Model For Three-Dimensional Flow in FurnacesGunvir SinghÎncă nu există evaluări
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDocument15 paginiBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Încă nu există evaluări
- The Influence of The Lorenz System Fractionality oDocument5 paginiThe Influence of The Lorenz System Fractionality oJulexy AntonellaÎncă nu există evaluări
- Non-Newtonian Tangential Flow in Cylindrical Annuli: TadmorDocument10 paginiNon-Newtonian Tangential Flow in Cylindrical Annuli: TadmorAlejandro Serrano ChavezÎncă nu există evaluări
- Calculating SpectraDocument16 paginiCalculating Spectraziggie_lenzÎncă nu există evaluări
- A Numerical Method For Identifying The Location of A Fluid Leak in A PipelineDocument6 paginiA Numerical Method For Identifying The Location of A Fluid Leak in A PipelinerealÎncă nu există evaluări
- Fast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGADocument13 paginiFast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGAnhatvpÎncă nu există evaluări
- Part B - System of Equations For Pipe NetworkDocument137 paginiPart B - System of Equations For Pipe Networksamadony100% (2)
- Model of The Coupled Transmission Lines With A Non-Uniform DielectricDocument6 paginiModel of The Coupled Transmission Lines With A Non-Uniform DielectricGrant HeilemanÎncă nu există evaluări
- Phase Domain Modelling of Frequency Dependent Transmission Lines by Means of An Arma ModelDocument11 paginiPhase Domain Modelling of Frequency Dependent Transmission Lines by Means of An Arma ModelMadhusudhan SrinivasanÎncă nu există evaluări
- Letter: Resolving The Energy Levels of A Nanomechanical OscillatorDocument11 paginiLetter: Resolving The Energy Levels of A Nanomechanical OscillatorFausto CésarÎncă nu există evaluări
- Tutorial On Computer-Aided Analysis Switched-Capacitor CircuitsDocument19 paginiTutorial On Computer-Aided Analysis Switched-Capacitor CircuitsnidhalÎncă nu există evaluări
- Technology: Schweppe CambridgeDocument6 paginiTechnology: Schweppe CambridgeAnonymous eOLCLhÎncă nu există evaluări
- Mercado 2001 Modeling Flow and Heat Transfer in Tubes Using A Fast CFD FormulationDocument10 paginiMercado 2001 Modeling Flow and Heat Transfer in Tubes Using A Fast CFD FormulationeliastorcaÎncă nu există evaluări
- MOCDocument7 paginiMOCAKHILESH PASWANÎncă nu există evaluări
- New Model For Transformer Saturation Characteristics by Including HysteresisDocument7 paginiNew Model For Transformer Saturation Characteristics by Including HysteresisNohelia CruzÎncă nu există evaluări
- Effects of Air Entrainment On Fluid Transients in Pumping SystemsDocument7 paginiEffects of Air Entrainment On Fluid Transients in Pumping SystemsIjaz FazilÎncă nu există evaluări
- Modeling Szymczyk Transactions 130 2015Document10 paginiModeling Szymczyk Transactions 130 2015Jack CavaluzziÎncă nu există evaluări
- Reviews in Computational Chemistry, Volume 31De la EverandReviews in Computational Chemistry, Volume 31Abby L. ParrillÎncă nu există evaluări
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119De la EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Încă nu există evaluări
- Quiz Python Effective Programming Week 1Document2 paginiQuiz Python Effective Programming Week 1Saa D ShamimÎncă nu există evaluări
- RARBGDocument1 paginăRARBGSaa D ShamimÎncă nu există evaluări
- West Nile Delta Nooros Atoll: Flow Regimes Size of Each Compartment Material-Balance AnalysisDocument2 paginiWest Nile Delta Nooros Atoll: Flow Regimes Size of Each Compartment Material-Balance AnalysisSaa D ShamimÎncă nu există evaluări
- Quiz#2Document3 paginiQuiz#2Saa D Shamim100% (1)
- Eng. Mohsin Naeem: Career ObjectiveDocument2 paginiEng. Mohsin Naeem: Career ObjectiveSaa D ShamimÎncă nu există evaluări
- Quiz Python Effective Programming Week 2Document2 paginiQuiz Python Effective Programming Week 2Saa D ShamimÎncă nu există evaluări
- DFDGFHGDocument101 paginiDFDGFHGSaa D ShamimÎncă nu există evaluări
- CyberGhost - Login DataDocument1 paginăCyberGhost - Login DataSaa D ShamimÎncă nu există evaluări
- Median ModeDocument3 paginiMedian Modekhelanmm6085Încă nu există evaluări
- RRDocument1 paginăRRSaa D ShamimÎncă nu există evaluări
- MCAT Uhs Past Paper (2008-2016)Document180 paginiMCAT Uhs Past Paper (2008-2016)Rocky Dood Lolz83% (6)
- Acidizing Oil Natural Gas Briefing Paper v2Document5 paginiAcidizing Oil Natural Gas Briefing Paper v2Radu Teodor GoranÎncă nu există evaluări
- DehydrationDocument13 paginiDehydrationSaa D ShamimÎncă nu există evaluări
- Measurement of Flow of A Gas (Repaired)Document30 paginiMeasurement of Flow of A Gas (Repaired)Saa D ShamimÎncă nu există evaluări
- Wcms 110199Document344 paginiWcms 110199jkÎncă nu există evaluări
- Hosts UmbrellaDocument1 paginăHosts UmbrellaFabsor SoralÎncă nu există evaluări
- Mdcat PDFDocument47 paginiMdcat PDFsajidÎncă nu există evaluări
- Numerical Analysis - MTH603 Handouts Lecture 21Document5 paginiNumerical Analysis - MTH603 Handouts Lecture 21roshanpateliaÎncă nu există evaluări
- Project Management and PlanningDocument31 paginiProject Management and PlanningSaa D ShamimÎncă nu există evaluări
- Welltest Cptoauthor PDFDocument6 paginiWelltest Cptoauthor PDFsdc rizkiÎncă nu există evaluări
- Saturation Monitoring With The RST Reservoir Saturation ToolDocument11 paginiSaturation Monitoring With The RST Reservoir Saturation ToolMohamed SadekÎncă nu există evaluări
- Drill Stem TestingDocument16 paginiDrill Stem TestingpothirajkalyanÎncă nu există evaluări
- Gasifier W: SyngasDocument8 paginiGasifier W: SyngascristopuloÎncă nu există evaluări
- 2 Classification Additives CalculationsDocument32 pagini2 Classification Additives CalculationsSaa D ShamimÎncă nu există evaluări
- IODocument61 paginiIOSaa D ShamimÎncă nu există evaluări
- Gasifier W: SyngasDocument8 paginiGasifier W: SyngascristopuloÎncă nu există evaluări
- PGE 361 Lecture 8 Rock Permeability Average (Compatibility Mode)Document20 paginiPGE 361 Lecture 8 Rock Permeability Average (Compatibility Mode)adsadas100% (1)
- 2007 Characteristics of Bio-Oil-Syngas and Its Utilization in FT SynthesisDocument12 pagini2007 Characteristics of Bio-Oil-Syngas and Its Utilization in FT SynthesisSaa D ShamimÎncă nu există evaluări
- Analysis and Design of Suspension Cable BridgeDocument5 paginiAnalysis and Design of Suspension Cable BridgeNhel AlbrechtÎncă nu există evaluări
- PHY3QMO - Computational AssignmentDocument4 paginiPHY3QMO - Computational AssignmentReally SexyÎncă nu există evaluări
- Evaluation of LS-DYNA Concrete Material Model 159Document209 paginiEvaluation of LS-DYNA Concrete Material Model 159SudathipTangwongchaiÎncă nu există evaluări
- Comparacion Ansys CFX y TelemacDocument8 paginiComparacion Ansys CFX y TelemacOscar Choque JaqquehuaÎncă nu există evaluări
- Oceanic Anoxic Events (O.a.e) Organic Rocks Deposition CretaceousDocument6 paginiOceanic Anoxic Events (O.a.e) Organic Rocks Deposition CretaceousJulian De Bedout OrdoñezÎncă nu există evaluări
- Buffer SelectionDocument3 paginiBuffer SelectionSandeep KumarÎncă nu există evaluări
- 8.6C PosttestDocument2 pagini8.6C PosttestYohanes RatnodiyantoÎncă nu există evaluări
- RRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRDocument14 paginiRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRRPranay GoswamiÎncă nu există evaluări
- Promaspray® F5 PDFDocument4 paginiPromaspray® F5 PDFhero6600Încă nu există evaluări
- An Efficient Algorithm For The Calculation of A Constant Q TransformDocument4 paginiAn Efficient Algorithm For The Calculation of A Constant Q TransformKarlAschnikowÎncă nu există evaluări
- Quiz 6 EnergyDocument2 paginiQuiz 6 Energyeloizamay100% (1)
- Analog Vs Digital DataDocument3 paginiAnalog Vs Digital Datanmuhunthan100% (1)
- Denver, H., 1985 - Settlement Calculation For Footings On SandDocument8 paginiDenver, H., 1985 - Settlement Calculation For Footings On SandbusyspiderÎncă nu există evaluări
- Experiment No. 1Document12 paginiExperiment No. 1KennethÎncă nu există evaluări
- Prof. (Retd.) M. G. Gadgil Prof. (DR.) Yogendra Singh: 4.00PM To 6.30PMDocument2 paginiProf. (Retd.) M. G. Gadgil Prof. (DR.) Yogendra Singh: 4.00PM To 6.30PMMohammed Junaid ShaikhÎncă nu există evaluări
- Maxwell-Boltzmann DistributionDocument8 paginiMaxwell-Boltzmann DistributionlamyantingÎncă nu există evaluări
- O3 Final ReportDocument109 paginiO3 Final ReportFaizan MirÎncă nu există evaluări
- Chapter 4Document49 paginiChapter 4Jakir HossainÎncă nu există evaluări
- Thermodynamics MST 2011Document3 paginiThermodynamics MST 2011greenhoochyÎncă nu există evaluări
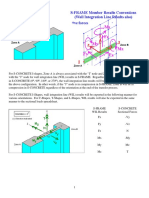
- Wall Integration Conventions S-CONCRETE R11 S-FRAMEDocument3 paginiWall Integration Conventions S-CONCRETE R11 S-FRAMESyed RaziuddinÎncă nu există evaluări
- Math 112Document3 paginiMath 112janinasuzetteÎncă nu există evaluări
- The Zeeman EffectDocument11 paginiThe Zeeman EffectAlex TarrÎncă nu există evaluări
- 1.1 General: Means So Much Affected As Those Whose Foundations Did Not Reach The Bottom of The Soil"Document54 pagini1.1 General: Means So Much Affected As Those Whose Foundations Did Not Reach The Bottom of The Soil"Sai GnanadeepÎncă nu există evaluări