S-ar putea să vă placă și
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsDe la EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsEvaluare: 5 din 5 stele5/5 (1)
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYDe la EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYÎncă nu există evaluări
- Unit 1 Vector AnalysisDocument24 paginiUnit 1 Vector AnalysisUtsav PathakÎncă nu există evaluări
- Phys 82: Review of VectorsDocument27 paginiPhys 82: Review of VectorsSagnale UnnoÎncă nu există evaluări
- Formulario S1-S3Document1 paginăFormulario S1-S371497642Încă nu există evaluări
- 2-EM-Vector (Part #1)Document18 pagini2-EM-Vector (Part #1)arif hakam hidayatÎncă nu există evaluări
- Electricidad y MagnetismoDocument4 paginiElectricidad y Magnetismojose2017Încă nu există evaluări
- Unit01 SetsDocument22 paginiUnit01 SetsThành NhanÎncă nu există evaluări
- One Sheet Math ReviewDocument6 paginiOne Sheet Math ReviewMurugesan PalrajÎncă nu există evaluări
- Indices: Quick Reference Sheets 1Document3 paginiIndices: Quick Reference Sheets 1SrinivasaÎncă nu există evaluări
- Wa0004Document109 paginiWa0004Sammy HushÎncă nu există evaluări
- Vector RevisionDocument7 paginiVector RevisionSumaya Akter Ruhi 2022610642Încă nu există evaluări
- Add Maths Crash Course 2022Document16 paginiAdd Maths Crash Course 2022Raveena SinghÎncă nu există evaluări
- Chapter3-Differential Equations of Mass TransferDocument16 paginiChapter3-Differential Equations of Mass TransferRadwan Ayman100% (1)
- Summary Solid 2021Document8 paginiSummary Solid 2021zyadhany268Încă nu există evaluări
- Semester 1 Maths FormulaDocument7 paginiSemester 1 Maths FormulaxsDXZxÎncă nu există evaluări
- 11th PHYSICSDocument9 pagini11th PHYSICSAfsarÎncă nu există evaluări
- L2 Vector AdditionDocument5 paginiL2 Vector AdditionAvneetK SainiÎncă nu există evaluări
- Electric Field: What Is Electromagnetics?Document24 paginiElectric Field: What Is Electromagnetics?Mary Joan MirandaÎncă nu există evaluări
- Thomas Calculus Early Transcendentals Fifteenth Edition Joel Hass All ChapterDocument67 paginiThomas Calculus Early Transcendentals Fifteenth Edition Joel Hass All Chapterramona.evans546100% (6)
- Math Formulas For Grade11Document5 paginiMath Formulas For Grade11Raashiq60% (5)
- (P6) - VectorsDocument61 pagini(P6) - VectorsAbhay GoyalÎncă nu există evaluări
- Mathematics N3 Trigonomentry Tutorial Notes PDFDocument15 paginiMathematics N3 Trigonomentry Tutorial Notes PDFKatlego MofommeÎncă nu există evaluări
- Phys 11-Problem Set 1Document1 paginăPhys 11-Problem Set 1angelicaelagunoyÎncă nu există evaluări
- MECH380 - Take Home Quiz - 1 - SolutionDocument7 paginiMECH380 - Take Home Quiz - 1 - SolutionvjscricÎncă nu există evaluări
- Vector Stokes TheoramDocument26 paginiVector Stokes TheoramjhffklÎncă nu există evaluări
- Vector AlgebraDocument4 paginiVector AlgebraMd Ahsan HalimiÎncă nu există evaluări
- Course: FLUID MECH 313 Fluid Statics: P Pressure, N/M F Force, N, Lb. A Area, MDocument16 paginiCourse: FLUID MECH 313 Fluid Statics: P Pressure, N/M F Force, N, Lb. A Area, MRenneil De PabloÎncă nu există evaluări
- CS 543: Computer Graphics Lecture 3 (Part II) : Points, Scalars and VectorsDocument23 paginiCS 543: Computer Graphics Lecture 3 (Part II) : Points, Scalars and VectorsChi HanaÎncă nu există evaluări
- Required Formulas: Number Line: Sign NumbersDocument2 paginiRequired Formulas: Number Line: Sign Numberszahed83Încă nu există evaluări
- Inverters: Eng. Ibrahim Mahmoud IbrahimDocument9 paginiInverters: Eng. Ibrahim Mahmoud IbrahimMahmoud A. AboulhasanÎncă nu există evaluări
- Vector Analysis ReviewerDocument8 paginiVector Analysis ReviewerBea Abesamis100% (1)
- 4 CL305 Eqs of Change IsothermalDocument42 pagini4 CL305 Eqs of Change Isothermalshivurkolli07Încă nu există evaluări
- Genphy1 Prelims ReviewerDocument9 paginiGenphy1 Prelims Reviewerempresscpy crackerÎncă nu există evaluări
- HW#1 (Model Answer)Document6 paginiHW#1 (Model Answer)ali112369Încă nu există evaluări
- Equation SheetsDocument2 paginiEquation Sheetsya OuÎncă nu există evaluări
- Class 11 Maths - Short Notes - Exam Winner - Allen SirDocument21 paginiClass 11 Maths - Short Notes - Exam Winner - Allen SirfarazainaraÎncă nu există evaluări
- Lecture Notes ON: Engineering PhysicsDocument133 paginiLecture Notes ON: Engineering PhysicsVishwa bandhu knÎncă nu există evaluări
- Vectors SummaryDocument3 paginiVectors Summarykeinan5Încă nu există evaluări
- Formula ListDocument28 paginiFormula ListAnubhav JunejaÎncă nu există evaluări
- Advanced Math 1 Principles and Sample ProblemsDocument5 paginiAdvanced Math 1 Principles and Sample ProblemsKrisha Jean MacalinoÎncă nu există evaluări
- Cheat Sheet - Vector Algebra: Scalar Multiplication: Dot ProductDocument1 paginăCheat Sheet - Vector Algebra: Scalar Multiplication: Dot ProductcoldplateÎncă nu există evaluări
- SAT Math Cheat Sheet STTV 2020Document8 paginiSAT Math Cheat Sheet STTV 2020Vuong HoangÎncă nu există evaluări
- Bagdasar2013 NEWDocument27 paginiBagdasar2013 NEWDennis YartelÎncă nu există evaluări
- ArithmeticDocument10 paginiArithmeticnanuleibÎncă nu există evaluări
- Difcal 1Document74 paginiDifcal 1Viene BagsitÎncă nu există evaluări
- Important-Rules Maths IgcseDocument39 paginiImportant-Rules Maths Igcsesanaaliii202Încă nu există evaluări
- Physics II: Electromagnetism (PH102) : Subhaditya Bhattacharya Iitg Email:, Office No: EVC 14, Phone: 3558Document23 paginiPhysics II: Electromagnetism (PH102) : Subhaditya Bhattacharya Iitg Email:, Office No: EVC 14, Phone: 3558Simran Radheshyam SoniÎncă nu există evaluări
- Vectors, Scalars, Dot Product, Cross ProductDocument4 paginiVectors, Scalars, Dot Product, Cross ProductJoshua LorenzoÎncă nu există evaluări
- ( + 2 Ab+b ( 2ab+b: A+b) A A B) ADocument5 pagini( + 2 Ab+b ( 2ab+b: A+b) A A B) AsiewthiangÎncă nu există evaluări
- Mobile Robotics Lecture No. 2Document61 paginiMobile Robotics Lecture No. 2ZaidKhanÎncă nu există evaluări
- UNIT VECRORS Sum Difference NormalizationDocument20 paginiUNIT VECRORS Sum Difference NormalizationReeve Joevanni OcayÎncă nu există evaluări
- 电动力学 课件:Course1 Vector AnalysisDocument29 pagini电动力学 课件:Course1 Vector AnalysisJUN LAIÎncă nu există evaluări
- Plane and Solid Mensuration Lesson 6Document11 paginiPlane and Solid Mensuration Lesson 6Mark Johnson Dela PeñaÎncă nu există evaluări
- Tipos de Magnitudes Físicas: Magnitud Escalar: Definida Mediante Un Número yDocument20 paginiTipos de Magnitudes Físicas: Magnitud Escalar: Definida Mediante Un Número yjaviÎncă nu există evaluări
- 0580 IGCSE Mathematics - Useful FormulaeDocument3 pagini0580 IGCSE Mathematics - Useful FormulaeSupermartin767Încă nu există evaluări
- Cbse 10 TH Maths Formulas Basic Algebraic IdentitiesDocument7 paginiCbse 10 TH Maths Formulas Basic Algebraic Identities10B-10.BHUMIKA KOCHARÎncă nu există evaluări
- AddMath Formula SheetDocument5 paginiAddMath Formula SheetHidayah TeacherÎncă nu există evaluări
- Solución Taller Carga Axial: - Santiago Mancera - Mecánica de Solidos 2Document21 paginiSolución Taller Carga Axial: - Santiago Mancera - Mecánica de Solidos 2Santiago ManceraÎncă nu există evaluări
- Physics 141 Equation Sheet-Knight 4 EdDocument1 paginăPhysics 141 Equation Sheet-Knight 4 EdSimon SituÎncă nu există evaluări
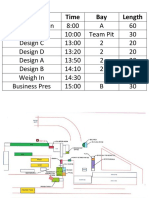
- Event Time Bay LengthDocument2 paginiEvent Time Bay LengthYeÎncă nu există evaluări
- Aurora Bearing 319 Catalog PDFDocument128 paginiAurora Bearing 319 Catalog PDFYeÎncă nu există evaluări
- Rules 2019: 25 July 2018Document134 paginiRules 2019: 25 July 2018YeÎncă nu există evaluări
- Rules 2019: 25 July 2018Document134 paginiRules 2019: 25 July 2018YeÎncă nu există evaluări
- Telemetry in RacecarDocument142 paginiTelemetry in RacecarYeÎncă nu există evaluări
- Carroll Smith - Tune To Win OCRDocument173 paginiCarroll Smith - Tune To Win OCRJonathan BriggsÎncă nu există evaluări
- Elektropredenje Postopek Izdelave Nanovlaken PDFDocument9 paginiElektropredenje Postopek Izdelave Nanovlaken PDFAsif Fareed QaisraniÎncă nu există evaluări
- Solar SystemDocument15 paginiSolar SystemsupriyaÎncă nu există evaluări
- Determination of Sodium Hyaluronate in Pharmaceutical Formulations by HPLC - UVDocument6 paginiDetermination of Sodium Hyaluronate in Pharmaceutical Formulations by HPLC - UVjankiÎncă nu există evaluări
- Conbextra EP150 UAEDocument4 paginiConbextra EP150 UAEjasonÎncă nu există evaluări
- HDPE Production Via Slurry-Loop ProcessDocument1 paginăHDPE Production Via Slurry-Loop ProcessBramJanssen76100% (1)
- Thin Layer ChromatographyDocument14 paginiThin Layer ChromatographySonu RajputÎncă nu există evaluări
- Ultraviolet and Visible Absorption SpectrosDocument22 paginiUltraviolet and Visible Absorption SpectrosAIYODOT DOTÎncă nu există evaluări
- Prediction of Supercritical CO Solubility Using The Krichevsky - Ilinskaya Equation With 6 As An Adjustable ParameterDocument8 paginiPrediction of Supercritical CO Solubility Using The Krichevsky - Ilinskaya Equation With 6 As An Adjustable ParameterTiên PhạmÎncă nu există evaluări
- An Intelligent Feedback Controller Design For EnerDocument8 paginiAn Intelligent Feedback Controller Design For EnerJocian VefÎncă nu există evaluări
- Chapter 8 - Real GasesDocument10 paginiChapter 8 - Real Gasescarleston thurgoodÎncă nu există evaluări
- Extraction, Isolation, Purification and Identification CurcuminDocument16 paginiExtraction, Isolation, Purification and Identification CurcuminRaisyIkrimahÎncă nu există evaluări
- Fuck You DropboxDocument2 paginiFuck You DropboxRebecca DuncanÎncă nu există evaluări
- How To Study Biochemistry?Document1 paginăHow To Study Biochemistry?Prof.PTS96% (28)
- 10 Most Common Chrome Plating ProblemsDocument3 pagini10 Most Common Chrome Plating ProblemsRicardo GaringÎncă nu există evaluări
- Solar Energy Potential and Feasibility Study of A 10MW Grid-Connected Solar Plant in LibyaDocument10 paginiSolar Energy Potential and Feasibility Study of A 10MW Grid-Connected Solar Plant in LibyaArif Mateen AnsariÎncă nu există evaluări
- Catalysis Engineering - Multiple Choice Question-2023 (G I SV)Document14 paginiCatalysis Engineering - Multiple Choice Question-2023 (G I SV)chau0949859061Încă nu există evaluări
- Ijert Ijert: Behavior of Composite Nanofluids Under Extreme Pressure ConditionDocument8 paginiIjert Ijert: Behavior of Composite Nanofluids Under Extreme Pressure ConditionGK SinghÎncă nu există evaluări
- PH Series 1Document12 paginiPH Series 1Adam WijatmikoÎncă nu există evaluări
- Blending - IBCDocument2 paginiBlending - IBCRoyÎncă nu există evaluări
- 2012-05-11 Inorganic Chemistry PART 2Document40 pagini2012-05-11 Inorganic Chemistry PART 2Shaina OrnopiaÎncă nu există evaluări
- Heat Transfer Lab Experiment Report PDFDocument5 paginiHeat Transfer Lab Experiment Report PDFNasih AhmadÎncă nu există evaluări
- IA - Enthalpy of Displacement ReactionDocument5 paginiIA - Enthalpy of Displacement Reaction14nganhc1Încă nu există evaluări
- Phosphorylation Dependence and Stoichiometry of The Co - 2014 - Molecular - CellDocument14 paginiPhosphorylation Dependence and Stoichiometry of The Co - 2014 - Molecular - CellasdfweafsplashÎncă nu există evaluări
- General Chemistry 1 - Lesson 1 Additional NotesDocument65 paginiGeneral Chemistry 1 - Lesson 1 Additional NotesTerence John HoksuanÎncă nu există evaluări
- Chapter 4 Gas Condensate ReservoirsDocument34 paginiChapter 4 Gas Condensate ReservoirsMohammed Bahram100% (1)
- Chem T4 HLQDocument17 paginiChem T4 HLQWilliam NguyenÎncă nu există evaluări
- Lec 2Document63 paginiLec 2Ahmed ShaalanÎncă nu există evaluări
- A Consistent World Model For Consciousness and PhysicsDocument12 paginiA Consistent World Model For Consciousness and PhysicsGeorge PetreÎncă nu există evaluări
- Calendula DepilatoriaDocument1 paginăCalendula DepilatoriaCesar Augusto Altahona RojasÎncă nu există evaluări
- CHE-504 Lecture 2 Basics of IR Spectroscopy by Dr. Charu C. PantDocument22 paginiCHE-504 Lecture 2 Basics of IR Spectroscopy by Dr. Charu C. Pantabdelfattah oufÎncă nu există evaluări