S-ar putea să vă placă și
- APACHE / APACHE RTR/ RTR REF. / RTR EFI / NEW RTR REF. PARTS CATALOGUE CYLINDER HEAD ASSEMBLYDocument74 paginiAPACHE / APACHE RTR/ RTR REF. / RTR EFI / NEW RTR REF. PARTS CATALOGUE CYLINDER HEAD ASSEMBLYLukesh Kumar100% (2)
- Murphy Watchdog SchematicDocument18 paginiMurphy Watchdog SchematicDiegoTavaresÎncă nu există evaluări
- Introspective Hypnosis Class - 052017 - Antonio Sangio (2745)Document62 paginiIntrospective Hypnosis Class - 052017 - Antonio Sangio (2745)sandra100% (4)
- QESV2553 CS10 11 12 GC HRC Slides 022521Document103 paginiQESV2553 CS10 11 12 GC HRC Slides 022521Jairo PalaciosÎncă nu există evaluări
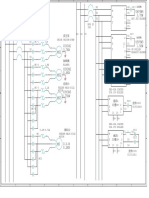
- DC Circuit For Generator AMFDocument2 paginiDC Circuit For Generator AMFYT ZhouÎncă nu există evaluări
- Platinum 7 Connection DiagramDocument1 paginăPlatinum 7 Connection DiagramroxtarÎncă nu există evaluări
- Wiring Diagram: DC GeneratorDocument1 paginăWiring Diagram: DC GeneratorAndi Ka100% (1)
- SLX 250 Side Door Elevator (Forum)Document2 paginiSLX 250 Side Door Elevator (Forum)Nguyen Van HieuÎncă nu există evaluări
- Instructions For Electrical Maintenance Technical Drawing (TD) SheetsDocument5 paginiInstructions For Electrical Maintenance Technical Drawing (TD) SheetsSatwik PandaÎncă nu există evaluări
- Mill Hitachi 2M Wiring DiagramDocument1 paginăMill Hitachi 2M Wiring DiagramcoronaqcÎncă nu există evaluări
- Bill of Material: Bottom ViewDocument1 paginăBill of Material: Bottom View민성규Încă nu există evaluări
- 2 SUBMERSIBLE PUMPS CONTROLDocument1 pagină2 SUBMERSIBLE PUMPS CONTROLahmed fathyÎncă nu există evaluări
- Jazz GK5 Starting System Circuit Diagram Build-In Type MICUDocument1 paginăJazz GK5 Starting System Circuit Diagram Build-In Type MICUTomyÎncă nu există evaluări
- Mapping Kabel Area ProduksiDocument3 paginiMapping Kabel Area ProduksiHarmawan SaranaprimaÎncă nu există evaluări
- E2 Box Solenoid TBDocument1 paginăE2 Box Solenoid TBkomiks0609Încă nu există evaluări
- CPU (IC801) : Kx-Ts3282Bxw: Block DiagramDocument1 paginăCPU (IC801) : Kx-Ts3282Bxw: Block DiagramkorodijÎncă nu există evaluări
- 2010 Picanto G 1.0 SohcDocument8 pagini2010 Picanto G 1.0 SohcPaul GudiñoÎncă nu există evaluări
- Schem e For Tie, Trafo, MotorDocument52 paginiSchem e For Tie, Trafo, Motormukesh_kht1Încă nu există evaluări
- Maintenance Instructions & Parts List: PTR/LTR Series ActuatorsDocument8 paginiMaintenance Instructions & Parts List: PTR/LTR Series Actuatorswaltsantos10Încă nu există evaluări
- Dol Starter With Remote Start and StopDocument1 paginăDol Starter With Remote Start and StopAthul AÎncă nu există evaluări
- Programme de Revision Des Equipements Annee - 2024: Page 1/1 Indice: 01 Date:31/12/2023 Enafor Smi - QhseDocument1 paginăProgramme de Revision Des Equipements Annee - 2024: Page 1/1 Indice: 01 Date:31/12/2023 Enafor Smi - QhseYassineÎncă nu există evaluări
- 90 150 KvaDocument2 pagini90 150 KvaEslSukkurÎncă nu există evaluări
- 4-1 Ubicacion Componentes ElectricosDocument2 pagini4-1 Ubicacion Componentes Electricoslevinton jose tobias genesÎncă nu există evaluări
- 4-1 Ubicacion Componentes Electricos PDFDocument2 pagini4-1 Ubicacion Componentes Electricos PDFlevinton jose tobias genesÎncă nu există evaluări
- RSP-1000 Maintenance Guide for Low Torque Plug ValvesDocument13 paginiRSP-1000 Maintenance Guide for Low Torque Plug ValvesAnonymous 45Ile4Încă nu există evaluări
- Technical specifications for MFI control systemDocument1 paginăTechnical specifications for MFI control systemHuy Trần QuốcÎncă nu există evaluări
- 2017 D 2.0 TCI-R D 2.0 TCI-R Schematic Diagrams Engine Electrical System Engine Control System Schematic DiagramsDocument1 pagină2017 D 2.0 TCI-R D 2.0 TCI-R Schematic Diagrams Engine Electrical System Engine Control System Schematic Diagramslyanna120168Încă nu există evaluări
- Toyota 1nz Trasnsmision AutomaticaDocument3 paginiToyota 1nz Trasnsmision AutomaticaCristhian Cazas100% (2)
- QSH4Q_1Document2 paginiQSH4Q_1domikass27Încă nu există evaluări
- Design Checked by Drawing Checked by Drawn by MMT SSR .Document10 paginiDesign Checked by Drawing Checked by Drawn by MMT SSR .mukesh_kht1Încă nu există evaluări
- M CH ĐènDocument2 paginiM CH ĐènTrần Ngọc CựuÎncă nu există evaluări
- Vista ExplodidaDocument1 paginăVista ExplodidaNelson Luís MarquesÎncă nu există evaluări
- Electrical panel diagram breakdownDocument1 paginăElectrical panel diagram breakdownLe Van TienÎncă nu există evaluări
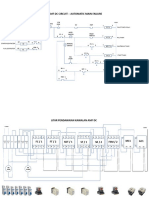
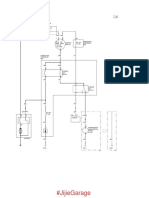
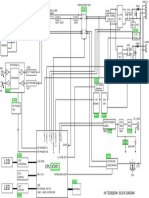
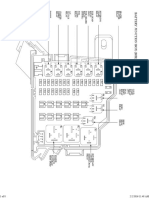
- A - C Control System - Autoo PDFDocument4 paginiA - C Control System - Autoo PDFANH LÊÎncă nu există evaluări
- Cargador Autom.6-12-24Document1 paginăCargador Autom.6-12-24jhonnyroaÎncă nu există evaluări
- Wiper/Washer, 320 Electric System SK29888 A 01Document3 paginiWiper/Washer, 320 Electric System SK29888 A 01АндрейÎncă nu există evaluări
- TO From Position Instrument Description Instrument Tag Instrument Terminal PlanDocument1 paginăTO From Position Instrument Description Instrument Tag Instrument Terminal PlanValipireddy NagarjunÎncă nu există evaluări
- Diagrama Electrico Minster 150Document9 paginiDiagrama Electrico Minster 150Victor Islas100% (1)
- Tone/Pulse Dialer with HandfreeDocument19 paginiTone/Pulse Dialer with HandfreebrsdiveÎncă nu există evaluări
- Dol StarterDocument1 paginăDol StarterrodinooÎncă nu există evaluări
- Dol StarterDocument1 paginăDol StarterrodinooÎncă nu există evaluări
- F77 - Service ManualDocument120 paginiF77 - Service ManualStas MÎncă nu există evaluări
- M CH Đèn Trư C Head LampDocument5 paginiM CH Đèn Trư C Head LampTrần Ngọc CựuÎncă nu există evaluări
- 2014 EcoSport - Cell 011 Fuse and Relay InformationDocument8 pagini2014 EcoSport - Cell 011 Fuse and Relay Informationsalamanc59Încă nu există evaluări
- Pictorial Diagram DiagramDocument1 paginăPictorial Diagram Diagramgt xÎncă nu există evaluări
- Pub028 063 00 0219Document2 paginiPub028 063 00 0219gabriel.nascimento2Încă nu există evaluări
- Final Target Date August 13 For All WorksDocument1 paginăFinal Target Date August 13 For All WorksAshley Bien FlorencioÎncă nu există evaluări
- Group 2 Electrical CircuitDocument23 paginiGroup 2 Electrical CircuitTaha RdmanÎncă nu există evaluări
- LWII-120 SCOD A040 中文 20210916Document9 paginiLWII-120 SCOD A040 中文 20210916DeniMestiWidiantoÎncă nu există evaluări
- LNS125 Mio M3 CylinderDocument1 paginăLNS125 Mio M3 Cylinderwa.onegtrÎncă nu există evaluări
- Canister Guard Bottom Load Upper Top Drive Safety Valve: NotesDocument1 paginăCanister Guard Bottom Load Upper Top Drive Safety Valve: NotesNasreddine SiaghÎncă nu există evaluări
- Global Service Way - Technical InformationDocument1 paginăGlobal Service Way - Technical InformationAsd ManÎncă nu există evaluări
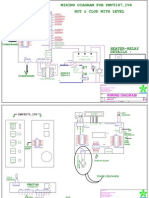
- Wiring Diagram For Pmv5187 - 1V8 Hot & Clod With Level: Load SectionDocument4 paginiWiring Diagram For Pmv5187 - 1V8 Hot & Clod With Level: Load Sectionsameer050680Încă nu există evaluări
- T105e Vega-R Cylinder HeadDocument1 paginăT105e Vega-R Cylinder HeadAlésaÎncă nu există evaluări
- 3500B Engine ControlsDocument120 pagini3500B Engine Controlssahruna japur100% (2)
- MachNguonLM2576 PDSPRJDocument1 paginăMachNguonLM2576 PDSPRJNguyễn Quốc HoàngÎncă nu există evaluări
- G 1.1 Sohc-01Document1 paginăG 1.1 Sohc-01Luis GarcíaÎncă nu există evaluări
- P94-1588 Diagrama Eléctrico KWDocument4 paginiP94-1588 Diagrama Eléctrico KWOswaldoÎncă nu există evaluări
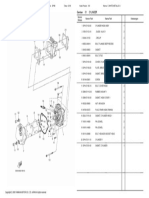
- Part Katalog X Ride PDFDocument45 paginiPart Katalog X Ride PDFAndre STAÎncă nu există evaluări
- Electric Terex TL 450Document19 paginiElectric Terex TL 450RICHARD100% (1)
- Konversi Acept TOEFLDocument1 paginăKonversi Acept TOEFLasrafilÎncă nu există evaluări
- Materi 4Document25 paginiMateri 4rayhantithoÎncă nu există evaluări
- CH 140203094220 Phpapp01Document54 paginiCH 140203094220 Phpapp01salicurriÎncă nu există evaluări
- CH 140203085002 Phpapp02Document58 paginiCH 140203085002 Phpapp02Adrian ReyesÎncă nu există evaluări
- Galvanometer Dynamic CharacteristicDocument10 paginiGalvanometer Dynamic CharacteristicrayhantithoÎncă nu există evaluări
- Case Study Safety Instrumented Burner Management System Si BmsDocument16 paginiCase Study Safety Instrumented Burner Management System Si Bmsrayhantitho100% (1)
- The Housekeeping Department: Learning Activity #1Document4 paginiThe Housekeeping Department: Learning Activity #1Limar Geoff G. RosalesÎncă nu există evaluări
- False CeilingDocument70 paginiFalse CeilingBharti Sikri93% (15)
- The Reference Frame - Nice Try But I Am Now 99% Confident That Atiyah's Proof of RH Is Wrong, HopelessDocument5 paginiThe Reference Frame - Nice Try But I Am Now 99% Confident That Atiyah's Proof of RH Is Wrong, Hopelesssurjit4123Încă nu există evaluări
- Map Book 4Document58 paginiMap Book 4executive engineerÎncă nu există evaluări
- Power and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Document1 paginăPower and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Ram KumarÎncă nu există evaluări
- DHP UM 015 IHP24 HART User ManualDocument70 paginiDHP UM 015 IHP24 HART User Manualkumar ambujÎncă nu există evaluări
- Industrial Visit Report - 08 09 2018Document11 paginiIndustrial Visit Report - 08 09 2018HARIKRISHNA MÎncă nu există evaluări
- Book 3: The SiphonophoresDocument29 paginiBook 3: The SiphonophoresRaquel SilvaÎncă nu există evaluări
- Event Rulebook Authorsgate 3.0 IEEE SB KUETDocument9 paginiEvent Rulebook Authorsgate 3.0 IEEE SB KUETKUET²⁰²¹Încă nu există evaluări
- Safety and Arming Device Timer 6-7-1976Document5 paginiSafety and Arming Device Timer 6-7-1976nguyenhÎncă nu există evaluări
- Chlorine (Free or Total) Manual For Test Kits CN-70, CN-70F, CN-70TDocument6 paginiChlorine (Free or Total) Manual For Test Kits CN-70, CN-70F, CN-70TDemétrius Ivo FernandesÎncă nu există evaluări
- "Smart Attendance Using F Ttendance Management Using Face Recognition" Anagement SystemDocument13 pagini"Smart Attendance Using F Ttendance Management Using Face Recognition" Anagement Systemamer HÎncă nu există evaluări
- Cahyadi J Malia Tugas MID TPODocument9 paginiCahyadi J Malia Tugas MID TPOCahyadi J MaliaÎncă nu există evaluări
- Reflection 4Document7 paginiReflection 4danilo miguelÎncă nu există evaluări
- T5N 630 PR221DS-LS/I in 630 3p F FDocument3 paginiT5N 630 PR221DS-LS/I in 630 3p F FDkalestÎncă nu există evaluări
- VSP BrochureDocument33 paginiVSP BrochuresudhakarrrrrrÎncă nu există evaluări
- 5054 s09 QP 1Document20 pagini5054 s09 QP 1Hany ElGezawyÎncă nu există evaluări
- Machine Guarding PrinciplesDocument5 paginiMachine Guarding Principlesliveconnectionz282Încă nu există evaluări
- Practical File Class XDocument5 paginiPractical File Class XJaiÎncă nu există evaluări
- FormatCARS KAAUH Alqahtani 106Document8 paginiFormatCARS KAAUH Alqahtani 106ZEYNOÎncă nu există evaluări
- Operator Interface SERIES 300 Device Platform EAGLE OS ET-316-TXDocument6 paginiOperator Interface SERIES 300 Device Platform EAGLE OS ET-316-TXDecoÎncă nu există evaluări
- Idea of CultureDocument28 paginiIdea of CultureGustavo Dias VallejoÎncă nu există evaluări
- Template Project Overview StatementDocument4 paginiTemplate Project Overview StatementArdan ArasÎncă nu există evaluări
- A.3s Scheme Used in Managing Epp ClassDocument35 paginiA.3s Scheme Used in Managing Epp Classpixie02100% (2)
- Types and Forms of CommunicationDocument22 paginiTypes and Forms of CommunicationayeshaÎncă nu există evaluări
- UAE Branch AGM 2018/19 ElectionsDocument6 paginiUAE Branch AGM 2018/19 ElectionsDavidÎncă nu există evaluări
- BS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Document30 paginiBS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Michael Camit EsoÎncă nu există evaluări
- Open Newel StaircaseDocument4 paginiOpen Newel StaircaseSujan Dhoj KhadkaÎncă nu există evaluări
- Communication Systems Engineering John G Proakis Masoud Salehi PDFDocument2 paginiCommunication Systems Engineering John G Proakis Masoud Salehi PDFKatie0% (2)