S-ar putea să vă placă și
- Anticlastic Action of Flat Sheets in BendingDocument5 paginiAnticlastic Action of Flat Sheets in Bendingalfakir fikriÎncă nu există evaluări
- Shell Strength of Conveyor Belt Pulleys - Theory and DesignDocument13 paginiShell Strength of Conveyor Belt Pulleys - Theory and DesignWilfredo BullonÎncă nu există evaluări
- Symmetrically Loaded Shells of Revolution in Membrane TheoryDocument17 paginiSymmetrically Loaded Shells of Revolution in Membrane TheoryAnca BirisÎncă nu există evaluări
- 1 Thin Shells PDFDocument16 pagini1 Thin Shells PDFMarcus Vinicius FaleiroÎncă nu există evaluări
- Lab 2 3-26-2015Document10 paginiLab 2 3-26-2015Niteesh KumarÎncă nu există evaluări
- The Effect of Initial Curvature On The Strength of An Inelastic ColumnDocument18 paginiThe Effect of Initial Curvature On The Strength of An Inelastic ColumnrjtcostaÎncă nu există evaluări
- Engineering Vibrations 3rd Edition Inman PDFDocument341 paginiEngineering Vibrations 3rd Edition Inman PDFAnonymous i6iMRM1C2100% (1)
- Bending A Cantilever Beam PDFDocument7 paginiBending A Cantilever Beam PDFNguyen Hai Dang TamÎncă nu există evaluări
- 4 - Bending of PlatesDocument14 pagini4 - Bending of PlatesTushar Vinay MehtaÎncă nu există evaluări
- On The Dynamics Os Plastic Circular Plated)Document14 paginiOn The Dynamics Os Plastic Circular Plated)yasameenÎncă nu există evaluări
- Stress and StrainDocument17 paginiStress and StrainakshatbhargavaÎncă nu există evaluări
- Timoshenko CoefficientDocument6 paginiTimoshenko CoefficientwarterflyÎncă nu există evaluări
- 2.elasticity Notes (Jan - 2022)Document7 pagini2.elasticity Notes (Jan - 2022)Gopi Chand RaoÎncă nu există evaluări
- Curved Beams C&yDocument17 paginiCurved Beams C&yfsirfan0% (1)
- Bab 8 - 1Document29 paginiBab 8 - 1M YusupÎncă nu există evaluări
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 paginiThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsmusic freakÎncă nu există evaluări
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 paginiThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsmusic freakÎncă nu există evaluări
- 69mead MarcusDocument13 pagini69mead MarcusPhamÎncă nu există evaluări
- 1960-Force and Moment Coefficients For Vibrating Aerofoils in CascadeDocument40 pagini1960-Force and Moment Coefficients For Vibrating Aerofoils in Cascadesh1999Încă nu există evaluări
- Buckling of Long, Regular TrussesDocument12 paginiBuckling of Long, Regular TrussesnctfatÎncă nu există evaluări
- Plate Buckling NotesDocument0 paginiPlate Buckling NotesSharyn PolleyÎncă nu există evaluări
- CH 13Document52 paginiCH 13LeonardoMadeira11Încă nu există evaluări
- Bending Stress of BeamsDocument18 paginiBending Stress of BeamsRambabu RÎncă nu există evaluări
- Finite Elements in ElasticityDocument45 paginiFinite Elements in ElasticityRajaram KamathÎncă nu există evaluări
- Experiment # 1 PDFDocument15 paginiExperiment # 1 PDFMuhammad ALI NoorÎncă nu există evaluări
- Bending Stress in BeamsDocument9 paginiBending Stress in BeamscataiceÎncă nu există evaluări
- NSEP Solved Paper 2008 PDFDocument11 paginiNSEP Solved Paper 2008 PDFapcc1Încă nu există evaluări
- On The Action of A Locomotive Driving WheelDocument7 paginiOn The Action of A Locomotive Driving WheelSantiago Naranjo AristizabalÎncă nu există evaluări
- Tutorial Sheet-I Fermat's Principle and Electromagnetic WavesDocument1 paginăTutorial Sheet-I Fermat's Principle and Electromagnetic Wavespriyanka choudharyÎncă nu există evaluări
- 1.1. STRESS: Figure ADocument27 pagini1.1. STRESS: Figure AJayÎncă nu există evaluări
- Notes TorsionDocument15 paginiNotes TorsionblehsadnjsÎncă nu există evaluări
- A Higher-Order Shear Deformation Theory of Laminated Elastic ShellsDocument12 paginiA Higher-Order Shear Deformation Theory of Laminated Elastic Shellsadel8888Încă nu există evaluări
- Centroids and Centre of GravityDocument31 paginiCentroids and Centre of Gravitysakshm guptaÎncă nu există evaluări
- Basic Elements of The Theory of Elasticity: 8.1 Plane State of StressDocument21 paginiBasic Elements of The Theory of Elasticity: 8.1 Plane State of StressBendis AmmÎncă nu există evaluări
- Torsion of Thin SectionsDocument18 paginiTorsion of Thin SectionsSyed Rizwan SaleemÎncă nu există evaluări
- Local, Distortional, and Euler Buckling of Thin-Walled ColumnsDocument17 paginiLocal, Distortional, and Euler Buckling of Thin-Walled ColumnsReaditReaditÎncă nu există evaluări
- Livro - Modern Compressible Flow (2) 81-160Document80 paginiLivro - Modern Compressible Flow (2) 81-160Antônio Jorge SesanaÎncă nu există evaluări
- Stress Tensor Lec.2Document24 paginiStress Tensor Lec.2Malak ShatiÎncă nu există evaluări
- Torsion IgnouDocument52 paginiTorsion IgnouUBAID KHANÎncă nu există evaluări
- MAE 212: Spring 2001 Module III: Material Property Characterization Using Strain Gage InstrumentationDocument7 paginiMAE 212: Spring 2001 Module III: Material Property Characterization Using Strain Gage InstrumentationChulbul PandeyÎncă nu există evaluări
- J R Rice - Path Independentt Integral - JAM68Document8 paginiJ R Rice - Path Independentt Integral - JAM68CJCONSTANTEÎncă nu există evaluări
- Global Riser Analysis MethodDocument20 paginiGlobal Riser Analysis MethodMario JacobsonÎncă nu există evaluări
- 1978 Applied Maths Higher Level Questions 1Document4 pagini1978 Applied Maths Higher Level Questions 1dawnÎncă nu există evaluări
- Tangential Residual StressesDocument4 paginiTangential Residual StressesMahmood MuftiÎncă nu există evaluări
- Thin Walled Pressure VesselDocument17 paginiThin Walled Pressure Vesselmahmudul adilÎncă nu există evaluări
- Uluslararasi Makale-3Document21 paginiUluslararasi Makale-3Ilkay BakirtasÎncă nu există evaluări
- Small-Deflection Plate Bending Theory 21Document1 paginăSmall-Deflection Plate Bending Theory 21elishirinÎncă nu există evaluări
- Orris 1973Document20 paginiOrris 1973Supantho ChaudhuriÎncă nu există evaluări
- Naca Tech - Criticalstressof PlatecolumnsDocument17 paginiNaca Tech - Criticalstressof PlatecolumnsPedro GalvaniÎncă nu există evaluări
- Solid MechanicsDocument18 paginiSolid MechanicsPrayush RajbhandariÎncă nu există evaluări
- Strength of MaterialDocument163 paginiStrength of MaterialJackKiaÎncă nu există evaluări
- An Extension of Casson's Invariant. (AM-126), Volume 126De la EverandAn Extension of Casson's Invariant. (AM-126), Volume 126Încă nu există evaluări
- Constructed Layered Systems: Measurements and AnalysisDe la EverandConstructed Layered Systems: Measurements and AnalysisÎncă nu există evaluări
- Cartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionDe la EverandCartesian Tensors in Engineering Science: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionÎncă nu există evaluări
- Seminar on Micro-Local Analysis. (AM-93), Volume 93De la EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Încă nu există evaluări
- LOAD COMBINATION FOR ULS (Foundamental Combinaiton) : Dead, Imposed (Earth/water) Dead and Wind (Earth/water)Document20 paginiLOAD COMBINATION FOR ULS (Foundamental Combinaiton) : Dead, Imposed (Earth/water) Dead and Wind (Earth/water)Nhân NguyễnÎncă nu există evaluări
- NindxDocument15 paginiNindxNhân NguyễnÎncă nu există evaluări
- Preface To The Second EditionDocument2 paginiPreface To The Second EditionNhân NguyễnÎncă nu există evaluări
- SindxDocument32 paginiSindxNhân NguyễnÎncă nu există evaluări
- Theory of Elastic Stability: Stephen Timoshenko James GereDocument2 paginiTheory of Elastic Stability: Stephen Timoshenko James GereNhân NguyễnÎncă nu există evaluări
- Notations: (C GJ) (CI EC.) Eha/l2Document2 paginiNotations: (C GJ) (CI EC.) Eha/l2Nhân NguyễnÎncă nu există evaluări
- The Battle of WaterlooDocument14 paginiThe Battle of Waterlooana zetinaÎncă nu există evaluări
- Christina Bashford, Historiography and Invisible Musics Domestic Chamber Music in Nineteenth-Century BritainDocument71 paginiChristina Bashford, Historiography and Invisible Musics Domestic Chamber Music in Nineteenth-Century BritainVd0Încă nu există evaluări
- Dragon Magazine #106Document100 paginiDragon Magazine #106Stephen Cameron100% (3)
- Act 5, Scene 1Document3 paginiAct 5, Scene 1Arihant KumarÎncă nu există evaluări
- Edward Howard CVDocument5 paginiEdward Howard CVEd HowardÎncă nu există evaluări
- Meyendorf-Ortodoxie CatolicitateDocument90 paginiMeyendorf-Ortodoxie Catolicitateandreidirlau1Încă nu există evaluări
- حقيبة الرسم الفني لتقنية اللحام PDFDocument63 paginiحقيبة الرسم الفني لتقنية اللحام PDFmahmoud aliÎncă nu există evaluări
- J Robison 103 02 Note Taking GuideDocument4 paginiJ Robison 103 02 Note Taking Guideapi-335814341Încă nu există evaluări
- Patents OnlyDocument19 paginiPatents OnlyJanine SalvioÎncă nu există evaluări
- The Tibu PeopleDocument21 paginiThe Tibu PeopleAshBarlowÎncă nu există evaluări
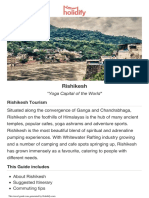
- Rishikesh: "Yoga Capital of The World"Document19 paginiRishikesh: "Yoga Capital of The World"Mahek PoladiaÎncă nu există evaluări
- Sienna Mynx-Black Butterfly - SexChecksFinalDocument9 paginiSienna Mynx-Black Butterfly - SexChecksFinalLaura Rosales100% (2)
- Aspiration of MaitreyaDocument2 paginiAspiration of MaitreyaAnton BjerkeÎncă nu există evaluări
- SocksanditsmanufacturingDocument9 paginiSocksanditsmanufacturingMian ShoaibÎncă nu există evaluări
- Landsat Manual 1 - Revised2019Document6 paginiLandsat Manual 1 - Revised2019ខេល ខេមរិន្ទÎncă nu există evaluări
- 7 Habits That Will Change Your Life PDFDocument198 pagini7 Habits That Will Change Your Life PDFppppppp0Încă nu există evaluări
- An Unsuitable Boy PDFDocument2 paginiAn Unsuitable Boy PDFShagun GuptaÎncă nu există evaluări
- What Is Metafiction and Why Are They Saying Such Awful Things About It?Document3 paginiWhat Is Metafiction and Why Are They Saying Such Awful Things About It?Adrian DiazÎncă nu există evaluări
- Online Shopping 8 December 2011: BBC Learning English 6 Minute EnglishDocument6 paginiOnline Shopping 8 December 2011: BBC Learning English 6 Minute Englishjorgmarta2952Încă nu există evaluări
- Banarasi Sari#Document7 paginiBanarasi Sari#SHIKHA SINGHÎncă nu există evaluări
- A.I (Alien Invasion) Guard: Android-Based Tower Defense GameDocument16 paginiA.I (Alien Invasion) Guard: Android-Based Tower Defense GameMeyoor OneacÎncă nu există evaluări
- Archie: Best of Harry Lucey, Vol. 2 PreviewDocument11 paginiArchie: Best of Harry Lucey, Vol. 2 PreviewGraphic Policy50% (2)
- Mantras Om or Aum and The Gayatri MantraDocument131 paginiMantras Om or Aum and The Gayatri MantraFrancis Lobo67% (3)
- Lesson 3.1 Jesus, The Epitome of A Prophet's Fate MartyrdomDocument5 paginiLesson 3.1 Jesus, The Epitome of A Prophet's Fate MartyrdomBianca MistalÎncă nu există evaluări
- Electrical System: Ef & Ec SectionDocument50 paginiElectrical System: Ef & Ec SectionRidwan syahÎncă nu există evaluări
- E SiddalDocument9 paginiE SiddalWilliams D CHÎncă nu există evaluări
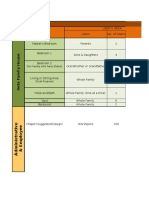
- Space Programming: Area/Space User'S Area Users No. of UsersDocument6 paginiSpace Programming: Area/Space User'S Area Users No. of UsersMary Rose CabidesÎncă nu există evaluări
- Carbon Alloy SteelDocument2 paginiCarbon Alloy SteelDeepak HoleÎncă nu există evaluări
- Mindset Reset 2019 PDFDocument10 paginiMindset Reset 2019 PDFAdina100% (1)