S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- c15 ldn01610 SchematicDocument4 paginic15 ldn01610 SchematicJacques Van Niekerk50% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Legal DraftingDocument28 paginiLegal Draftingwadzievj100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- MFS Cookbook 1.1 ENDocument153 paginiMFS Cookbook 1.1 ENArunGanesh100% (7)
- Hydrostatic Pressure Test Safety ChecklistDocument3 paginiHydrostatic Pressure Test Safety ChecklistJerry Faria60% (5)
- WSM - Ziale - Commercial Law NotesDocument36 paginiWSM - Ziale - Commercial Law NotesElizabeth Chilufya100% (1)
- Notes in Train Law PDFDocument11 paginiNotes in Train Law PDFJanica Lobas100% (1)
- 1.SITXWHS003 Student Assessment Tasks 1Document58 pagini1.SITXWHS003 Student Assessment Tasks 1Yashaswi GhimireÎncă nu există evaluări
- Forest Fire Detection Using Optimized Solar Powered Zigbee Wireless Sensor Networks PDFDocument11 paginiForest Fire Detection Using Optimized Solar Powered Zigbee Wireless Sensor Networks PDFasraÎncă nu există evaluări
- Evaluating The Procurement Strategy Adopted in The Scottish Holyrood Parliament Building ProjectDocument13 paginiEvaluating The Procurement Strategy Adopted in The Scottish Holyrood Parliament Building ProjectNnamdi Eze100% (4)
- Ranator 2Document4 paginiRanator 2ArunGaneshÎncă nu există evaluări
- Ranator 4Document4 paginiRanator 4ArunGaneshÎncă nu există evaluări
- Ranator 3Document1 paginăRanator 3ArunGaneshÎncă nu există evaluări
- Ranator 1Document5 paginiRanator 1ArunGaneshÎncă nu există evaluări
- Girl Meets BoyDocument34 paginiGirl Meets Boyglendha100% (8)
- Rhymes and Songs For Babies and Toddlers: Compiled by The Staff at The Pewaukee Public LibraryDocument9 paginiRhymes and Songs For Babies and Toddlers: Compiled by The Staff at The Pewaukee Public LibrarynatttalyÎncă nu există evaluări
- Swamiyae Sharanam AyyappaDocument1 paginăSwamiyae Sharanam AyyappaArunGaneshÎncă nu există evaluări
- Final SapDocument3 paginiFinal SapArunGaneshÎncă nu există evaluări
- Nursery Rhymes 1Document26 paginiNursery Rhymes 1StevieÎncă nu există evaluări
- Rhymes and Songs For Babies and Toddlers: Compiled by The Staff at The Pewaukee Public LibraryDocument9 paginiRhymes and Songs For Babies and Toddlers: Compiled by The Staff at The Pewaukee Public LibrarynatttalyÎncă nu există evaluări
- SelectionsDocument28 paginiSelectionsBunny LykaÎncă nu există evaluări
- Swamiyae Sharanam AyyappaDocument1 paginăSwamiyae Sharanam AyyappaArunGaneshÎncă nu există evaluări
- AnilDocument1 paginăAnilArunGaneshÎncă nu există evaluări
- PoetryDocument1 paginăPoetryArunGaneshÎncă nu există evaluări
- TestingDocument1 paginăTestingArunGaneshÎncă nu există evaluări
- Employee FormDocument8 paginiEmployee FormArunGaneshÎncă nu există evaluări
- Smrtforms and SmrtstylesDocument1 paginăSmrtforms and SmrtstylesArunGaneshÎncă nu există evaluări
- AngerDocument28 paginiAngerRohit BediÎncă nu există evaluări
- 2marks SapDocument71 pagini2marks SapArunGaneshÎncă nu există evaluări
- ITS Mobile RelatedDocument1 paginăITS Mobile RelatedArunGaneshÎncă nu există evaluări
- Axial-Flowm Icroturbiwniet H Electromagnegtenicer AtorDocument4 paginiAxial-Flowm Icroturbiwniet H Electromagnegtenicer AtorMuhammad Muzammil EjazÎncă nu există evaluări
- Scada in Power SystemsDocument1 paginăScada in Power SystemsArunGaneshÎncă nu există evaluări
- Scada in Power SystemsDocument1 paginăScada in Power SystemsArunGaneshÎncă nu există evaluări
- Ss 2 MarksDocument18 paginiSs 2 MarksArunGaneshÎncă nu există evaluări
- Maths 1st Assignment QuestionsDocument1 paginăMaths 1st Assignment QuestionsArunGaneshÎncă nu există evaluări
- BSNL PRBT IMImobile HPDocument13 paginiBSNL PRBT IMImobile HPMithil AgrawalÎncă nu există evaluări
- DM2 0n-1abDocument6 paginiDM2 0n-1abyus11Încă nu există evaluări
- Turn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Document11 paginiTurn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Meet MehtaÎncă nu există evaluări
- Workbook, Exercises-Unit 8Document6 paginiWorkbook, Exercises-Unit 8Melanie ValdezÎncă nu există evaluări
- LSM - Neutral Axis Depth CalculationDocument2 paginiLSM - Neutral Axis Depth CalculationHimal KafleÎncă nu există evaluări
- 8th Mode of FinancingDocument30 pagini8th Mode of FinancingYaseen IqbalÎncă nu există evaluări
- Fss Operators: Benchmarks & Performance ReviewDocument7 paginiFss Operators: Benchmarks & Performance ReviewhasanmuskaanÎncă nu există evaluări
- Lampiran Surat 739Document1 paginăLampiran Surat 739Rap IndoÎncă nu există evaluări
- 2012 Brochure Keltan Final en PDFDocument20 pagini2012 Brochure Keltan Final en PDFJorge Zegarra100% (1)
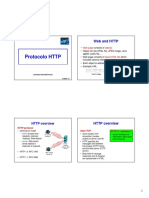
- HTTP ProtocolDocument16 paginiHTTP ProtocolHao NguyenÎncă nu există evaluări
- 2015 Paper 2 Specimen Paper PDFDocument10 pagini2015 Paper 2 Specimen Paper PDFAhmad Osama MashalyÎncă nu există evaluări
- Instruction Manual Series 880 CIU Plus: July 2009 Part No.: 4416.526 Rev. 6Document44 paginiInstruction Manual Series 880 CIU Plus: July 2009 Part No.: 4416.526 Rev. 6nknico100% (1)
- Application For New Ration Card - Telangana & AP StatesDocument1 paginăApplication For New Ration Card - Telangana & AP Statesping2gopiÎncă nu există evaluări
- Feasibility Report, Modhumoti, Rev. - April-.2015-1Document19 paginiFeasibility Report, Modhumoti, Rev. - April-.2015-1Jahangir RaselÎncă nu există evaluări
- 20091216-153551-APC Smart-UPS 1500VA USB SUA1500IDocument4 pagini20091216-153551-APC Smart-UPS 1500VA USB SUA1500Ifietola1Încă nu există evaluări
- Aircraft Materials and Hardware: (Nuts, Studs, Screws)Document25 paginiAircraft Materials and Hardware: (Nuts, Studs, Screws)PakistaniTalent cover songsÎncă nu există evaluări
- OpenShift Container Platform-4.6-Installing On vSphere-en-USDocument189 paginiOpenShift Container Platform-4.6-Installing On vSphere-en-USChinni MunniÎncă nu există evaluări
- Exercise 3 - Binary Coded DecimalDocument3 paginiExercise 3 - Binary Coded DecimalNaiomi RaquinioÎncă nu există evaluări
- Annex B Brochure Vector and ScorpionDocument4 paginiAnnex B Brochure Vector and ScorpionomarhanandehÎncă nu există evaluări
- Marketing Theory and PracticesDocument4 paginiMarketing Theory and PracticesSarthak RastogiÎncă nu există evaluări
- Travel Insurance CertificateDocument9 paginiTravel Insurance CertificateMillat PhotoÎncă nu există evaluări
- Chapter 5Document20 paginiChapter 5Berihu GirmayÎncă nu există evaluări
- TelekomDocument2 paginiTelekomAnonymous eS7MLJvPZCÎncă nu există evaluări