S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- InfraredDocument9 paginiInfraredPaculba Louigi IgdonÎncă nu există evaluări
- PlainDocument1 paginăPlainhsujustinÎncă nu există evaluări
- Lecture1 IntroductionDocument83 paginiLecture1 IntroductionhsujustinÎncă nu există evaluări
- Linear AlgebraDocument19 paginiLinear AlgebrahsujustinÎncă nu există evaluări
- Hmwk#6Document1 paginăHmwk#6hsujustinÎncă nu există evaluări
- 19 Homework 6.3Document2 pagini19 Homework 6.3hsujustinÎncă nu există evaluări
- X4 Review AnswersDocument6 paginiX4 Review AnswershsujustinÎncă nu există evaluări
- Ps 0Document2 paginiPs 0hsujustinÎncă nu există evaluări
- Greensheet 19Document2 paginiGreensheet 19hsujustinÎncă nu există evaluări
- Lab3 MSA RelationshipsDocument11 paginiLab3 MSA RelationshipshsujustinÎncă nu există evaluări
- Lecture1 IntroductionDocument83 paginiLecture1 IntroductionhsujustinÎncă nu există evaluări
- ProbabilityDocument41 paginiProbabilitySaleha ShakoorÎncă nu există evaluări
- CS10 Ch6 LectureDocument23 paginiCS10 Ch6 LecturehsujustinÎncă nu există evaluări
- Data Structures & Algorithms: TreesDocument94 paginiData Structures & Algorithms: TreeshsujustinÎncă nu există evaluări
- Assignment 0: R Bootcamp: Turn in DeadlineDocument2 paginiAssignment 0: R Bootcamp: Turn in DeadlinehsujustinÎncă nu există evaluări
- ChatterbotDocument5 paginiChatterbothsujustinÎncă nu există evaluări
- Assignment 0: R Bootcamp: Turn in DeadlineDocument2 paginiAssignment 0: R Bootcamp: Turn in DeadlinehsujustinÎncă nu există evaluări
- Lab4 MSA Forms ReportsDocument10 paginiLab4 MSA Forms ReportshsujustinÎncă nu există evaluări
- Economics of SpeedDocument54 paginiEconomics of SpeedhsujustinÎncă nu există evaluări
- Cycle TimeDocument14 paginiCycle TimehsujustinÎncă nu există evaluări
- Cycle TimeDocument14 paginiCycle TimehsujustinÎncă nu există evaluări
- Course OutlineDocument2 paginiCourse OutlinehsujustinÎncă nu există evaluări
- Photo DiodeDocument3 paginiPhoto DiodeAngga Wijaya KusumaÎncă nu există evaluări
- Atomic Structure & Groups TrendsDocument21 paginiAtomic Structure & Groups TrendsKevin Neva arbaniiÎncă nu există evaluări
- SUMMATIVE TEST IN SCIENCE 7 Week 1 & 2Document5 paginiSUMMATIVE TEST IN SCIENCE 7 Week 1 & 2Esther Mae Ann Trugillo100% (4)
- X-Ray DiffractionDocument30 paginiX-Ray DiffractionMerve Ayvaz KöroğluÎncă nu există evaluări
- Chapter 14.2 SummaryDocument3 paginiChapter 14.2 Summary2660787Încă nu există evaluări
- Mod 4 NotesDocument9 paginiMod 4 NotesNancyÎncă nu există evaluări
- Chapter 4Document15 paginiChapter 4Yiinjian LowÎncă nu există evaluări
- Arjuna Chemical Bonding Advanced SeriesDocument101 paginiArjuna Chemical Bonding Advanced Seriesagarwalaviral485Încă nu există evaluări
- Quantum Dots - An Experiment W For Physical or Materials Chemistry PDFDocument3 paginiQuantum Dots - An Experiment W For Physical or Materials Chemistry PDFNicolás GrinbergÎncă nu există evaluări
- Engineering Physics LAB SyllabusDocument2 paginiEngineering Physics LAB Syllabusharsh dubeyÎncă nu există evaluări
- BFW Light Sources Headlights 2020Document4 paginiBFW Light Sources Headlights 2020Daniela GuzmánÎncă nu există evaluări
- AMO Sheet7Document3 paginiAMO Sheet7Ismael CastilloÎncă nu există evaluări
- Pure Substances MixturesDocument2 paginiPure Substances MixturesShannen Abegail FernandezÎncă nu există evaluări
- Radiation (Lecture Slides) PDFDocument41 paginiRadiation (Lecture Slides) PDFThe DudeÎncă nu există evaluări
- Soal InstrumenDocument7 paginiSoal InstrumenErvin CrespoÎncă nu există evaluări
- Physics Part 2 E.V PDFDocument5 paginiPhysics Part 2 E.V PDFShira YukiÎncă nu există evaluări
- Quantum NumbersDocument2 paginiQuantum NumbersWong Weng SiongÎncă nu există evaluări
- 4th Unit Test Grade 8Document30 pagini4th Unit Test Grade 8Ella Mae CabungcalÎncă nu există evaluări
- Atoms, Molecules, and IonsDocument54 paginiAtoms, Molecules, and Ionsarsekerci813601Încă nu există evaluări
- The One ColourDocument107 paginiThe One ColourancaÎncă nu există evaluări
- Assignment 1.: N C DK DWDocument10 paginiAssignment 1.: N C DK DWjuÎncă nu există evaluări
- MSC Final Chemistry p1 Application of Spectroscopy Photochemistry 2017 18Document4 paginiMSC Final Chemistry p1 Application of Spectroscopy Photochemistry 2017 18vnbmÎncă nu există evaluări
- Hollow Prism Physics Investigatory Project Class 12 CBSEDocument12 paginiHollow Prism Physics Investigatory Project Class 12 CBSEJaani RaghavanÎncă nu există evaluări
- Vrayforc4D Physical Camera - : A Rough Guide For Architectural RenderingDocument4 paginiVrayforc4D Physical Camera - : A Rough Guide For Architectural RenderingjohnautodidacteÎncă nu există evaluări
- scp-3430h Datasheet PDFDocument2 paginiscp-3430h Datasheet PDFurbano46190bisÎncă nu există evaluări
- Which Statement(s) Is/are Generally True About The Melting Points of Substances? Different TopicDocument3 paginiWhich Statement(s) Is/are Generally True About The Melting Points of Substances? Different TopicDaÎncă nu există evaluări
- A-Single-Bandpass-Tunable-Photonic-Transversal-Filter-Based-On-Abroadband Optical Source and A Mach-Zehnder InterferometerDocument4 paginiA-Single-Bandpass-Tunable-Photonic-Transversal-Filter-Based-On-Abroadband Optical Source and A Mach-Zehnder InterferometerDIDDI PAVITRA VARSHAÎncă nu există evaluări
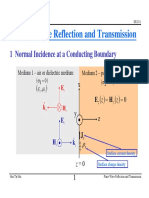
- Plane Wave Reflection and TransmissionDocument33 paginiPlane Wave Reflection and TransmissionIbrahim KhleifatÎncă nu există evaluări
- Physics Investigatory ProjectDocument20 paginiPhysics Investigatory Project02 ABHINAV X-GÎncă nu există evaluări