S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Lecture 3 Data Structure StackDocument33 paginiLecture 3 Data Structure StackSello HlabeliÎncă nu există evaluări
- Ad PatchDocument7 paginiAd Patchapi-3741317100% (1)
- Stored ProceduresDocument17 paginiStored ProceduresManoj VarmaÎncă nu există evaluări
- Java10 PDFDocument137 paginiJava10 PDFswarup sarkarÎncă nu există evaluări
- UVM Harness WhitepaperDocument12 paginiUVM Harness WhitepaperSujith Paul VargheseÎncă nu există evaluări
- Parallel ComputingDocument241 paginiParallel Computingalan_du22645100% (1)
- Normalization AssignmentDocument6 paginiNormalization AssignmentNazÎncă nu există evaluări
- BIO315 Test Prep 6Document3 paginiBIO315 Test Prep 6kenwinshikaaÎncă nu există evaluări
- Introduction To Programming Using C Language Lesson - 1 Output - Input FunctionsDocument265 paginiIntroduction To Programming Using C Language Lesson - 1 Output - Input FunctionsMahmoudÎncă nu există evaluări
- CSC 212 - Operating SystemDocument115 paginiCSC 212 - Operating SystemObiwusi KolawoleÎncă nu există evaluări
- SC Exp1 ShrutiDocument7 paginiSC Exp1 ShrutiShruti TyagiÎncă nu există evaluări
- Code To Extract Plain Text From A PDF File - CodeProjectDocument5 paginiCode To Extract Plain Text From A PDF File - CodeProjectchegun MouleroÎncă nu există evaluări
- Program For ADC 0808 Connecting Temperature Sensor Using 8051Document13 paginiProgram For ADC 0808 Connecting Temperature Sensor Using 8051Kishore KumarÎncă nu există evaluări
- Problem Solving: Algorithms and FlowchartsDocument19 paginiProblem Solving: Algorithms and Flowchartssyed abdullahÎncă nu există evaluări
- Priya - Experience Resume 3.5Document3 paginiPriya - Experience Resume 3.5priyanka rathodÎncă nu există evaluări
- Oracle Database 12c TimesTen In-Memory Database Java Developer's Guide PDFDocument112 paginiOracle Database 12c TimesTen In-Memory Database Java Developer's Guide PDFBupBeChanhÎncă nu există evaluări
- Control Statements in RDocument34 paginiControl Statements in Rajith kumar n.k.bÎncă nu există evaluări
- How To Use EpsilonDocument22 paginiHow To Use EpsilonKarthikeyan SankaranÎncă nu există evaluări
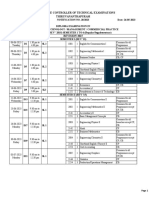
- Time Table - April - 2023 - Rev15Document10 paginiTime Table - April - 2023 - Rev15vinithrajÎncă nu există evaluări
- 5Document3 pagini5surya pandyaÎncă nu există evaluări
- AWS LambdaDocument1.004 paginiAWS LambdalakshmiescribdÎncă nu există evaluări
- LR Protocol ConfigurationDocument64 paginiLR Protocol Configurationanu224149Încă nu există evaluări
- Adding Features CSharpDocument38 paginiAdding Features CSharpVilciu ConstantinÎncă nu există evaluări
- File - 884729453 - 1694060717 - Stack&queue 10 MCQDocument3 paginiFile - 884729453 - 1694060717 - Stack&queue 10 MCQRakesh SÎncă nu există evaluări
- Assignment 2: 1 Context-Free GrammarsDocument5 paginiAssignment 2: 1 Context-Free GrammarsRahul SinghÎncă nu există evaluări
- Remote Procedure CallDocument6 paginiRemote Procedure CallJoshuaÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument12 paginiNew Microsoft Office Word DocumentRamana VaralaÎncă nu există evaluări
- CDocument32 paginiCMousmiÎncă nu există evaluări
- Amit RESUME ModifiedDocument2 paginiAmit RESUME Modifiedanislinek15Încă nu există evaluări
- Procedure: Stack Operations Stack OperationsDocument21 paginiProcedure: Stack Operations Stack OperationsDaniel GastonÎncă nu există evaluări