Documente Academic
Documente Profesional
Documente Cultură
Nettoyage en Place
Încărcat de
Mourad RabahDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Nettoyage en Place
Încărcat de
Mourad RabahDrepturi de autor:
Formate disponibile
SEABG
Introduction générale
« Valider un procédé de nettoyage, c’est démontrer de manière scientifique et
documentée, que les différentes étapes de ce procédé permettent d’obtenir dans des
conditions préétablies une surface ne comportant pas de contamination résiduelle
supérieure à une limite préalablement fixée, ceci de manière reproductible »
Commission SFSTP, Validation du nettoyage, 1996
La maîtrise des procédés de fabrication dans l’industrie agro-alimentaire exige une
rigueur croissante à fin d’assurer la pureté des produits. Ainsi Le nettoyage occupe une
position clé dans la lutte contre les risques de contamination qui peuvent être chimiques ou
microbiologiques. Il est, par conséquent, garant de la qualité du produit fabriqué.
Il est primordial pour l’entreprise d’optimiser ses propres procédés de nettoyage, et ce
aussi bien au niveau de la formulation des procédures que dans leurs applications. En effet,
tout procédé de nettoyage non maîtrisé entraîne inévitablement une augmentation des coûts de
production.
Ainsi, la procédure de nettoyage doit être formulée de manière rationnelle afin de
permettre non seulement de maîtriser la qualité du produit fini, mais également de mieux
connaître les équipements et d’anticiper les éventuels problèmes pouvant subvenir.
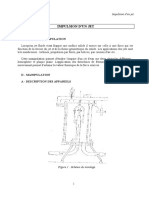
La Société des Emballages Aluminium Boissons Gazeuse est sollicité à ce type de
procédure qui est assurée actuellement d’une manière manuelle. Afin de faciliter cette tâche,
elle m’a confié la réalisation du projet d’automatisation de la procédure de nettoyage en place
employée au niveau du système de production des boissons alcoolisées.
L’objectif de mon projet de fin d’étude est la création d’un processus automatisée qui
tient compte des paramètres capitaux du nettoyage en place à savoir : la concentration, la
pression, le temps de contact et la température, ayant pour but de garantir une bonne qualité
du produit fini, ainsi qu’une bonne gestion de la consommation de l’eau et des détergents et
de préserver l’environnement de l’entreprise.
1 Automatisation d’une centrale C.I.P
SEABG
Ce rapport est composé de quatre chapitres. Dans le premier chapitre, nous décrivons la
procédure de nettoyage en ligne à automatiser, son application actuelle et les éventuelles
améliorations à effectuer ainsi que la présentation technique du processus de production
étudié. Puis, dans le deuxième chapitre, nous commençons par présenter un modèle graphique
ordonnançant les différents cycles du NEP et permettant la gestion des modes de marche et
arrêt, à savoir les « Grafcets » et le guide graphique de gestion des modes de marche et d’arrêt
« Gemma ». Ensuite, nous déterminons des approximations des paramètres du régulateur de
température à programmer en utilisant une modélisation d’un échangeur thermique. Le
troisième chapitre, fait l’objet de la description et la validation du programme réalisé avec
STEP7. Enfin, le quatrième chapitre est consacré à la conception et l’implémentation d’une
application-pupitre permettant le suivi et la commande de la procédure de nettoyage.
2 Automatisation d’une centrale C.I.P
SEABG
Présentation de la société SEABG
• S.E.A.B.G : La Société des Emballages Aluminium et Boissons Gazeuses.
• Elle appartient au groupe S.F.B.T (Société de Frigorifique et Brasserie de
Tunis)
• Siège social et bureaux : Bab Saadoun – Tunis Tel : 71 896 447
• Usine : Zone Industrielle 8040. Bouargoub. Tunisie
• Tél : 72 259 632 / 72 259 257 Télex : 15 432 Téléfax : 72 259 688
• P.D.G : M.MOHAMED BOUSBIA
• Date de crèation: 1987
• Capital : 27 500 000 DT
• Registre de commerce : 52516
• Matricule Fiscale : 30142.F.A.M.000
• Activités :
- Mise en boite des bières (Celtia,…)
- Mise en boite des boissons gazeux (Coca-Cola, Fanta, Sprite, Boga…)
- Fabrication des jus (Miami, Plus, Rea….)
• Effectifs : 160 personnes (ingénieurs, techniciens, ouvriers)
• Capacité de production :
- Ligne SASIB1 : 32 000 boites / heure
- Ligne SASIB2 : 52000 boites / heure
- Ligne jus: 6000 U/h – 7500 U/h
3 Automatisation d’une centrale C.I.P
SEABG
Chapitre I :
Nettoyage en Place
4 Automatisation d’une centrale C.I.P
SEABG
Introduction
De nos jours, l’entreprise est confrontée à des multiples problèmes dont notamment la
bonne pratique des opérations de nettoyage en place, l’évacuation des déchets toxiques et leur
impact sur l’environnement.
Ce chapitre contient des éléments de réponse à ces problèmes. Nous commençons par
définir le terme « nettoyage en place » puis nous décortiquons la centrale de nettoyage en
place actuelle, pour aboutir à la fin à une description de l’installation de nettoyage en place
que nous proposons.
1.1. Le nettoyage en place (NEP)
1.1.1. Qu’est ce qu’une NEP ?
Nettoyage en place (NEP), ou encore Cleaning In Place (CIP) est un terme utilisé dans
les industries alimentaires et pharmaceutiques qui signifie, comme le nom l’indique, que les
équipements peuvent être nettoyés sans devoir être démontés ou mobilisés.
Les systèmes NEP offrent un nettoyage rapide, efficace et fiable pour tous les types de
processus des entreprises.
1.1.2. Pourquoi le nettoyage ?
Selon l’AFNOR (Norme 50-109), « le nettoyage est une opération qui consiste à
éliminer, dans une surface donnée, toute souillure visible ou invisible pouvant s’y trouvée. »
Les opérations de nettoyage ont pour objectif d’éliminer de manière efficace tout traces
de souillures ou contaminations. Les souillures peuvent être d’origine chimiques, particulaires
ou microbiologiques.
La nature des souillures va directement paramétrer le nettoyage aussi bien au niveau du
détergent utilisé ainsi que la manière technique selon laquelle le nettoyage est réalisé.
D’une manière générale, on peut noter que :
- Plus la souillure est petite, plus la surface à nettoyer sera forte.
5 Automatisation d’une centrale C.I.P
SEABG
- Plus le délai d’intervention après la production est important, plus la souillure est
difficile à éliminer.
- La rugosité (partie saillante de la surface inégale) du matériel a un impact important
sur la réalisation du nettoyage.
L’état final du matériel après nettoyage est directement lié à la nature de la souillure, à
la nature du détergent utilisé, à la configuration du matériel, ainsi qu’à la manière dont le
nettoyage est réalisé.
1.1.3. Mécanisme de nettoyage
La détergence met en oeuvre un processus physicochimique selon lequel les salissures
ou souillures sont détachées de leur substrat ou support et mises en solution ou dispersion.
Ainsi un détergent est un composé chimique, qui, associé à des facteurs physiques
(temps, température, action mécanique) permet de débarrasser une surface de sa souillure.
Cela engendre l’apparition de trois interfaces (Figure 1):
• Surface – souillure
• Souillure – détergent
• Détergent – surface
Ainsi il co-existe dans tout nettoyage :
• Une phase solide correspondant à la surface souillée
• Une phase liquide ou solide correspondant à la souillure
• Une phase liquide correspondant à la solution de nettoyage
A chaque interface des forces assurent l’adhérence au système. La souillure doit donc
passer d’un état condensé ou aggloméré à la surface du matériel, à un état dispersé dans la
solution de rinçage ou nettoyage.
6 Automatisation d’une centrale C.I.P
SEABG
Figure 1: Mécanisme d'élimination des souillures [1]
Ainsi le mécanisme de nettoyage peut être décomposé en trois grandes étapes.
Cependant, en réalité ces différentes étapes ne se succèdent pas mais subsistent ensemble.
1.1.4. Paramétrage de la procédure de nettoyage
Les paramètres de la procédure de nettoyage sont également des facteurs importants
influant sur l’efficacité du nettoyage donc sur sa durée.
Quatre paramètres sont à considérer lors de la mise en oeuvre d’une procédure de
nettoyage. Ces paramètres sont déterminés par la nature de la souillure ainsi que la nature et
l’état du matériel sur lequel la souillure adhère. En effet, une fois la souillure et le matériel
sont soigneusement identifiés, le détergent adéquat est sélectionné, le paramétrage du
processus de nettoyage en découle. Tout fois, on est amené à les modifier selon l’apparition
d’un nouveau type de salissure ou d’une évolution technique de l’un de ces facteurs
(détergents).
Ces paramètres sont :
• Le temps durant lequel le nettoyage est effectué. Les réactions chimiques
aboutissant au nettoyage ne sont jamais instantanées. Rappelons que la quantité de nettoyage
de la souillure résiduelle est fonction du temps.
La durée de la phase de nettoyage au détergent doit être calculée avec soin pour
obtenir l’effet nettoyant optimal. On devra prendre en compte simultanément le prix du
détergent, le coût de l’électricité, du chauffage, de l’eau et de la main-d’oeuvre. Il ne suffit
pas de rincer un système de tuyauteries à l’aide d’une solution détergente. Le détergent doit
circuler suffisamment longtemps pour dissoudre les souillures. Ainsi le temps nécessaire
dépend de l’épaisseur des dépôts et de la température de la solution détergente.
7 Automatisation d’une centrale C.I.P
SEABG
• La température : Comme toute réaction chimique, une augmentation de la
température a pour conséquence une augmentation de la vitesse de réaction (loi d’Arrhenius).
L’élévation de la température a également un rôle dans l’abaissement de la tension
superficielle, la solubilisation des graisses, la diminution de leur viscosité et l’augmentation
de la turbulence (agitation désordonnée) qui atteint son maximum à l’ébullition.
• L’action mécanique : Cette action permet d’augmenter et de faciliter le contact
entre les impuretés et la solution détergente. Cette action mécanique peut être provoquée par
l’augmentation de la turbulence dans les canalisations, l’agitation des pièces à nettoyer ou la
pression exercée (action manuelle, nettoyeur haute pression). D’une manière générale,
l’action mécanique tend à augmenter la vitesse d’écoulement, réduisant ainsi l’épaisseur de la
couche limite et améliorant le transfert de détergent (nettoyant) jusqu’à la souillure mais
également tend à augmenter la contrainte de cisaillement exercée par la solution sur la
souillure.
• L’action physico-chimique (concentration) : Tout détergent possède une
concentration optimale d’utilisation, déterminée lors d’essais par le fournisseur. Une fausse
idée reçue serait de dire que plus le détergent est concentré, plus il est efficace. En effet au
dessus d’une certaine concentration, des difficultés de rinçage peuvent être observées, des
traces peuvent subsister et une toxicité tant pour l’opérateur que pour l’environnement peut
apparaître. En règle générale, les détergents sont utilisés à une concentration de 2 à 5%.
Ces paramètres peuvent être résumés de la manière suivante :
Figure 2:Cercle de Sinner [5]
La combinaison de ces quatre facteurs peut être variable. Cependant toute diminution
d’un ou plusieurs facteurs doit être compensée par une augmentation des autres facteurs afin
8 Automatisation d’une centrale C.I.P
SEABG
d’obtenir une efficacité similaire. D’une manière synthétique, nous pouvons dire que la
constante de nettoyage est fonction de :
- D’une part, la nature de l’impureté et de la nature et l’état du matériel sur lequel le
dépôt s’est effectué.
- D’autre part, la concentration en détergent, la température et l’action mécanique
exercée.
1.1.5. Détergents et nettoyage
Le plus souvent, les procédures de nettoyage font intervenir un ou plusieurs détergents
afin d’obtenir une surface propre. Les détergents sont des combinaisons de composés
chimiques qui permettent de débarrasser une surface de sa souillure.
Il arrive tout souvent d’utiliser l’eau comme agent de nettoyage, ou tout du moins
comme solvant majoritaire lors des procédés de nettoyage. L’eau, employée seule, a de
nombreux avantages, comme son très faible coût, sa non toxicité vis à vis des opérateurs et de
l’environnement. Cependant afin d’optimiser et améliorer le nettoyage, des adjuvants tels que
les détergents sont ajoutés à l’eau pour faciliter l’élimination des salissures.
Ces détergents sont ajoutés à l’eau et utilisés pour leurs propriétés ou leurs pouvoirs :
• Mouillant : abaissement de la tension superficielle, effet de pénétration.
• Solubilisant : mise en solution des résidus hydrosolubles.
• Emulsifiant : mise en émulsion des corps gras.
• Dispersant et séquestrant : mise en suspension des matières solides (poussières,
fibres, tartres).
L’utilisation de détergents dans l’industrie agro-alimentaire possède néanmoins des
désavantages. En utilisant ces produits, de nouveaux composés chimiques, source de
contamination, sont introduites dans le matériel, rappelons que la finalité du nettoyage est
l’élimination des résidus. Ces produits engendrent aussi un surcoût au niveau du procédé qui
9 Automatisation d’une centrale C.I.P
SEABG
ne doit pas être négligé. Ainsi l’ajout de détergent ne doit être fait que lorsque celui-ci est
strictement nécessaire.
1.1.5.1 Composition des détergents
La majorité des détergents sont à base de deux catégories de produits (figure 3) :
• Des sels minéraux (alcalins ou acides)
• Des constituants organiques (tensioactif, dispersant, séquestrant)
Figure 3: Composition des détergents [1]
1.1.5.2. Classification des détergents
Il existe deux grandes catégories de détergents :
1.1.5.2.1. Les détergents alcalins
Ces détergents sont les plus utilisés dans l’industrie ; 80% des nettoyages sont effectués
avec ces détergents. Ils agissent par solubilisation et désagrégation des souillures. Le milieu
alcalin permet la formation d’anions à partir de résidus de graisse. L’emploi de ce type de
détergent permet un nettoyage rapide combiné à une action désinfectante.
Deux sous-catégories de détergents alcalins coexistent, en fonction de la « source »
d’alcalinité :
10 Automatisation d’une centrale C.I.P
SEABG
• Les détergents « forts », produits extrêmement caustiques (soude caustique), réservés
au nettoyage automatique compte tenu du risque important pour le personnel.
• Les détergents « faibles », beaucoup moins caustiques et pouvant être utilisés lors du
nettoyage manuel.
Ils sont utilisés pour éliminer les résidus de graisses, huiles ou protéines.
1.1.5.2.2. Les détergents acides
Ces détergents provoquent la dissolution des dépôts minéraux et sont employés pour
nettoyer principalement l’inox. Leur utilisation est quasiment limitée aux aciers inoxydables
et nécessite des précautions particulières d’utilisation concernant les concentrations et les
températures utilisées.
La source « d’acidité » peut provenir d’un acide organique (citrique, formique…) ou
inorganique (sulfurique, phosphorique, nitrique…). Ils sont utilisés pour éliminer les résidus
d’origine minérale ou après une étape de lavage par un détergent alcalin, pour neutralisation.
1.1.5.3. Choix d’un détergent
Un détergent doit avoir les qualités requises afin d’obtenir un nettoyage efficace. La
composition chimique va influencer directement le choix du détergent. Le détergent doit
pouvoir répondre aux critères suivants :
• Nature et état des souillures : organiques ou minérales, humides ou séchées.
• Nature du matériel ou du support : aucune altération du matériel ne doit avoir lieu.
Le maintien de l’intégrité de la surface est le facteur critique (en particulier pour les
joints et appareils de mesure)
• Qualité de l’eau utilisée : une eau avec une dureté élevée nécessitera la présence de
complexant. Une eau trop acide et agressive nécessitera des inhibiteurs de corrosion.
• Mode de nettoyage : un nettoyage sans intervention manuelle permet d’utiliser des
produits plus concentrés sans danger.
11 Automatisation d’une centrale C.I.P
SEABG
• Toxicité : un détergent doit être le moins toxique possible pour le personnel mais
également le plus respectueux possible de l’environnement.
• L’efficacité du détergent : il faut éviter au maximum de multiplier les étapes de
nettoyage. Un détergent devra avoir un bon pouvoir mouillant, émulsionnant. Il devra être
stable à des températures élevées. Son rinçage et son élimination devront être aisés.
• Détectable : un bon détergent doit pouvoir être dosable à de faibles concentrations. Ce
paramètre est requis dans le cas de la validation du nettoyage.
Le choix d’un produit détergent est donc critique et conditionne le résultat après le
procédé de nettoyage (Figure 4). Il est important de déterminer la nature des résidus à
nettoyer mais également d’adapter le type de nettoyage.
Figure 4: Choix du détergent [5]
1.1.5.4. Nettoyage automatique
Le nettoyage automatique ne requiert aucune intervention humaine. Il est entièrement
automatisé. Généralement, ce type de nettoyage est appelé au nettoyage en place (NEP) ou
CIP (Clean In Place).
Ce procédé ne requiert aucun démontage préalable du matériel. Il est réalisé soit par
aspersion, soit par circulation des fluides ou solvants. L’enchaînement des opérations
s’effectue dans des conditions prédéterminées. Les fluides proviennent d’une station de
nettoyage en place, pilotée par un automate programmable. Ceci permet d’assurer la
reproductibilité du nettoyage pour différent objet.
Bien que l’intervention de l’opérateur soit réduite au minimum, il est primordial de
superviser le bon déroulement du nettoyage notamment en contrôlant les enregistrements
séquentiels. Le développement et la conception d’un système de NEP sont particulièrement
adaptés aux formes liquides ou semi liquides. Cependant, ce type de nettoyage nécessite des
12 Automatisation d’une centrale C.I.P
SEABG
installations lourdes et coûteuses et n’est pas forcément adapté pour les industries ou ateliers
multi produits.
1.1.6. Circuits de NEP
On détermine quels types de matériels peuvent être nettoyés dans le même circuit, à
partir des éléments suivants :
• Les dépôts de résidus de produits doivent être de même type, de manière à pouvoir
utiliser les mêmes détergents et désinfectants.
• Le matériau des surfaces à nettoyer doit être le même, ou tout au moins compatible
avec le même détergent ou désinfectant.
• Tous les éléments du circuit doivent pouvoir être nettoyés en même temps.
1.1.7. Matériaux compatibles et conception du système
Pour assurer un NEP efficace, le matériel devra être conçu de manière à s’adapter à un
circuit de nettoyage et être en outre facile à nettoyer. Toutes les surfaces devront être
accessibles à la solution détergente. Il ne devra y avoir aucun cul de sac que le détergent ne
peut atteindre ou à travers lequel il ne peut s’écouler (Figure 5).
Les machines et tuyauteries devront être installées de manière à pouvoir être vidangées
efficacement. Toutes les poches ou pièges à liquide d’où ne peut se vidanger l’eau résiduelle
constitueront autant de lieux de prolifération rapide des bactéries et entraîneront un risque
important d’infection du produit.
Le matériel de traitement devra utiliser des matériaux du type acier inoxydable,
plastiques et élastomères, dont la qualité interdise toute transmission d’odeur ou d’arôme au
produit. Ces matériaux devront en outre pouvoir supporter le contact avec les détergents et
désinfectants aux températures de nettoyage.
Il pourra éventuellement se produire, dans certains cas, une attaque chimique des
surfaces des tuyaux et équipements, qui contamineront le produit. Cuivre, laiton et étain sont
13 Automatisation d’une centrale C.I.P
SEABG
sensibles aux acides et aux alcalis forts. Des traces de cuivre, même infimes, dans le produit
lui donnent un goût d’oxydation (goût huileux, d’huile de baleine).
Ainsi, l’acier inoxydable constitue le matériau universel utilisé pour les surfaces en
contact avec le produit. La contamination métallique ne représente donc pas habituellement
un problème. L’acier inoxydable peut cependant être attaqué par des solutions chlorées.
La corrosion électrolytique est fréquente lorsque des éléments en cuivre ou en laiton
sont incorporés à des systèmes en acier inoxydable. Le risque de contamination est important,
dans ces conditions. Il peut également se produire une corrosion électrolytique si un système
contenant des aciers de différentes qualités est nettoyé à l’aide d’agents cationiques.
Les élastomères (par exemple les joints en caoutchouc) peuvent être attaqués par le
chlore et les agents oxydants, qui les noircissent ou les fissurent, libérant ainsi dans le produit
des particules de caoutchouc. De ce fait, différents types de plastiques utilisés dans les
matériels de traitement peuvent entraîner un risque de contamination. Certains de leurs
constituants peuvent être dissous par les solutions détergentes.
Figure 5: Exemple de cul de sac [5]
1.2. Description de l’installation de nettoyage NEP
Comme chez toutes les entreprises de production d’agroalimentaire et de boissons, les
aspects sanitaires dans la Société des Emballages et Boissons Gazeuses à Bouargoub
(SEABG), ont une extrême importance puisque l’entreprise doit respecter les normes
d'hygiène pour éviter la dégradation et de contamination des produits pendant le
14 Automatisation d’une centrale C.I.P
SEABG
fonctionnement des machines. Le nettoyage doit être effectué rapidement et minutieusement.
Les meilleures conditions de nettoyage se rencontrent avec le système de nettoyage en place.
1.2.1. Les cinq étapes du système NEP
A fin de réaliser un nettoyage convenable aux raisons sanitaires déjà développées, on
procède comme suit :
1- Rinçage à l’eau traitée pour éliminer les résidus.
2- Passage d’une solution alcalines (soude caustique): les détergents alcalins dissolvent
les graisses et les protéines, et nettoient les dépôts qui sont difficiles à enlever.
3- Rinçage intermédiaire à l'eau traitée.
4- Passage d’une solution acide (ou eau chaude) qui sert à neutraliser les restes
caustiques sur les surfaces de contacts. Les détergents acides enlèvent les dépôts minéraux
dans les circuits.
5- Rinçage final à l'eau froide traitée qui enlève les résidus acides
1.2.2. Les objets à nettoyer
L’installation NEP à concevoir au sein de la société SEABG permet actuellement de
faire un nettoyage en place des objets suivant :
Une station comportant cinq tanks (réservoir) de bière décrit comme suit :
• Deux tanks de volume 38 000 l équipés de sondes de niveau et soumises sous
pressions (CO2) de 1.5 bar lors du transfert de la bière vers les deux soutireuses.
• Trois tanks de volume 50 000 l équipés de sondes de niveau et par une
procédure de réglage de pression.
• Une grille de vanne double siège qui contrôle le parcours de la bière et des
produits de nettoyage (eau, détergent, désinfectant).
Les deux lignes de production SASIB1 et SASIB2.
Les deux stations d’alimentation de la bière.
15 Automatisation d’une centrale C.I.P
SEABG
1.2.3. L’installation CIP actuelle
Actuellement l’unité de nettoyage de CIP ne comporte que deux tanks :
- Le premier est utilisé pour la préparation de la solution de soude
caustique.
- Le deuxième est utilisé pour le dosage du volume d’eau froide de
rinçage puis pour la préparation de la solution acide.
Cette unité dispose d’une pompe qui assure le transfert d’eau ou du détergent vers
l’objet à nettoyer et d’un échangeur tubulaire qui gère la température.
Figure 6: Système simple (circuit ouvert) [6]
Vue qu’actuellement, lors d’un cycle de nettoyage, la circulation du détergent ou le
rinçage avec l’eau se fait en circuit ouvert c'est-à-dire l’eau ou la solution du détergent est
rejetée après une seule utilisation (Figure 6) cela implique :
gaspillage d’eau et des détergents: pour le nettoyage d’un tank (TBF) on utilise
actuellement, en se basant sur le plan de nettoyage hebdomadaire des TBF,
30000 l d’eau.
augmentation du coût de nettoyage par suite le coût de production.
influences négatifs touchant l’environnement : pollution par le rejet de produit
toxique tel que la soude caustique…
A cela s’ajoute que la préparation des cuves se fait d’une manière manuelle, l’ouvrier
responsable ne dispose que d’un thermomètre placé dans le cuve isolée et d’un manomètre
pour observer la pression. Puisque toutes les vannes sont commandées manuellement, alors
l’efficacité de l’opération de nettoyage dépend intégralement de l’expérience de l’ouvrier.
16 Automatisation d’une centrale C.I.P
SEABG
En conséquence le temps du cycle de nettoyage d’un objet est élevé du fait que tout se
fait d’une manière manuelle. Ainsi le respect des exigences de nettoyage qu’on a développé
(la concentration et la température de détergent, le temps de contact …) ne sera pas garanti. A
cela s’ajoute le danger auquel est disposé l’ouvrier vu qu’il sera en contact direct avec des
produits toxiques à haute température (soude, acide…).
D’où la nécessité de l’installation d’une unité de nettoyage en place contrôlée
automatiquement dont les séquences de nettoyage sont programmées pour un temps optimal
et un nettoyage efficace.
1.2.4. L’installation CIP prévue
Afin de remédier aux inconvenions de l’installation CIP actuelle, l’entreprise envisage
les modifications suivantes
La nouvelle unité CIP comportera quatre tanks de volume 5 000 l au lieu de
deux :
• Une cuve pour la solution soude caustique.
• Un cuve pour la solution d’acide.
• Un cuve d’eau pour le rinçage.
• Un cuve d’eau chaude.
La solution de nettoyage est recyclée une fois utilisée cela implique
l’implémentation d’une canalisation qui boucle le circuit du détergent. La
préparation de la cuve deviendra automatique et l’opérateur pourra choisir les
séquences de nettoyage programmées convenables pour l’objet à nettoyer avec
un temps optimal (Figure 7)
17 Automatisation d’une centrale C.I.P
SEABG
Figure 7: Système à recyclage de détergent [6]
Comme pour tous système, le système NEP prévue présente des avantages et des
inconvénients :
Avantages :
Réduction du temps de nettoyage.
Amélioration de l’efficacité de nettoyage (les systèmes automatisés nettoient et
désinfectent plus efficacement et uniformément que le nettoyage manuel).
Conservation de la solution de nettoyage.
Amélioration du temps d'utilisation de l'équipement.
Amélioration de la sécurité alimentaire
Optimisation de l'utilisation de l'eau et du détergent.
Accès aux aires difficiles à nettoyer.
Inconvénients :
Installation : l'optimisation des programmes de nettoyage doit être effectuée
par des personnes qualifiées (coûteuse).
Maintenance : la pression et le débit des produits chimiques de nettoyage à
travers le système doivent être mesurés également il est nécessaire de vérifier
régulièrement que ces éléments sont appliqués uniformément et sans
interruption.
18 Automatisation d’une centrale C.I.P
SEABG
1.3. Conception de l’installation de N.E.P
Une étude préliminaire détaillée du fonctionnement de l’installation ainsi que la
détermination de ces modules d’entrées et sorties et de ses exigences en matière de sécurité,
nous permet de bien comprendre les mécanismes du processus. Ceci nous facilitera la tâche de
programmation de l’automate et limitera les surprises lors de la réalisation des tests sur le
processus industriel réel.
Dans cette partie, nous commençons par présenter l’installation de la centrale de
nettoyage en place proposée par la société SEABG, ensuite nous procédons à la conception
d’une solution automatisée tout en décrivant les différentes zones fonctionnelles de
l’installation et en déterminant les exigences en matière de sécurité.
1.3.1. Présentation de l’installation
La Figure 8 représente le schéma de l’installation de la centrale de nettoyage en place à
étudier. Cette installation comprend :
Une cuve pour la préparation de la solution soude caustique
Un réservoir de soude (écaillée)
Un échangeur thermique tubulaire
Une table de pontage relié à l’unité de traitement d’eau
Des vannes monostables et des accessoires nécessaires pour le bon
fonctionnement du processus.
Une pompe de pression et une pompe doseuse.
Des instruments de mesure (manomètre, thermocouple, conductimètre
thermomètre)
Des capteurs tout ou rien (sondes de niveaux, détecteur de proximité,
détecteur de débit)
19 Automatisation d’une centrale C.I.P
SEABG
Figure 8: Schéma de la centrale CIP
20 Automatisation d’une centrale C.I.P
SEABG
1.3.2. Conception d'une solution d'automatisation
Puisque la procédure de nettoyage en place fait appelle à des produits toxiques (soude
caustique, acide …) dangereux pour l’homme et que c’est une opération coûteuse, son
automatisation permet de répondre à deux types de critères :
- Critère « économique » : augmenter la productivité, améliorer la qualité et diminuer
les coût de production.
- Critère « humains » : améliorer les conditions de travail, accroître la sécurité,
supprimer les tâches pénibles et répétitives.
Pour l’automatisation de notre système nous avons adopté l’approche de la Figure 9.
Figure 9: Etape de conception d'une solution automatisé
1.3.2.1. Subdivision du processus
Un processus d’automatisation est constitué de différentes tâches. Il est possible donc de
définir des zones cohérentes au sein du processus et de subdiviser ces dernières en tâches
partielles plus petites. Dans cette partie nous allons structurer notre processus en zones
fonctionnelles et en tâche élémentaires.
Comme chaque zone est à son tour subdivisée en tâches plus petites, les tâches
nécessaires pour commander la partie correspondante du processus ne sont pas très
complexes.
21 Automatisation d’une centrale C.I.P
SEABG
La centrale de nettoyage en place peut être subdivisée en cinq zones (Tableau I)
Réservoir de soude concentré
Alimentation d’eau
Cuve soude
Echangeur
Circuit détergent
Tableau I: Subdivision du processus
Zone Equipement associé
fonctionnelle
Réservoir de soude - pompe doseuse pour l’alimentation en soude (P1) équipé
concentré d’une crépine d’aspiration.
- crépine DN65 pour la protection de la pompe doseuse (C1)
- sonde de niveau (LS3)
Alimentation d’eau - vanne papillon automatique d’alimentation d’eau (V8)
- détecteur de position (DP1)
- vanne papillon automatique pour le rinçage de la cuve (V10)
- vanne papillon automatique pour l’alimentation d’eau de
rinçage (V9)
Cuve soude - cuve verticale isolée équipée d’une boule de lavage avec un
trou d’homme supérieur à 400 mm
- sonde de niveau haut (LS1)
- sonde de niveau bas (LS2)
- thermomètre (TI1)
- vanne papillon manuelle échappement cuve DN65 (V11)
- vanne papillon automatique pour la vidange de la cuve (V1)
- vanne papillon automatique d’admission détergent (V7)
Echangeur - Vanne manuelle papillon DN80 (V12)
- Filtre Y DN80 (F1)
- Vanne réducteur de pression DN65 (V13)
22 Automatisation d’une centrale C.I.P
SEABG
- Vanne modulante pour la régulation de pression DN65
(VM1)
- Indicateur transmetteur de température de type PT100 (TIC1)
- Echangeur thermique tubulaire
- Système condensât DN40
Circuit du détergent - pompe de pression CIP (P2)
- sonde de niveau (LS4)
- clapet anti-retour pour la protection de la pompe P2 (C2)
- manomètre à membrane sanitaire (PI)
- vanne modulante à la sortie d’échangeur pour le contrôle de
pression (VM2)
- deux vannes papillons automatiques DN65 à action inverse
pour la détermination du chemin du détergent (V3 et V4)
- vanne papillon automatique DN65 retour détergent (V5)
- vanne papillon automatique DN65 pour l’échappement
détergent (V6)
- clapet anti-retour retour CIP (C3)
- indicateur de température (TI2)
- transmetteur de conductivité (TC1)
- indicateur de débit de type sanitaire (FS1)
1.3.2.2. Description des différentes zones fonctionnelles
La description de chaque zone et de chaque tâche du processus de NEP permet de
définir non seulement le fonctionnement de chaque zone, mais également les différents
éléments de commande associés, à savoir :
• les entrées et les sorties logiques pour chaque tâche
• les verrouillages et les relations de dépendance entre les différentes tâches
La centrale de nettoyage en place fait appel à des pompes, des vannes automatiques et
des vannes modulantes. Il faut décrire chacune de ces éléments précisément afin d'identifier
leurs caractéristiques de fonctionnement et le type des verrouillages nécessaires pendant
23 Automatisation d’une centrale C.I.P
SEABG
l'exploitation. Les tableaux suivants fournissent des modèles de description de l'équipement
utilisé.
Tableau II: Moteur de la pompe doseuse
Réservoir de soude concentré : moteur de la pompe doseuse P1
1. la pompe doseuse [6] amène la soude caustique, sous forme liquide, du réservoir vers
la cuve où elle est mélangée avec de l’eau. Les caractéristiques de cette pompe sont :
o débit : 50l / h
o pression : 10 bar
2. Le démarrage et l’arrêt de la pompe sont commandés :
- par l’automate lors du fonctionnement en mode automatique selon le grafcet à définir
ultérieurement ; pendant le cycle « préparation tank soude caustique ».
- Par le pupitre de commande en mode manuel.
3. Les conditions de validation sont les suivantes:
- Le réservoir du soude caustique n’est pas vide (LS3)
- lors de la préparation du tank de la soude, la conductivité qui circule en circuit fermé
est inférieure à 300 ms/cm3
- l’arrêt d’urgence n’est pas activé.
- une alarme de niveau arrêt d’urgence n’est pas activée.
4. les conditions d’arrêt sont les suivantes :
- la sonde de niveau bas indique que le réservoir est vide pendant le fonctionnement
- la solution de soude qui circule atteint la conductivité désirée (soude_prête)
- le système signale une alarme qui nécessite l’arrêt de toutes les pompes.
24 Automatisation d’une centrale C.I.P
SEABG
Tableau III: Vannes d'alimentation d'eau
Alimentation d’eau : vannes d’alimentation d’eau
1. Les vannes d'alimentation V8 et V10 permettent ou empêchent l'arrivée de l’eau au
cuve_soude. Ces vannes comportent un commutateur magnétique avec rappel à ressort ;
o La vanne est ouverte lorsque le commutateur magnétique est activé.
o La vanne est fermée lorsque le commutateur magnétique est désactivé.
2. Les vannes d’alimentation d’eau sont commandées :
- par l’automate lors du fonctionnement en mode automatique selon le grafcet à définir
ultérieurement ; pendant le cycle « préparation tank soude caustique » pour la vanne
V8 et pendant le cycle « rinçage cuve soude caustique » pour la vanne V10.
- Par le pupitre de commande en mode manuel.
3. Les conditions de validation sont les suivantes :
• pour la vanne V8 :
- la cuve n’est pas pleine.
- Le capteur de proximité (DP1) signale la connexion de la cuve à la source d’eau
(table de pontage)
- La vanne de vidange V1 est fermée
- L’arrêt d’urgence n’est pas activé
• pour la vanne V10
- la vanne de vidange V1 ou la vanne d’échappement V11 est ouverte
- la sonde de niveau bas (LS2) signale cuve vide
- l’arrêt d’urgence n’est pas activé
4. Les conditions d’arrêt sont les suivantes :
• pour la vanne V8
- la sonde de niveau LS1 signale cuve pleine
25 Automatisation d’une centrale C.I.P
SEABG
- le capteur de proximité (DP1) signale la déconnexion au réseau d’alimentation d’eau
au niveau de la table de pontage.
• pour la vanne V10
- le temps de rinçage fixé par l’opérateur est écoulé.
Tableau IV: Les vannes du circuit du détergent
Cuve soude et circuit du détergent : les vannes automatiques
1-
• L’ouverture des vannes V1, VM2, V4 et V7 successivement, assure la circulation de
l’eau (lors du cycle « rinçage cuve_soude ») ou de la solution soude caustique (lors
du cycle « préparation soude_caustique) dans un circuit fermé.
• L’ouverture des vannes V1, VM2, V3, V5 et V7 successivement, assure la circulation
de la solution basique (détergent) de la cuve vers l’objet à nettoyer.
• L’ouverture des vannes V1, VM2, V4 et V6 successivement, assure la circulation de
l’eau de rinçage de la cuve soude, à travers le circuit fermé de l’installation vers un
égout.
• L’ouverture des vannes V9, VM2, V3, V5 et V6 successivement, assure la circulation
de l’eau de rinçage vers l’objet à nettoyer puis sa sortie par l’égout via la vanne V6.
Les vannes V1, V3, V4, V5, V6, V7 et V9 comportent un commutateur magnétique avec
rappel à ressort ;
o La vanne est ouverte lorsque le commutateur magnétique est activé.
o La vanne est fermée lorsque le commutateur magnétique est désactivé
La vanne VM2 subit un réglage mécanique permettant le contrôle du débit à sa sortie. Un
signale 4-20 mA permet l’ouverture ou la fermeture de la vanne modulante.
26 Automatisation d’une centrale C.I.P
SEABG
2- Le démarrage et l’arrêt de ces sont commandés :
- par l’automate lors du fonctionnement en mode automatique selon le grafcet à définir
ultérieurement.
- Par le pupitre de commande en mode manuelle.
3- Les conditions de validation sont les suivantes :
• pour la vanne V6
- la conductivité de soude est inférieur à la consigne lors de la circulation de la solution
soude entre le cuve_soude et l’objet à nettoyer.
• Pour la vanne V1
- La sonde de niveau (LS2) ne signale pas « cuve vide »
- L’arrêt d’urgence n’est pas activé
• pour la vanne V3
- la vanne V4 est fermée
- l’objet est prêt pour un cycle CIP
- l’arrêt d’urgence n’est pas activé
• pour la vanne V4
- les vannes V3 et V5 sont fermées.
- l’arrêt d’urgence n’est pas activé
• pour les vannes V5, VM2, V7 et V9
- l’arrêt d’urgence n’est pas activé
4- la condition d’arrêt de ces vannes est la suivante :
- l’eau ou la soude circule dans un circuit fermé ou ouvert alors que le détecteur de débit
FS1 ou la sonde LS4 ne signale rien durant 6 secondes .
27 Automatisation d’une centrale C.I.P
SEABG
Tableau V: Pompe CIP_Pression
Circuit du détergent : moteur de la pompe CIP_pression (P2)
1- La pompe CIP_pression permet la circulation de l’eau ou de la soude dans un circuit
fermé ou ouvert en améliorant la force de contact.
- capacité 35 m3/h
- pression 4 bar
- moteur 11 kW
- variateur de fréquence
2- Le démarrage et l’arrêt de ces sont commandés :
- par l’automate lors du fonctionnement en mode automatique selon le Grafcet à
définir ultérieurement.
- Par le pupitre de commande en mode manuelle
3- les conditions de validation sont les suivantes:
• l’arrêt d’urgence n’est pas activé
• la sonde de niveau LS4 signale la présence d’un produit pendant 6s
• le détecteur de débit FS1 signale que le débit n’est pas nul 20s, au maximum, après la
mise en marche de la pompe.
• La vanne V1 ou V9 est ouverte.
4- les conditions d’arrêt sont les suivantes :
• la sonde de niveau LS4 ne signale rien durant 6s pendant le fonctionnement de la
pompe
• Le capteur de débit FS1 ne signale pas que le régime nominal est atteint au plus tard
20 secondes après le déclenchement du moteur de la pompe.
28 Automatisation d’une centrale C.I.P
SEABG
Tableau VI: Vanne modulante VM1
Echangeur : vanne modulante VM1
la vanne modulante VM1 permet le contrôle de la pression du vapeur venant de la
chaudière. L’automate contrôle le pourcentage d’ouverture de la vanne modulante
VM1 par un signale électrique qui varie entre 4 et 20 mA, qui sera convertie en
pression proportionnel grâce à un transducteur courant-pression.
- Les caractéristiques du vapeur sont :
• pression d’arrivé de la chaudière : 8 bar
• débit : 620 Kg/h
• retour condensât vers la chaudière : 620 Kg/h
le pourcentage d’ouverture de la vanne sera contrôlé par un régulateur PID dont les
paramètres seront précisés ultérieurement.
Si la température est inférieure à la consigne alors la vanne sera ouverte.
le transmetteur de température TIC1, placé à la sortie de l’échangeur signale la valeur
de température de la solution ; cette valeur sera utilisée à l’entrée du régulateur et
comparée avec la consigne.
4- les caractéristiques de l’échangeur de température tubulaire horizontale [4],[5] seront
développées dans le chapitre 2.
1.3.3. Définition des exigences en matière de sécurité
La centrale CIP à concevoir fait appel à la logique suivante pour son circuit de sécurité
(Figure 10) :
• Un commutateur d'arrêt d'urgence arrête les appareils suivants
indépendamment via l'automate programmable :
o Pompe d'alimentation CIP_Pression (P2)
o Pompe doseuse P2
o Les Vannes d’alimentation d’eau
29 Automatisation d’une centrale C.I.P
SEABG
Figure 10: Pupitre de commande
Conclusion
Ce chapitre nous a permis de définir le terme « nettoyage en place » et d’apporter les
éclaircissements nécessaires aux paramètres assurant le bon déroulement de la procédure de
nettoyage à savoir la concentration, la température et le temps de contact du détergent. En
plus, il nous a permis de décrire l’installation de nettoyage en place tout en définissant les
exigences en matière de sécurité.
Cette étude nous a été bénéfique afin de pouvoir identifier les différentes zones
fonctionnelles et déterminer les besoins matériels.
Par ailleurs, nous estimons qu’à ce stade, il est difficile d’entamer la programmation de
notre système sans faire une représentation graphique du fonctionnement qui tient compte de
la gestion des modes de marche et d’arrêt. Cette étude fera l’objet du deuxième chapitre.
30 Automatisation d’une centrale C.I.P
SEABG
CHAPITRE II :
Conception et spécification de
l’automatisation du processus CIP
31 Automatisation d’une centrale C.I.P
SEABG
Introduction :
Une bonne spécification du fonctionnement d’un système tout en prenant compte de
toutes ses contraintes à savoir le démarrage, les arrêts (les modes de marches et d’arrêt),
l’enchaînement des actions (ouverture / fermeture vanne, régulation de température…) ainsi
que ses relations avec son environnement (l’opérateur, les capteurs, les actionneurs….) est
indispensable pour l’implémentation de sa commande.
Pour cela, nous proposons d’utiliser le GRAFCET, afin de décrire correctement la
commande de notre système.
Par ailleurs, lors de l’étude d’un système automatisé, le concepteur a besoin d’une
approche guidée systématique, du genre « check list » (liste de vérification) pour tout prévoir
dès l’étude et envisager les conséquences, tant pour la partie opérative que pour la partie
commande du système à réaliser d’où l’utilité du guide graphique Gemma.
Pour ces raisons, ce chapitre est consacré à la réalisation d’une représentation Grafcet
puis GEMMA de la commande du système.
2.1. Conception de l’automatisation
Une représentation Grafcet exprimant l’évolution des différentes étapes de la CIP
(préparation du tank soude caustique, rinçage, injection de la solution soude caustique…) en
interaction avec son environnement (ordres de marches/arrêts, compte rendu de la partie
opérative) sera présentée dans ce qui suit en se basant sur :
- Les instructions du cahier des charges concernant le fonctionnement du processus de
nettoyage en place à accomplir.
- La conception physique de l’installation présentée dans le chapitre précédant.
- Les propriétés du modèle Grafcet.
32 Automatisation d’une centrale C.I.P
SEABG
2.1.1. Grafcet fonctionnel
2.1.1.1. Identification des entrées-sorties du Grafcet 1
Lors de l'établissement du Grafcet de spécification, on utilise des noms explicites pour
les entrées du système modélisé ainsi que pour les sorties (les actions ou ordres émis vers la
partie opérative mais aussi les visualisations vers l'opérateur). Lors du passage au Grafcet de
réalisation, on utilise plutôt des noms logiques pour les entrées/sorties du système.
Par convention, les entrées seront rangées dans un vecteur (le vecteur d'entrée) et
nommées Ei où i est le rang de l'entrée considérée dans le vecteur d'entrée. De même les
sorties seront rangées dans un vecteur (le vecteur de sortie) et nommées Si où i est le rang de
la sortie considéré dans le vecteur de sortie.
Par la suite on utilisera ces notations Ei et Si afin de désigner les entrées et les sorties de
la partie commande pour des commodités d'écriture. La « Figure11» montre un exemple de
nommage symbolique des entrées/sorties pour le Grafcet fonctionnel principale de la
procédure de nettoyage en place à automatiser (Grafcet 1).
Figure 11: Nommage symbolique des entrées/sorties
33 Automatisation d’une centrale C.I.P
SEABG
La nomenclature de la Grafcet fonctionnel principal (Grafcet1) sera représentée dans le
tableau suivant :
Tableau VII: Les entrées sortie du Grafcet principale
Variable Source Commentaire
OP27_demande_cycle Pupitre de commande Demande de commencer un cycle
Ord_cycle_rinç_cuve Pupitre de commande Demande de commencer un cycle de
rinçage de la cuve soude.
Ord_prép_soude Pupitre de commande Demande de commencer un cycle de
préparation de la cuve soude.
Ord_cycle_rinç_souti Pupitre de commande Demande de commencer un cycle de
rinçage de la soutireuse.
Ord_cycle_CIP Pupitre de commande Demande de commencer un cycle
CIP complet de la soutireuse.
Eau_disp Unité de traitement d’eau Eau disponible dans l’unité de
traitement d’eau.
Vapeur_disp Chaudière Vapeur disponible dans la chaudière
Soutireuse_prête Soutireuse Soutireuse prête pour un cycle CIP
Soude_prête Bit interne de l’automate La soude dans la cuve correspondant
est prête pour l’utilisation.
Fin_rinç_cuve_soude Bit interne de l’automate Achèvement du cycle « rinçage cuve
soude »
Fin_prép_cuve_soude Bit interne de l’automate Achèvement du cycle « préparation
cuve soude »
Fin_rinç_souti Bit interne de l’automate Achèvement du cycle « rinçage
soutireuse »
Fin_cycle_CIP Bit interne de l’automate Achèvement du cycle « CIP complet
pour la soutireuse »
Demande_eau Bit interne de l’automate Demande d’eau par l’automate à
l’unité de traitement d’eau.
Demande_vapeur Bit interne de l’automate Demande de vapeur par l’automate à
la chaudière.
Demande_auto_souti Bit interne de l’automate Demande si la soutireuse est prête
pour un cycle CIP
Rinç_cuve_soude Bit interne de l’automate Rinçage de la cuve _soude en cours
Préparation_cuve_soude Bit interne de l’automate Préparation de la cuve _soude en
cours
Rinç_souti Bit interne de l’automate Rinçage de la soutireuse en cours
Cycle_CIP Bit interne de l’automate Cycle CIP complet de la soutireuse
en cours
2.1.1.2. Grafcets
2.1.1.2.1. Grafcet principal
D’après le cahier de charge, le Grafcet principale à construire doit remplir les conditions
suivantes :
34 Automatisation d’une centrale C.I.P
SEABG
- donner la possibilité d’effectuer les cycles suivants :
• cycle de préparation du tank soude caustique
• cycle de rinçage de la cuve contenant la solution soude caustique
• cycle de rinçage de la soutireuse (objet à nettoyer)
• cycle NEP (premier rinçage, une injection de la solution basique, un second
rinçage)
- potentialité de détecter la disponibilité des énergies intervenant lors de
l’exécution des tâches à accomplir à savoir la chaudière et l’unité d’alimentation de
l’eau de rinçage :
• demande eau / eau disponible
• demande vapeur / vapeur disponible
- possibilité de communiquer avec l’objet à nettoyer (exemple : la soutireuse,
tank vide…)
• demande autorisation soutireuse
• soutireuse prête
• soutireuse en mode automatique
- Ordonnancement des demandes selon leurs priorités : à titre d’exemple la
demande_eau doit être commandée en premier lieu puisqu’elle est primordiale pour
tous les cycles proposés précédemment alors que la demande_soutireuse est effectuée
en dernier lieu car elle n’est nécessaire que pour les cycles rinçage_soutireuse et
cycle_CIP
- communication avec le pupitre de contrôle-commande (OP27)
• Choix du cycle
• Choix du mode (mode automatique ou manuelle)
Le Grafcet suivant représente le Grafcet fonctionnel du cahier de charge.
35 Automatisation d’une centrale C.I.P
SEABG
0 Départ
OP27_demande_cycle
1 Demande_eau
Eau_disp . Ord_cycle_rinc_cuve Eau_disp . Ord_cycle_rinc_cuve
1 3 Demande_vapeur
M2 « Rincage_cuve_soude »
0 Vapeur_disp
4 Demande_choix_cycle
Fin_rinc_cuve_soude
Ord_prép_soude Ord_prép_soude
4 6 Demande_autor_sout
M5 « Préparation_cuve_soude»
0 Soutireuse_prête
7 Demande_choix_cycle
Fin_prép_cuve_soude.
Soude_prête
Ord_cycle_rinçage_souti Ord_cycle_CIP . Soude_prête
7 7
M8 « Rinçage_souti » M9 « Cycle_cip »
0 0
Fin _rinçage_souti Fin_cycle_cip
Grafcet 1: Grafcet fonctionnel du système de nettoyage en place (cahier de charge)
36 Automatisation d’une centrale C.I.P
SEABG
2.1.1.2.2. Macro-étape cycle_CIP
La Macro-étape M9 (Grafcet 2) contient les différentes étapes du cycle du nettoyage en
place auquel on s’est limité, à savoir :
- un premier rinçage
- un nettoyage avec la soude caustique (solution basique)
- un deuxième rinçage
E90
1
91 Début_cycle_CIP
début_1errinçage_souti
M8 « Rinçage_souti »
Fin_1errinçage_souti . Début_injec_soude
M7 « Injec_soude_caustique»
Fin_inj_soude . Début_2errinçage_souti
M8 « Rinçage_souti »
Fin_2errinçage_souti
95 Fin_2errinçage_souti
S95
Grafcet 2: Macro-étape M9 (cycle_CIP)
* Les actions de chaque une des étapes du nettoyage seront détaillées par la suite dans les
Macro-étapes correspondantes.
37 Automatisation d’une centrale C.I.P
SEABG
2.1.2. Grafcet opérationnel
2.1.2.1. Identification des entrées / sorties
Les entrées
Tableau VIII: Identification des entrées
Nom commentaire
LS1 Sonde de niveau haut cuve_soude
LS2 Sonde de niveau bas cuve_soude
LS3 Sonde de niveau bas réservoir_soude
LS4 Sonde de niveau haut placé dans le circuit du NEP
DP1 Détecteur de proximité placé dans la table de pontage d’eau.
FS1 Détecteur de débit.
Temp_défav La température de la soude est inférieure à la consigne de
l’opérateur.
Temp_fav La température de la soude est conforme avec la consigne de
l’opérateur.
Conc_défav La conductivité de la soude est inférieure à la consigne de
l’opérateur.
Conc_fav La conductivité de la soude est conforme avec la consigne
de l’opérateur.
Début_cycle_rinçage_cuve Départ cycle de rinçage de la cuve de soude.
Début_cycle_prép_cuve_soude Départ cycle de préparation de la cuve de soude caustique.
Ord_cycle_rinçage_souti Départ cycle de rinçage soutireuse (ou tank vide)
ér
Ord_1 rinçage_souti Départ 1ér rinçage du cycle CIP.
Ord_2éme rinçage_souti Départ 2éme rinçage du cycle CIP.
Début_injec_soude Départ nettoyage avec la soude.
Les sorties
Tableau IX: Identification des sorties
Nom commentaire
V1+ Ouverture de la vanne V1
V1- Fermeture de la vanne V1
VM2+ Ouverture total de la vanne modulante VM2
VM2- Fermeture total de la vanne modulante VM2
V3+ Ouverture de la vanne V3
38 Automatisation d’une centrale C.I.P
SEABG
V3- Fermeture de la vanne V3
V4+ Ouverture de la vanne V4
V4- Fermeture de la vanne V4
V5+ Ouverture de la vanne V5
V5- Fermeture de la vanne V5
V6+ Ouverture de la vanne V6
-
V6 Fermeture de la vanne V6
V7+ Ouverture de la vanne V7
V7- Fermeture de la vanne V7
V8+ Ouverture de la vanne V8
V8- Fermeture de la vanne V8
V9+ Ouverture de la vanne V9
V9- Fermeture de la vanne V9
V10+ Ouverture de la vanne V10
V10- Fermeture de la vanne V10
KM2+ Fermeture du contact du moteur associé à la pompe P2.
-
KM2 Ouverture du contact du moteur associé à la pompe P2.
Soude_prête Le tank soude caustique est prêt (température et
concentration de la soude sont adéquat avec les consignes)
Etat_rinçage_cuve Rinçage cuve soude en cours
Fin_rinçage_cuve_soude Fin rinçage cuve soude
Etat_prép_cuve_soude Préparation cuve soude en cours
Fin_ prép_cuve_soude Fin préparation cuve soude
Etat_cycle_rinç Cycle rinçage de la soutireuse en cours
Fin_cycle_rinç Fin cycle rinçage de la soutireuse
Etat_1érrinç Premier rinçage de la soutireuse en cours
Fin_1érrinç Achèvement du premier rinçage
Etat_2émerinç Second rinçage en cours
Fin_2émerinç Achèvement du second rinçage
Etat_cycle_CIP Cycle CIP, complet, en cours
Fin_cycle_CIP Fin cycle CIP
Etat_injc_soude Nettoyage de la soutireuse en cours
Fin_inje_soude Achèvement du nettoyage de la soutireuse avec la soude.
39 Automatisation d’une centrale C.I.P
SEABG
2.1.2.2. Macro-étape rinçage_cuve_soude :
La Macro-étape M2 (Grafcet 3) comprend les différentes actions nécessaires pour la
réalisation de la tâche « rinçage_cuve_soude ». Pour accomplir cette tâche il faut passer par
les étapes suivantes :
- ouverture de la vanne d’alimentation d’eau de rinçage pour la cuve soude.
- circulation de l’eau dans un circuit ouvert à fin d’évacuer les impuretés
existantes dans la cuve.
- circulation de l’eau dans un circuit fermé pour éliminer les impuretés que
renferme le ce circuit.
- Fermeture de la vanne d’alimentation d’eau après écoulement du temps de
rinçage définie par l’opérateur.
- Evacuation de l’eau restant dans le circuit.
2.1.2.3. Macro-étape préparation_cuve_soude :
La Macro-étape M5 (Grafcet 4) comprend les actions nécessaires pour préparer une
solution de soude caustique dans une cuve de volume (5000 l) répondant aux exigences de la
procédure de nettoyage en place de l’objet en question (température et concentration de la
soude).
Les différentes étapes sont :
- Remplir la cuve en eau (volume paramètre)
- Niveau haut couvert
- Activation pompe de mélange
- Ravitaillement de soude (quantité paramètre)
- Mesure de concentration (conductivité de paramètre ok)
- Chauffage de la solution eau / soude (température paramètre ok)
- Poussée de la solution eau / soude après chauffage
- Cuve prête pour la NEP.
En effet la Macro-étape M5 renferme elle-même deux autre Macro-étape (M57 et M58)
qui ont pour rôle la régulation de température et la régulation de la concentration. Les actions
de ces dernières seront détaillées dans ce qui suit.
40 Automatisation d’une centrale C.I.P
SEABG
E20
Début_cycle_rinçage_cuve
21 V1+ V10+ état_rinçage_cuve
LS4
22 KM2+ VM2+ V4+ V6+
FS1 . T 75 / 3M / XE22
23 V6- V7+
T 76 / 7M / XE23 *
24 V1- V10- V6+ V7-
LS4
25 KM2-
T 77 / 5S / XE25
26 VM2- V4-
FS1
27 V6- état_rinçage_cuve fin_rinçage_cuve_soude
S28
Grafcet 3: Macro-étape M2 (rinçage_cuve_soude)
* Le temps alloué pour le rinçage de la cuve (temporisateur T 76) est déterminé par l’opérateur via le
pupitre de commande (OP27)
41 Automatisation d’une centrale C.I.P
SEABG
E50
Début_cycle_prép_cuve_soude
51 état_prép_cuve_soude
DP1 . LS1
52 V8+
LS1 . LS2
53 V8-
DP1
54 V1+
LS4
55 KM2+ VM2+ V4+ V7+
FS1 . T 20 /7S / XE55
56
Temp_défav . Conc_défav Temp_défav Conc_défav
56 « Régul_température » 56 « Régul_concentration »
* *
M57 M58
61 59 60 62
Conc_fav Conc_fav
Temp_fav
Temp_fav
61 62
1
Grafcet 4: Macro-étape M5 (préparation_cuve _soude) 1/2
42 Automatisation d’une centrale C.I.P
SEABG
63 V1-
LS4
64 KM2-
T 29 / 5S / XE60
65 VM2- V4-
T 76 / 20S / XE61
66 V6+ V7-
FS1
67 V6+ Soude_prête état_prép_cuve_soude Fin_prép_cuve_soude
S68
Grafcet 5: Macro-étape M5 (préparation_cuve _soude) 2/2
* Les Macro-étapes M57 et M58 représentent simultanément la régulation de température et
la régulation de concentration et seront détaillée ultérieurement.
43 Automatisation d’une centrale C.I.P
SEABG
2.1.2.4. Macro-étape rinçage_soutireuse :
La macro-étape M8 (Grafcet 5) ou encore « rinçage_soutireuse » décrit les différentes actions
nécessaires pour la réalisation d’un rinçage correcte pour la soutireuse. Ces actions sont :
- ouverture de la source d’eau de rinçage
- circulation de l’eau dans la soutireuse en circuit ouvert.
- Fermeture de source d’eau après écoulement du temps de rinçage prédéfinis par
l’opérateur.
- Evacuation de l’eau restant dans le circuit
- Céder la main au cycle suivant.
2.1.2.5. Macro-étape injection_soude_caustique :
La Macro-étape M8 (Grafcet 6) ou encore « injection_soude_caustique » présente les étapes
nécessaires pour l’accomplissement du nettoyage à la soude dans la soutireuse (objet a
nettoyer). Ces étapes sont :
- Activation de la pompe d’injection de la soude.
- Circulation de cette solution en circuit fermé entre le réservoir (cuve soude) et l’objet
à nettoyer.
- Arrêt de la pompe d’injection de la soude après l’écoulement du temps d’injection
prédéfinis par l’opérateur.
- Evacuation de la solution restante dans le circuit.
- Céder la main au cycle suivant.
44 Automatisation d’une centrale C.I.P
SEABG
E80
Ord_cycle_rinçage_souti Ord_1érrinçage_souti Ord_1érrinçage_souti
81 Etat_cycle_rinç 82 Etat_1érrinç 83 Etat_2érrinç
1 1 1
84 V9+
LS4
85 KM2+ V2M+ V3+ V5+ V6+
cd1 + cd2 + cd3
86 V9-
LS4
87 KM2-
T 26 /5S / XE84
88 VM2- V3-
FS1 . T 27 / 10S / XE85
89 V5- V6-
Grafcet 6: Macro-étape M8 (rinçage_Soutireuse) 1/2
- cd1 = FS1 . Etat_cycle_rinç . T 71/ 15M / XE82 *
- cd2 = FS1 . Etat_1érrinç . T 25 /15M / XE82 *
- cd3 = FS1 . Etat_2érrinç . T 70 /15M / XE82 *
* Les temps alloués pour le rinçage de la soutireuse (temporisateur T 25; T 70 ; T 71) est
déterminé par l’opérateur via le pupitre de contrôle commande OP27
45 Automatisation d’une centrale C.I.P
SEABG
Etat_cycle_rinç Etat_1érrinç Etat_2érrinç
886 Fin_cycle_rinç 887 Fin_1érrinç 888 Fin_2érrinç
Etat_cycle_rinç Etat_1érrinç Etat_2érrinç
Début_injec_ Fin_cycle_
soude cip
1 1 1
S899
Grafcet 7: Macro-étape M8 (rinçage_Soutireuse) 1/2
46 Automatisation d’une centrale C.I.P
SEABG
E70
Début_injec_soude
71 État_injec_soude V1+
LS4
72 KM2+ VM2+ V3+ V5+ V7+
FS1 . T 21 /15M / XE92 *
73 V1-
LS4
74 KM2-
T 77 / 5S / XE94
75 VM2- V3-
T 22 / 1M / XE95
76 V5- V6+ V7-
FS1 . T 23 / 10S / XE96
S77 V6- Fin_injec_soude
Soude_prête État_injec_soude
S78
Grafcet 8: Macro-étape M9 (injec_soude_caustique)
* Le temps alloué pour l’injection de la solution soude caustique (temporisateur T 92) est
déterminé par l’opérateur via le pupitre de contrôle commande OP27
47 Automatisation d’une centrale C.I.P
SEABG
2.2. Etude du régulateur PID de l’échangeur
Pour amener la solution de soude caustique à la température désirée lors du cycle
« préparation_tank_soude » l’utilisation d’un échangeur thermique est primordiale pour
l’accomplissement de cette tâche.
Dans cette partie, nous commençons par la modélisation de l’échangeur tubulaire
horizontale puis nous passons à la détermination des paramètres du régulateur de température
associé.
L’échangeur représenté dans la Figure 12 est alimenté en vapeur d’eau à la température
θa et avec un débit volumique kS (S section d’alimentation) réglable par une vanne modulante
VM1. L’eau pénètre dans l’échangeur à la température de référence Te = θref, avec un débit q
constant. Les températures de sortie sont θv pour la vapeur, et θs pour l’eau, mais cette
dernière ne peut être mesurée qu’en θm avec un retard de tr second.
Figure 12: Modélisation de l'échangeur [6]
Soit les paramètres suivants
- S section d’alimentation
- θv température du vapeur et température θs mesurée par θm
48 Automatisation d’une centrale C.I.P
SEABG
- R : résistance thermique moyenne globale de l’échangeur thermique, exprimée en W.m-2.K-1
- C : capacité calorifique, exprimée en J / °C
- C = m.c ; c: capacité calorifique massique exprimée en J.kg-1 /°C
- ρ: masse volumique, exprimé en kg/m3
2.2.1. Fonction de transfert de l’échangeur :
Une modélisation faite par le Pr. I. Zambettakis [6] nous conduit à la fonction de
transfert suivante (Annexe 1) :
(1)
Les paramètres a, b, c, f et g s’exprimant, en fonction des paramètres donnés, par :
Puis pour le transfert (δθm / δS) il faut traduire le fait que la mesure θm de θs est effectué
par un capteur (PT100) qui présente uniquement un retard tr, soit :
49 Automatisation d’une centrale C.I.P
SEABG
Le retard s’exprimant en calcul opérationnel par l’opérateur de retard e-tr p, il vient :
Donc :
(2)
2.2.2. Schéma fonctionnel
(a) schéma fonctionnel du processus seul (en boucle ouverte) :
(b) asservissement à l’aide d’un thermocouple et d’un système bielle
manivelle qui permettent d’actionner la vanne:
(c) En assimilant le thermocouple et le système bielle manivelle à un gain
K, il vient successivement les schémas équivalents suivants :
50 Automatisation d’une centrale C.I.P
SEABG
2.2.3. Application numérique
En se basant sur les caractéristiques physiques de la vapeur saturée développées dans le
tableau de « l’Annexe 2» ainsi que de la définition de la chaleur massique expliquée dans
« l’Annexe 3 », on a réalisé le tableau suivant concernant le fluide de chauffage et le fluide
chauffé par l’échangeur tubulaire utilisé dans la centrale CIP à concevoir.
Tableau X: Caractéristique physique du fluide chauffant et du fluide chauffé
Pression Masse Capacité Capacité
(bar) volumique calorifique calorifique
(kg/m3) massique (KJ/°C)
c (KJKg-1K-1) C = m.c
Fluide de Vapeur 8 4.162 2,4951 0.052
chauffage Saturée (5l)
Fluide Eau (2l) 6 990 4,18 8.276
chauffé
On a procédé à des prélèvements des températures du vapeur entrant à l’échangeur et
sortant sous forme d’eau condensé ainsi que de l’eau chauffé et de la section d’ouverture de la
vanne modulante à un point de fonctionnement précis de la procédure actuelle de chauffage :
- Température de la vapeur venant de la chaudière θa = 175°C
- Température de la vapeur sortant de l’échangeur (sous forme d’eau condensé)
θv0 = 70°C
- Température de l’eau sortant de l’échangeur θs0 = 30°C
- Le diamètre de la vanne modulante est 34 mm, donc la section ouverte, au
point de fonctionnement, de la vanne modulante (VM1) est : S0 = 9.08 .10-4 m2
- Le débit de l’eau sortant de la cuve soude est : q = 35 m3h-1
Le calcule de la valeur du coefficient Kv de la vanne modulante dépend des
conditions et du type de l’installation, telles que le débit, la densité du fluide et la pression
en amont. L’équation adoptée pour la vapeur saturée est la suivante (d’après ThermExel):
G
Kv = (3)
11.2.P1
51 Automatisation d’une centrale C.I.P
SEABG
Avec :
• G : Débit de la vapeur (kg/h)
• P1 : Pression en amont par rapport à la vanne modulante VM1 (bar)
G = 620 kg/h ; P1 = 8 bar => Kv = 6,92 m3h-1
Etant donnée que l’échangeur thermique choisit pour la centrale NEP est tubulaire
horizontale en inoxe ; ce choix a été effectué pour diminuer la dégradation, éliminer le
coefficient d’encrassement, en tenant compte du fluide de chauffage et du fluide chauffé
et en se basant sur les donnée fournies par le constructeur la résistance moyenne de
l’échangeur est comme suit : R = 5000W-1.m2.K
Ces données nous conduisent à la détermination des paramètres de la fonction
transfert du modèle échangeur :
a = 145,105. 103 ; b = 38, 46 .10-4 ; c = 1,251
f = 1.75 .104 ; g = 24,166 .10-6
θs ( p) 3 .5
T ( p) = = (4)
S ( p) p + 17.5 p + 2.1892
2
K0
Ou encore T (p) = (5)
(1 + τ 1 p)(1 + τ 2 p)
Avec τ1= 0.13 et τ2 = 17.37 et K0 = 3.5
2.2.4. Détermination des paramètres du régulateur :
On rappelle que le rôle d’un régulateur est de maintenir la grandeur régulée à une valeur
de la consigne malgré la présence des perturbations dans le fonctionnement en régulation ou
suivre la variation d’une consigne dans le fonctionnement en asservissement. Au moyen du
choix des actions et de leurs paramètres, il est possible d’obtenir un comportement désiré en
boucle fermée, caractérisant les performances du système.
De manière qualitative, les critères à satisfaire sont les suivants :
52 Automatisation d’une centrale C.I.P
SEABG
Les effets de perturbations doivent être minimisés ou encore mieux, ils
doivent être éliminer complètement et ce, le plus rapidement possible.
Les changements de consigne doivent être suivis rapidement et avec une
bonne précision.
De manière quantitative, il s’agit de proposer les actions (P,I,D) du régulateur et de
leurs paramètres (Kp, Ti, Td) répondant le mieux possible aux spécifications d’un cahier de
charges.
Méthodes directes : Méthodes du modèle
Les méthodes directes (théoriques) sont très nombreuses et reposent sur la connaissance
d’un modèle précis du système à commander. Les performances réelles obtenues dépendent
da la qualité du modèle et son aptitude à représenter le mieux possible le procédé. Parmi ces
méthodes on propose deux variantes de la méthode du modèle : une basée sur la donnée de la
fonction de transfert en boucle fermée répondant à un cahier de charges et l’autre basée sur la
donnée de la fonction de transfert en boucle ouverte. Pour la régulation de température à faire
on se limitera à l’utilisation de la méthode du modèle basée sur la fonction de transfert en
boucle fermée.
La structure du système en boucle fermée est la suivante :
θd(p) ε(p) θs(p) S(p)
+ C(p) T(p)
Figure 13 : implémentation du régulateur
La fonction de transfert en boucle ouverte est G (p) = C (p) T (p)
La fonction de transfert en boucle fermée est:
C ( p ).T ( p )
F ( p) = (6)
1 + C ( p ).T ( p )
53 Automatisation d’une centrale C.I.P
SEABG
De ce fait, le régulateur C (p) est déterminé par la relation suivante :
F ( p)
C ( p) = (7)
T ( p ) × (1 − F ( p ))
La réalisabilité de C (p) est conditionnée par la différence des degrés des polynômes
entre le numérateur et le dénominateur de cette fonction de transfert. En effet, on dit qu’un
transfert est réalisable si le degré du dénominateur est supérieur ou égal à celui du
numérateur.
Usuellement, le comportement souhaité en boucle fermée est celui d’un système d’ordre
un ou d’ordre deux avec un gain statique unitaire, ce qui permet une précision statique
parfaite.
Application : Soit Fd (p) la fonction de transfert désirée en boucle fermée :
e −Tu . p
Fd ( p ) = K
1 + Ta. p
Où τ est choisi de manière à fixer le temps de réponse. Le régulateur C (p) est alors :
1
C ( p) =
T ( p )τ . p
On note au passage que le régulateur apporte une intégration ce qui assure une précision
statique parfaite.
Puisque le système admet la fonction de transfert suivante :
K0
T ( p) =
(1 + τ 1 p)(1 + τ 2 p)
C (p) peut être exprimé de trois manières :
•
(1 + τ 1 p )(1 + τ 2 p ) τ1 1
(1 + τ 2 p )
C ( p) = = 1 + (8)
K 0τ . p K 0τ τ1 p
54 Automatisation d’une centrale C.I.P
SEABG
Le régulateur résultant est donc un PID de type série avec les paramètres :
τ1
Kp =
K 0τ
Ti = τ 1
Td = τ 2
τ1 + τ 2 1 ττ
C ( p) = (1 + + 1 2 p) PID mixte (9)
K 0τ (τ 1 + τ 2 ) p τ 1 + τ 2
τ1 + τ 2 1 ττ
C ( p) = + + 1 2 p PID parallèle (10)
K 0τ K 0τ . p K 0τ
Remarques :
• On aurait pu affecter à Ti la constante de temps τ2 et à Td la constante de temps
τ1. En pratique, on fait le choix de manière à ce que Ti soit plus grande à Td.
• Il convient dans tous les cas d’ajouter un filtre passe-bas à l’étage réalisant
l’action dérivée ou au montage réalisant C (p) comme le montre les expressions
suivantes par exemple:
τ1 + τ 2 1 ττ p 1
C ( p) = (1 + + 1 2 )
K 0τ (τ 1 + τ 2 ) p τ 1 + τ 2 1 + τ 0 p
1 τ1 +τ 2 1 ττ p (11)
C ( p) = (1 + + 1 2 )
1 + τ 0 p K 0τ (τ 1 + τ 2 ) p τ 1 + τ 2
τ0 doit être choisi de manière à réaliser une bonne qualité de filtrage des hautes
fréquences sans pénaliser le système par l’ajout de cette constante de temps. En faite τ0 n’est
pas un paramètre de synthèse comme Kp, Ti et Td, mais plutôt un paramètre de réglage
supplémentaire d’ordre pratique.
• Dans la méthode du modèle, C (p) s’obtient par inversion du modèle du
procédé :
F ( p)
C ( p) =
T ( p )(1 − F ( p ))
55 Automatisation d’une centrale C.I.P
SEABG
De ce fait, elle ne convient pas pour les systèmes pour lesquels la fonction de transfert
possède un retard pur ou un zéro instable c'est-à-dire à partie réelle positive ce qui n’est pas le
cas pour notre système; car dans le premier cas C (p) est irréalisable (présence d’opérateur
avance) et dans le second cas, le régulateur est instable :
N ( p) D( p ) Fd ( p )
T ( p ) = e −Tp T0 ( p ) = e −Tp ⇒ C ( p ) = e Tp
D( p) N ( p ) 1 − Fd ( p )
N ( p) ( p − a ) D( p) Fd ( p )
T ( p) = = avec a > 0 ⇒ C ( p ) =
D( p) D( p) ( p − a ) K 1 − Fd ( p )
Détermination des paramètres du régulateur de température PID
D’après la fonction de transfert de l’équation (5) τ1= 0.13 et τ2 = 17.37 et K0 = 3.5
On souhaite obtenir un comportement d’ordre 1 en boucle fermée avec un temps de
réponse à 5% égal 0.6 s (τ0) et une précision statique parfaite.
De ce cahier de charges on déduit que la fonction de transfert en boucle fermée doit être
d’ordre un, de constante de temps τ = 0.2 s et de gain statique unitaire; soit donc :
1
F ( p) = (12)
1 + 0 .2 p
En retenant un régulateur PID de type mixte filtré, on a :
τ1 + τ 2 1 ττ 1
C ( p) = + + 1 2⋅ (13)
K 0τ K 0τ ⋅ p K 0τ 1 + τ 0 p
1 3.22 p
C ( p ) = 25 + +
0 .7 p 1 + 0 .6 p
La réponse indicielle du système avec le régulateur est représentée par la Figure 13.
56 Automatisation d’une centrale C.I.P
SEABG
Figure 14: Vérification du cahier de charge
On remarque que les conditions du cahier de charge sont vérifiée puisque d’après la
réponse indicielle le système en boucle fermée possède un comportement d’un système de 1ér
ordre avec un temps de réponse égale à 5% et une précision statique parfaite.
Ainsi, le régulateur PID a permis
- d’améliorer le temps de réponse (action proportionnel)
- d’annuler l’erreur statique (action intégrale)
- d’amélioré la stabilité (action dérivateur)
Remarque :
Les constantes de temps et le gain du régulateur déterminés dans ce chapitre ne sont pas
les valeurs finals à implémenter dans le système réel, puisque pendant la modélisation on a
négligé les perturbation tel que la variation du débit et plusieurs valeurs utilisées sont des
approximations, car les valeurs réelles sont très difficiles à déterminer et parfois impossible
tel que la résistivité de l’échangeur. Pour cela les paramètres du régulateur de température,
déterminés dans ce chapitre, vont servir comme référence lors de la réalisation des tests sur le
système réel.
57 Automatisation d’une centrale C.I.P
SEABG
2.3. Conception du graphe GEMMA
Le GEMMA (Guide d’Etude des Modes Marche Arrêt), guide graphique élaboré par
l'ADEPA (Agence pour le développement de la productique appliquée), est un « outil-
méthode » qui permet de mieux définir les modes de marches et Arrêt d’un système industriel
automatisé. Le guide graphique qui rempli progressivement lors de la conception du système
ce qui permet de sélectionner et déduire les différents états de Marches et d’arrêts ainsi que la
possibilités d’évoluer d’un état à un autre. C’est un outil d’aide à l’analyse, d’aide à la
synthèse du cahier des charges et d’aide à la conduite de la machine, à ça maintenance ainsi
qu’à son évolution.
2.3.1. Concepts de base
Le GEMMA constitue une méthode d’approche des modes de marches et des arrêts,
fondée sur quelques concepts de base matérialisés par un guide graphique (Figure 3.2). La
démarche proposée comporte deux étapes :
- le recensement des différents modes envisagés, et la mise en évidence des
enchaînements qui les relient.
- La détermination des conditions de passage d’un mode à un autre.
On peut classer les modes de marche en 3 grandes familles:
• Famille F: procédures de fonctionnement
• Famille A: procédures d'arrêt
• Famille D: procédures de défaillance
Dans chaque famille on peut distinguer plusieurs états pour la partie opérative:
Etats de fonctionnement: F1 F2 F3 F4 F5 F6
Etats d'arrêt: A1 A2 A3 A4 A5 A6 A7
Etats de défaillance: D1 D2 D3
58 Automatisation d’une centrale C.I.P
SEABG
Figure 15: Guide graphique Gemma [7]
Parmi les états proposés par le guide on choisit ceux qui sont nécessaires pour la
machine et on précisera le nom de chacun des états et des commentaires éventuels, à
l'intérieur du "rectangle-état" correspondant.
Les arcs de liaison entre états sont utilisés pour préciser les informations de passage
d'un état à un autre. On peut passer d'un état à un autre:
1. Avec une condition d'évolution: elle est portée sur la liaison orientée
entre états; elle peut être liée à l'action d'un bouton du pupitre de commande ou à l'état
d'un capteur.
2. Sans condition explicite
Les besoins en boutons poussoirs et en capteurs peuvent alors être prévus.
59 Automatisation d’une centrale C.I.P
SEABG
2.3.2. Construction du graphe GEMMA de la centrale de nettoyage en
place
Les conditions d’évolutions entre les modes de marches et d’arrêt sont maintenant
portées sur le GEMMA comme le montre la Figure 15.
• Sur le pupitre de commande (figure2.3), un sélecteur principal permet de choisir entre
les options « S.Auto » et « S.Manu ».
• A l’option automatique correspondent :
- Deux boutons poussoirs « B.Marche » et « B.arrêt » dont l’action est mise en
mémoire.
- L’action simultanée sur « S.Auto » et « B.Start » active la condition de marche
« auto ».
- L’action simultanée sur « S.Auto » et « B.Stop » active la condition d’arrêt « arrêt ».
- Ces boutons permettent d’explorer les états A1, F1, F6 et D3.
- L’état D3 « Production tout de même » n’est activé que si la machine exécute le cycle
« préparation_tank_soude » et que la sonde de niveau bas du réservoir de la soude
indique qu’il vide. De ce fait, la solution de soude circule dans un circuit fermé et un
alarme se déclanche jusqu’au ravitaillement du réservoir en soude.
• A l’option « manuel » correspondent les états :
- F4 : « marche de vérification dans le désordre », qui permet l’ouverture et la fermeture
des vannes ainsi que la mise en marches des moteurs sans respecter l’ordre tout en
prenant en compte les alarmes en cours.
- A5 : « préparation pour remise en route », cet arrêt permet de faire les vérifications et
le nettoyage de la machine.
- A6 : « mise de la PO dans état initiale », qui permet la mise à zéro des consignes
(demande cycle, température et conductivité de la soude désiré) pour un redémarrage à
l’état initiale.
• Le bouton d’arrêt d’urgence « AU » permet de passer à l’état D1, depuis tous les états.
• Le bouton poussoir « reset » permet d’activer l’état A7 ce qui permet d’effacer les
défauts et de relancer la machine après sa remise à zéro.
60 Automatisation d’une centrale C.I.P
SEABG
Figure 16: Gemma de la centrale de nettoyage en place
61 Automatisation d’une centrale C.I.P
SEABG
Conclusion
Au cours de ce chapitre, nous avons commencé par construire les Grafcet décrivant le
fonctionnement de la procédure de nettoyage en place, ainsi que le guide graphique GEMMA
adéquat à notre système. Ce guide est un outil complémentaire au Grafcet, il nous a permis
d'exprimer de façon claire et complète les besoins en modes de marche et d’arrêt du système
automatisé.
Cette étude est très importante puisqu’elle va nous éviter des modifications longues et
coûteuses du système après réalisation.
Enfin, en partant d’une modélisation de notre échangeur thermique nous avons
déterminé des approximations des paramètres du régulateur de température à programmer et
ce en utilisant la méthode du modèle en boucle fermée.
Dans le chapitre suivant on va programmer la centrale de nettoyage en place présentée
dans les chapitres précédents ainsi que le régulateur de température étudié dans ce chapitre.
62 Automatisation d’une centrale C.I.P
SEABG
CHAPITRE III :
Implémentation et validation de
l’automatisation de la centrale CIP
63 Automatisation d’une centrale C.I.P
SEABG
Introduction
Dans ce chapitre, nous présentons en premier lieu l’API S7-300 et son environnement
de développement. Ensuite, nous discutons de l’application que nous avons développée et de
sa validation.
3.1. API et environnement de développement
3.1.1 Automate programmable industriel (API)
L’automate programmable se présente comme un ensemble de blocs fonctionnels
s’articulant autour d’un canal de communication : le bus interne. (Figure 16)
Figure 17: Organisation modulaire de l'API
Les automates Siemens S -300 appartiennent à la gamme des automates modulaires. Ils
sont programmés par l’intermédiaire du logiciel SIMATIC MANAGER STEP7 qui permet
entre autre :
- La configuration et le paramétrage du matériel.
- Le paramétrage de la communication.
- La programmation.
- Le test, la mise en service et la maintenance.
64 Automatisation d’une centrale C.I.P
SEABG
Chaque module de l’API possède un bornier de raccordement équipé d’un ensemble de
visualisation de l’état logique de chaque voie (diodes électroluminescentes et conducteurs
optiques). Deux types de raccordement vers l’extérieur sont utilisés : les liaisons « fil à fil »
ou les liaisons « séries » ou « parallèle ».
Pour la centrale de nettoyage en place, l’automatisation sera faite avec une station
ET300 contrôlée par un S7-314(V1.2)-2dp PLC programmé par l’outil STEP7 de SIMATIC
Manager conçue par Siemens. Le tableau suivant comprend les modules nécessaires pour
l’automatisation de la centrale de nettoyage en place.
Tableau XI: Spécification du matériel
Qty Module description Référence siemens
1 Unité centrale Mémoire de travail 24 Ko; 6ES7 314-1AE04-0AB0
(CPU 314 (V1.1)) 0,3ms/kinst; port MPI;
configuration à plusieurs rangées
jusqu à 32 modules;
communication S7 (FB/FC
chargeables); firmware V1.2
1 Module d’alimentation Alimentation externe 6ES7 307-1EA00-0AA0
120/230 V c.a.:24 V c.c. /5 A
1 Module d’entrée Module d'entrées TOR DI 6ES7 321-7BH00-0AB0
logique (16 entrées) 16xDC24V, avec alarmes de
processus et de diagnostic, par
groupes de 16 voies,
paramétrable en ligne
1 Module de sorties Module de 32 sorties TOR, 6ES7 322-1BL00-0AA0
logique (32sorties) 24 V/0,5 A, par groupes de 8
1 Module d’entrée Module de 8 entrées 6ES7 331-7KF02-0AB0
analogique (8 entrées) analogiques, 12...14 bits
1 Module de sortie Module de 4 sorties analogiques, 6ES7 332-5HD01-0AA0
analogique (4 sorties) 12 bits, paramétrable en ligne
* le choix des modules est effectué en fonction des contraintes de processus et du matériel disponible
dans le stock.
65 Automatisation d’une centrale C.I.P
SEABG
La Figure 17 montre les besoins matériels permettant la programmation et la simulation
d’une application sur une station ET300.
Figure 18: Station ET300
1- PC, système d'exploitation Windows 95/98/NT avec :
- Configuration minimale : 133MHz et 64Mo RAM, espace disque dur disponible 65 Mo
- Configuration optimale : 500MHz et 128Mo RAM, espace disque dur disponible 65 Mo
2- Logiciel STEP7 V 5.2
3- Interface MPI pour PC (par exemple adaptateur PC)
4- Automate SIMATIC S7-300 avec ces modules d'entrées/sorties (TOR., Analogique)
3.1.2. Langage de programmation pour SIMATIC
Les langages de programmation CONT, LIST et LOG pour S7-300/400 font partie
intégrante du logiciel de base.
• Le schéma à contacts (CONT) est un langage de programmation graphique. La
syntaxe des instructions fait penser aux schémas de circuits. CONT permet de
suivre facilement le trajet du courant entre les barres d’alimentation en passant
par les contacts, les éléments complexes et les bobines
• La liste d’instruction (LIST) est un langage de programmation textuel proche de
la machine.
• Le logigramme (LOG) est un langage de programmation graphique qui utile les
boîtes d’algèbre de Boule pour représenter les opérations logiques.
66 Automatisation d’une centrale C.I.P
SEABG
3.2. Implémentation de l’application
Pour programmer notre application nous avons procédé comme suit :
- réalisation de la configuration matérielle
- programmation des blocs nécessaires pour la tâche d’automatisation
- simulation du programme avec le simulateur S7-PLCSIM
- simulation et test du programme sur le CPU
- Programmation du pupitre de commande avec Protool PRO CS.
3.2.1. Configuration matérielle :
Nous avons commencé par la réalisation de la configuration matérielle de l’automate
programmable. Grâce à cette étape, nous avons déterminé les plages d’adresses physiques des
entrées et des sorties.
La figure détaille les emplacements des différents modules de notre station sur le
châssis ainsi que les plages d’adresses des entrées sorties :
Figure 19: Emplacement des modules
Emplacement 1 : module d’alimentation
Emplacement 2 : unité centrale
Emplacement 3 : vide (réservé au module de couplage)
Emplacement 4 à 7 : les modules d’Entrées / Sorties
3.2.1.1. Affectation des entrées numériques
Dans le tableau XII, nous affectons à chaque entrée logique une adresse physique.
67 Automatisation d’une centrale C.I.P
SEABG
Tableau XII: Affectation des entrées logiques
Adresse Mnémonique Type de commentaire
physique donnée
E0.0 LS1 Bool Sonde de niveau haut de la cuve_soude
E0.1 LS2 Bool Sonde de niveau bas de la cuve_soude
E0.2 LS3 Bool Sonde de niveau bas réservoir_soude
E0.3 LS4 Bool Sonde de niveau haut circuit détergent
E0.4 FS1 Bool Détecteur de débit
E0.5 DP1 Bool Détecteur de proximité
E0.6 RESET Bool Bouton poussoir reset
E0.7 B.STOP Bool Bouton poussoir stop
E1.0 B.START Bool Bouton poussoir start
E1.1 S.MANU Bool Commutateur position « Manu »
E1.2 S.AUTO Bool Commutateur position « Auto »
E1.3 B.URGENCE Bool Bouton d’arrêt d’urgence
E1.4 soutireuse_prete Bool La soutireuse est prête pour un cycle C.I.P
E1.5 sout_mode_auto Bool La soutireuse est en mode automatique
E1.6 eau_disponible Bool L’eau traitée est disponible dans l’unité de
traitement d’eau
E1.7 vapeur_disponible Bool La vapeur est disponible dans la chaudière.
3.2.1.2. Affectation des sorties numériques
Dans le tableau XIII, nous affectons à chaque sortie logique une adresse physique.
Tableau XIII: Affectation des sorties logiques
Adresse Mnémonique Type de commentaire
physique donnée
A4.0 V1 Bool Ouverture de la vanne V1
A4.2 V3 Bool Ouverture de la vanne V3
A4.3 V4 Bool Ouverture de la vanne V4
A4.4 V5 Bool Ouverture de la vanne V5
A4.5 V6 Bool Ouverture de la vanne V6
A4.6 V7 Bool Ouverture de la vanne V7
A4.7 V8 Bool Ouverture de la vanne V8
A5.0 V9 Bool Ouverture de la vanne V9
A5.1 V10 Bool Ouverture de la vanne V10
A5.2 KM1 Bool Mise en marche du moteur associé à la pompe P1
A5.3 KM2 Bool Mise en marche du moteur associé à la pompe P2
A5.4 L.MARCHE Bool Allumage de la lampe « système en marche »
A5.5 L.ARRET Bool Allumage de la lampe « système en arrêt »
A5.6 dem_autor_sout Bool Demande d’autorisation pour le nettoyage de la
soutireuse
A5.7 dem_eau Bool Demande eau de l’unité de traitement d’eau
A6.0 dem_vap Bool Demande vapeur de la chaudière
A6.1 –A7.7 NON UTILISEES
68 Automatisation d’une centrale C.I.P
SEABG
3.2.1.3. Affectation des entrées analogiques
Dans le tableau XV, nous affectons à chaque entrée analogique une adresse physique.
Tableau XIV: Affectation des entrées analogiques
Adresse Mnémonique Type de commentaire
physique donnée
PEW288 TIC1 *Word Transducteur Indicateur de température TIC1
PEW290 TIC2 Word Transducteur Indicateur de température TIC2
PEW292 TC1 Word Transducteur Indicateur de conductivité TC1
PEW294– NON UTILISEES
PEW302
* Word = 2octects = 32bits
A l’aide de l’option « propriétés des modules » nous déterminons les propriétés des
entrées analogiques, utilisées dans l’application selon leurs caractéristiques (type, plage,
position de l’adapter de la plage de mesure) (Figure 19).
Figure 20: Propriétés des entrées analogiques
• TIC1 et TIC2 : Transducteur de mesure 4 fils (4-20 mA)
• TC1 : Transducteur de mesure 2 fils (4-20 mA)
3.2.1.4. Identification des sorties analogiques
Dans le tableau XV, nous affectons à chaque sortie analogique une adresse physique.
Tableau XV: Affectation des sorties analogiques
Adresse physique Mnémonique Type de commentaire
donnée
PAW304 VM1 Word Commande de la vanne modulante VM1
PAW306 VM2 Word Commande de la vanne modulante VM2
PAW308–PAW310 NON UTILISEES
69 Automatisation d’une centrale C.I.P
SEABG
A l’aide de l’option « propriétés des modules », nous déterminons les propriétés des
sorties analogiques, utilisées dans l’application selon leurs caractéristiques (type, plage,
comportement à l’arrêt de la CPU) (voir Figure 20).
Figure 21: Caractéristiques des sorties analogiques
* L’automate commande les deux vannes modulantes par la commande du courant à l’entrée du
convertisseur courant/pression adéquat à chaque vanne modulante
3.2.2. Implémentation des fonctions de l’application
La structure du programme présenté dans la Figure 21, décrit la hiérarchie d’appel des
blocs à l’intérieur du programme utilisateur S7. On obtient ainsi un aperçu des blocs utilisés,
de leur relation et leur besoin en données locales.
Figure 22: Structure de programme utilisateur S7 de l'application
3.2.2.1. Bloc d’organisation (OB1)
Le bloc d’organisation OB1 constitue l’interface entre le système d’exploitation de la
CPU et le programme utilisateur ; il contient le programme principal. Les fonctions FC1, FC2,
FC3, FC4, FC5, FC6 et FC11, sont appelées et les paramètres spécifiques nécessaires pour la
commande du processus sont transmis dans l'OB1.
70 Automatisation d’une centrale C.I.P
SEABG
Le tableau suivant contient les variables temporaires (Temp) del’OB1. Les noms sont de
variable choisis sont les noms par défaut de l’OB1.
Tableau XVI: Les variables temporaires de l'OB1
Nom Adresse Déclaration Type Commentaire
OB1_EV_CLASS 0.0 TEMP BYTE Classe et code d’événement :
B#16#11 : OB1 est actif
OB1_SCAN1 1.0 TEMP BYTE - B#16#01 : fin démarrage à chaud
- B#16#02 : fin de redémarrage
- B#16#03 : fin de cycle libre
- B#16#04 : fin de démarrage à froid
- B#16#05 : premier cycle de l’OB1
de la nouvelle CPU maître après
commutation maître réserve et arrêt
de la CPU maître.
OB1_PRIORITY 2.0 TEMP BYTE Classe de priorité : 1
OB1_OB_NUMBR 3.0 TEMP BYTE Numéro de l’OB1 (01)
OB1_RESERVED_1 4.0 TEMP BYTE Réservé
OB1_RESERVED_2 5.0 TEMP BYTE Réservé
OB1_PREV_CYCLE 6.0 TEMP INT Durée du cycle précédent en ms
OB1_MIN_CYCLE 8.0 TEMP INT Temps de cycle minimal en ms
depuis la dernière mise en route
OB1_MAX_CYCLE 10.0 TEMP INT Temps de cycle maximal en ms
depuis la dernière mise en route
OB1_DATE_TIME 12.0 TEMP DATE Date et heure de demande de l’OB1
_AND
_TIME
A l’aide de l’opération « CALL » on appelle les différentes fonctions nécessaires pour
l’exécution du programme principale. A titre d’exemple, la Figure 22 illustre l’appelle des
deux fonctions FC1 et FC3.
Figure 23: Appelle des fonctions FC1 et FC3
71 Automatisation d’une centrale C.I.P
SEABG
3.2.2.2. La fonction (FC1)
les entrées logiques :
Dans la fonction FC1 ou fonction « FC entrées », on affecte à chaque entrée logique une
mnémonique avec un retard de 3s (Figure 23) pour éliminer les perturbations d’une part et
pour des commodités de programmation d’autre part (en cas de changement d’un module
d’entrées ; changement d’adressage physique des entrées, on effectue des modifications sur la
FC1 et le reste du programme reste intact).
Figure 24: Affectation des mnémoniques des entrées logiques
Si le contact de la sonde niveau reste fermé pendant 3s alors le mnémonique LS1. correspond est mis à 1.
Si le contact de la sonde niveau reste ouvert pendant 3s alors le mnémonique LS1. correspond est mis à 0.
les entrées analogiques :
Les entrées analogiques telles que la mesure de la température et de la conductivité sont
traitées de la manière suivante :
- Conversion de la valeur numérique lue par le module analogique du format entier
(16bits) au format réel (32 bits avec virgules flottante) (Figure 24)
72 Automatisation d’une centrale C.I.P
SEABG
Figure 25: Conversion de la valeur numérique du format entier au format réel
- Normalisation de la valeur analogique (température) : la rendre comprise entre 0% et
100% de la valeur max. Cette valeur normalisée va être utilisée par le régulateur de
température. (Figure 25)
Figure 26: Normalisation de la valeur de température détectée
73 Automatisation d’une centrale C.I.P
SEABG
comparaison de la consigne avec la mesure:
La fonction FC1 contient le code qui permet la comparaison de la consigne, déterminée
par l’opérateur, avec la mesure de la température ou de la concentration. Le résultat de cette
comparaison servira par la suite pour la régulation de température et de la concentration
(Figure 26).
Figure 27: Comparaison de la consigne avec la mesure
3.2.2.3. La fonction (FC2)
Dans la fonction FC2 ou fonction « FC sortie CPU », on affecte à chaque adresse
physique de sortie, la mnémonique correspondante comme le montre la « Figure 27 ».
L’intérêt de ces opérations est d’avoir un programme fiable (en cas de changement d’un
module de sortie ; changement d’adressage physique des sorites, on effectue des
modifications sur la FC1 et le reste du programme reste intacte).
Figure 28: Sortie CPU
74 Automatisation d’une centrale C.I.P
SEABG
3.2.2.4. La fonction (FC4)
La fonction FC4 ou encore « FC Auto Manu » contient les conditions de marche
automatique et manuelle (Figure 28) :
- MANU : condition de marche manuelle valide
- AUTO : condition de marche automatique valide
Figure 29: Condition de marche AUTO/MANU
3.2.2.5. La fonction (FC3)
La fonction FC3 ou encore « FC Alarme », gère toutes les conditions d’arrêt dues à une
alarme. Les alarmes ont été détaillées dans les chapitres précédents et sont :
- Alarme_ cuve_ soude.
- Alarme_pompe_P1
- Alarme_pompe_P2
- Alarme_ soutireuse : si la soutireuse ne répond pas au CPU, cinq minutes après la
demande d’autorisation ou si la soutireuse n’est plus prête durant le cycle de
nettoyage, alors il y aura déclanchement d’alarme
- Alarme_ vapeur : si la chaudière ne répond pas au CPU, cinq minutes après la
demande d’autorisation ou s’il n’y a plus de vapeur durant le cycle de nettoyage, alors
il y aura déclanchement d’alarme.
- Alarme _eau : si l’unité de traitement d’eau ne répond pas au CPU, cinq minutes après
la demande d’autorisation ou s’il n’y a plus d’eau durant le cycle de nettoyage, alors il
y aura déclanchement d’alarme.
75 Automatisation d’une centrale C.I.P
SEABG
Si l’une des alarmes présentées ci-dessous est déclenchée alors le bit d’alarme est mis à
un, le système passe à l’état d’arrêt et la lampe d’arrêt s’allume. Une fois la condition
d’alarme est acquittée alors une action sur le bouton poussoir RESET pendant 3s remet le
système en marche. (Figure 5.15)
Figure 30: Mise à un de l'alarme
3.2.2.6. La fonction (FC11)
La fonction FC11 ou encore « FC Grafcet », comprend la programmation de la structure
des Grafcets présentée dans le chapitre 3 ; condition d’activation et de désactivation des
étapes et des transition. (Figure 30)
Figure 31: Transitions et étapes de rinçage
76 Automatisation d’une centrale C.I.P
SEABG
3.2.2.7. La fonction (FC5)
La fonction FC5 ou encore « FC EXCH », contient les différentes combinaisons
permettant l’activation et la désactivation des différents actionneurs (pompes, vannes).
Figure 32: Mise en marche de la pompe P1
La pompe (ou moteur de la pompe) peut être mise en marche en mode automatique seulement lorsque l’étape
XE6 est activé alors que si l’alarme « ALL P1 » est enclenché alors elle passe à l’arrêt.
3.2.2.8. La fonction (FC6)
La fonction FC6 ou encore « FC_ régulateur_ de _ Température », fait appel au bloc
fonctionnel FB58 à fin de paramétrer le régulateur de température PID avec les valeurs
déterminées dans le chapitre précédent.
Le FB 58 "TCONT_CP" ( Figure 32) sert à la régulation de processus thermiques au
moyen d'une commande continue ou impulsionnelle. On commence par créer un bloc de
donné d’instance OB1 associé au bloc fonctionnel FB58 (Figure 33), auquel on va affecter les
paramètres du régulateur PID déterminé dans le chapitre précédant, puis on procède à
paramétré les entré de ce bloc comme suit:
- EN: autorise l’activation du bloc SFB58 si et seulement si les condition de lancement
du boucle sont vraie (XE7 : température défavorable)
- COM_RST: permet l’exécution du sous programme d'initialisation de la boucle de
régulation ; dans notre cas on ne va pas l'exécuté c’est t’à dire mettre à zéro cette entrée
77 Automatisation d’une centrale C.I.P
SEABG
- MAN_ON: on le met à zéro puisqu’ on ne va pas lancer la boucle de régulation
manuellement.
- PVPER-ON: activer la mesure de la périphérie ; si on active cette entrée on doit alors
donner des paramètres pour la normalisation de la mesure de température. Dans notre cas
cette entrée sera désactivée car on a effectué précédemment la normalisation de la mesure.
- Lorsque la mise en forme des impulsions est activée, il existe plusieurs possibilités
d'appeler l'algorithme PID et la mise en forme des impulsions :
SELECT = 0 : le régulateur est appelé dans une alarme cyclique rapide ;
l'algorithme PID et la mise en forme des impulsions sont traités.
SELECT = 1 : le régulateur est appelé dans l'OB1 ; seul l'algorithme PID est
traité.
SELECT =2 : le régulateur est appelé dans une alarme cyclique rapide ; seul la
mise en forme des impulsions est traitée.
SELECT =3 : le régulateur est appelé dans une alarme cyclique plus lente ; seul
l'algorithme PID est traité.
Figure 33: Régulateur PID de température
- CYCLE_P: Cette entrée permet d'entrer la période d'échantillonnage de la mise en
forme des impulsions. En phase1, le FB 58 "TCONT_CP" calcule la période
d'échantillonnage et l'inscrit dans CYCLE_P.
78 Automatisation d’une centrale C.I.P
SEABG
- CYCLE: Valeur par défaut de la période d'échantillonnage de l'algorithme PID.
- SP_INT: consigne normalisé (pupitre de commande)
- PV_IN:mesure normalisé (indicateur transmetteur de température TIC2)
- LMN: valeur de réglage en pourcent qui devra être injecté dans l'organe de réglage.
Figure 34: Bloc d'instance associé au régulateur de température
3.2.2.9. Le bloc de donnée (DB2)
Le bloc de donnée DB2 (Figure 34), renferme les temps d’exécution des tâches de
rinçage et de nettoyage avec la soude. Ces temps sont fixés par l’opérateur via le pupitre de
contrôle commande.
Figure 35: Bloc de données DB2
79 Automatisation d’une centrale C.I.P
SEABG
3.2.2.10. Le bloc d’organisation (OB122)
Le système d'exploitation de la CPU appelle l'OB122 quand une erreur survient lors de
l'accès aux données d'un module. C'est le cas, par exemple, quand la CPU détecte une erreur
de lecture alors qu'elle accède à des données d'un module de signaux.
Le bloc OB122 est exécuté dans la même classe de priorité que le bloc interrompu. Si
l'OB122 n'est pas programmé, la CPU passe de l'état de marche à l'état d'arrêt.
3.2.3. Simulation du programme avec le simulateur S7-PLCSIM
S7-PLCSIM permet le test des programmes STEP 7 pour S7-300 et S7-400 que l'on ne
peut pas tester immédiatement sur le matériel (Figure 35). Ceci peut avoir différentes
raisons :
- Petits blocs de programme qui ne peuvent pas encore être testés dans une séquence
unique sur la machine.
- L'application est critique, car elle peut occasionner des dommages matériels ou
blessures corporelles en cas d'erreurs de programmation. La simulation permet de supprimer
ces erreurs dès la phase de test.
Dans notre cas de figure, nous avons utilisé ce logiciel pour la réalisation de notre
travail avant l’acquisition de la CPU.
Figure 36: Fenêtre du simulateur S7-PLCSIM
80 Automatisation d’une centrale C.I.P
SEABG
Dans la fenêtre du simulateur on peut mettre le CPU à l’état de marche ou arrêt. Le
simulateur nous donne la possibilité de forcer les entrées numériques et d’observer l’influence
sur les sorties.
3.2.4. Simulation avec le CPU
Pour simuler le programme utilisateur avec la CPU il faut procéder comme suit :
- Effectuer la connexion physique entre le PC et la CPU via une interface MPI pour PC
- On clique sur le bouton « Partenaire accessible » pour vérifier que tous les paramètres
sont correctes. On peut ainsi lire l'adresse MPI de la CPU qui est l'adresse par défaut
(MPI = 2)
- On insère une nouvelle table de variable par laquelle on va forcer nos variables et
visualiser nos sorties
- On appui sur le bouton « on line » pour la visualisation du programme utilisateur.
Exemples :
1- Lorsqu’on met le commutateur en position « S.AUTO » et on appui sur le bouton
poussoir « B.START » alors la condition « AUTO » est validée et la lampe
« L.MARCHE » est allumée. (figure 5.22)
Figure 37: Exemple 1 -Mode_Auto -
81 Automatisation d’une centrale C.I.P
SEABG
2- Puisque les conditions de rinçage de la cuve soude sont validées donc le temporisateur
à retard à la montée est déclenché.
Figure 38: Exemple 2 -Enclenchement du temporisateur T100 –
3- Puisque les conditions du rinçage cuve soude sont validées (eau disponible) alors les
vannes et les moteurs qui assure cette tâche sont activés.
Figure 39: Exemple 3 -Rinçage du cuve_soude
82 Automatisation d’une centrale C.I.P
SEABG
4- L’une des étapes qui peut mettre la vanne V4 en marche est activée, donc la vanne V4
est ouverte tant que l’étape est toujours activée.
Figure 40: Exemple 4 -Condition de marche de la vanne V4 –
Conclusion :
Dans ce chapitre, nous avons réalisé la tâche de programmation de l’automate
programmable industriel par l’outil « STEP7 » de SIMATIC Manager. Ensuite, nous avons
procédé à la validation de l’application. Néanmoins, la conception d’une interface de
communication entre l’opérateur et le processus de nettoyage est nécessaire pour l’efficacité
de l’application déjà développée. La conception et la programmation de cette interface feront
objet du chapitre suivant.
83 Automatisation d’une centrale C.I.P
SEABG
CHAPITRE IV :
Conception et implémentation d’une
application pupitre
84 Automatisation d’une centrale C.I.P
SEABG
Introduction
Dans ce chapitre nous allons concevoir et implémenter une interface, permettant le suivi
est et la commande du processus de nettoyage, sur un pupitre de contrôle-commande (op27)
en utilisant le logiciel ProTool.
4.1. Conception de l’application pupitre
La création d’une interface lisible sur un pupitre de contrôle-commande (OP27)
permettant l’accès aux différents paramètres de l’unité de nettoyage en place, nous permet par
la suite l’observation et la commande du processus de nettoyage.
4.1.1. Procédure de communication entre le pupitre de commande et
le processus
La communication entre le pupitre et la machine où le processus est réalisé par
l'intermédiaire de l'automate se fait au moyen de "variables". La valeur d'une variable est
écrite dans une zone mémoire (adresse) de l'automate où elle est lue par le pupitre.
La structure générale est illustrée dans la figure suivante :
Figure 41: Communications pupitre- automate- processus
85 Automatisation d’une centrale C.I.P
SEABG
4.1.2. Modèle de spécification
L’application pupitre que nous avons développée, est composée de plusieurs fenêtres
offrant plusieurs fonctionnalités à l’opérateur. La figure suivante explique la structure de base
de la hiérarchie des fenêtres :
Fenêtre
d’accueil
F9 F10 F11 F12
Synoptique Configuratio Commande Etat du
de la n des du Processus
centrale de variables de
processus
NEP la CIP
F9 F9 F10 F11 F9 F10 F9
Synoptique Commande Synoptique
Fenêtre Fenêtre de la Fenêtre de la Fenêtre
du
d’accueil d’accueil centrale de processus
d’accueil centrale de d’accueil
NEP NEP
Figure 42: hiérarchie des fenêtre de l’application pupitre
4.2. Implémentation de l’application pupitre
4.2.1. Présentation du logiciel ProTool
La version 6.0 du logiciel ProTool, est la conséquence du développement des logiciels
de conception des interfaces graphiques qui permet entre autre le développement
d’application de commande implantable sur des pupitres de commande textuels (exemple
l’OP7), ou graphiques (exemple l’OP27)…
Les données d'un projet ProTool sont regroupées sous forme d'objets. Au sein d'un
projet, les objets sont organisés dans une structure arborescente (Figure 42).
La fenêtre de projet a la structure suivante :
86 Automatisation d’une centrale C.I.P
SEABG
La ligne de titre contient le nom de projet.
La moitié gauche de la fenêtre contient les types d'objet configurables selon
le pupitre, la moitié droite affiche les objets créés.
Figure 43: Fenêtre projet du ProTool
4.2.2. Implémentation d’une application pupitre
Afin de visualiser les états du processus de NEP et de créer les bases à partir desquelles
on va commander le processus, nous avons eu recours à la création de plusieurs images dotées
d’organes d’affichage de dialogue pour l'interface utilisateur qui se présentera plus tard sur le
pupitre, par exemple afin de permettre de passer d'une image à l'autre.
Le tableau suivant comprend une description des différentes fenêtres crées permettant
le dialogue entre la machine et l’opérateur :
87 Automatisation d’une centrale C.I.P
SEABG
Tableau XVII: Description des différentes fenêtres de l'application pupitre
Fenêtre Commentaires
La « fenêtre d’accueil » permet
l’accès aux fenêtres suivantes :
F9 : si on appuie sur le bouton
F9 du pupitre de commande
OP27 alors on accède à la
fenêtre « synoptique de la
centrale de NEP »
F10 : si on appuie sur le
bouton F10 alors on accède à
la fenêtre « configuration des
Figure 5.27: Page d'accueil variables de la CIP »
F11 : si on appuie sur le
1 : c’est une zone qui permet l’affichage de la date.
bouton F11 alors on accède à
2 : c’est une zone qui permet l’affichage de l’heure.
la fenêtre « commande de
processus »
F12 : si on appuie sur le
bouton F12 alors on accède à
la fenêtre « Etat du
processus »
88 Automatisation d’une centrale C.I.P
SEABG
La fenêtre « synoptique de
la centrale CIP » permet
l’accès aux fenêtres
suivantes :
F1 : si on appuie sur le
bouton F1 du pupitre de
commande OP27 alors on
accède à la fenêtre
précédente.
Figure 5.28: Synoptique de la centrale de NEP F9 : si on appuie sur le
1 : la zone 1 permet d’indiquer l’état en cours du système, parmi les bouton F9 du pupitre de
états systèmes : commande OP27 alors on
- PREP_SOUDE : préparation de la cuve soude en cours. revient à la fenêtre « la
- CYCLE_RINC : le cycle de rinçage en cours fenêtre d’accueil »
- RIN_1 : 1ér rinçage en cours du cycle CIP
- INJ_SOUDE: nettoyage avec la solution soude en cours
- RIN_2 : 2éme rinçage en cours du cycle CIP
2 : la zone 2 affiche si le système exécute l’opération de nettoyage
de la cuve_soude ou non (RINC_CUVE)
3 : la zone 3 permet l’affichage le pourcentage d’ouverture de la
vanne modulante VM1 permettant l’accès du vapeur dans
l’échangeur.
4 : si la vanne V3 est ouverte alors son image symbolique devient :
(tout les actionneurs et les capteur TOR) représenté dans cette
synoptique subit les même change.
5 : la zone 5 indique la température en °C au niveau de TIC 2
6 : la zone 6 indique la température en °C au niveau de TIC 1 et de
la conductivité en ms au niveau de TC1.
89 Automatisation d’une centrale C.I.P
SEABG
La fenêtre « configuration
des variables » permet
l’accès aux fenêtres
suivantes :
F1 : si on appuie sur le
bouton F1 du pupitre de
commande OP27 alors on
accède à la fenêtre
précédente.
Figure 5.29 : Configuration des variables de la CIP F9 : si on appuie sur le
bouton F9 du pupitre de
Cette la fenêtre offre la possibilité de configurer les paramètres commande OP27 alors on
suivants selon les besoins de l’opérateur : revient à la fenêtre « la
fenêtre d’accueil»
- la température de soude désirée en °C.
- la concentration de soude désirée en ms. F10 : si on appuie sur le
- la durée du premier rinçage d’un cycle CIP en mn. bouton F10 du pupitre de
- la durée du second rinçage d’un cycle CIP en mn. commande OP27 alors on
- la durée du nettoyage avec la soude en mn. accède à la fenêtre
- la durée d’un cycle de nettoyage avec de l’eau seulement en « synoptique de la centrale
mn. de NEP »
- la durée d’un cycle de rinçage de la cuve soude en mn.
F11 : si on appuie sur le
Remarque : l’accès aux différentes zones de saisie se fait grâce bouton F11 du pupitre de
au curseur du pupitre et la validation de la valeur insérée se fait commande OP27 alors on
en appuyant sur le bouton ENTREE. revient à la fenêtre
« commande de processus »
90 Automatisation d’une centrale C.I.P
SEABG
La fenêtre « Commande de
processus » permet l’accès
aux fenêtres suivantes :
F1 : si on appuie sur le
bouton F1 du pupitre de
commande OP27 alors on
accède à la fenêtre
précédente.
F9 : si on appuie sur le
bouton F9 du pupitre de
Figure 5.30: Commande de PROCESSUS
commande OP27 alors on
Cette la fenêtre permet à l’opérateur de donner ces ordres à la revient à la fenêtre « la
partie opérative et de vérifier la disponibilité de la soutireuse, du fenêtre d’accueil »
vapeur et de l’eau.
F10 : si on appuie sur le
- ORDRE_REALISATION_CYCLE : cette ordre lance une bouton F10 du pupitre de
requête qui test la disponibilité de l’eau. commande OP27 alors on
- ORDRE_CYCLE_CIP : ordre d’effectuer un cycle de accède à la fenêtre
nettoyage en place (rinçage- nettoyage avec la soude- « synoptique de la centrale
rinçage) de NEP »
- ORDRE_PREP_TANK_SOUDE : ordre de préparation du
tank soude caustique
- ORDRE_RINC : ordre d’effectuer un de rinçage de la
soutireuse.
- ORDRE_RINC_CUVE_SOUDE : ordre de rinçage de la
cuve_soude.
- CUVE_SOUDE_PRETE : la cuve soude est prêt
(température et concentration de la soude sont favorable
pour le nettoyage)
- SOUTIREUSE_PRETE : soutireuse prête pour le nettoyage.
- VAPEUR_DISPONIBLE : vapeur disponible
- EAU_DISPONIBLE : eau disponible
91 Automatisation d’une centrale C.I.P
SEABG
La fenêtre « Etat du
processus » permet l’accès
aux fenêtres suivantes :
F1 : si on appuie sur le
bouton F1 du pupitre de
commande OP27 alors on
accède à la fenêtre
précédente.
F9 : si on appuie sur le
bouton F9 du pupitre de
Figure5.31 : Etat du processus commande OP27 alors on
la fenêtre « Etat du processus » offre à l’opérateur d’une part, revient à la fenêtre « Image
la possibilité de forcer les différents actionneurs lorsque le système d’accueil »
est en mode manuel et d’autre part d’avoir un diagnostic des
différentes alarmes.
1- la zone 1 indique si l’une des trois alarmes suivantes est actives:
ALL_SOUT : alarme active si la soutireuse devient
indisponible pendant son nettoyage
ALL_VAP : alarme active s’il n’y a pas de vapeur pendant
le chauffage de la soude.
ALL_EAU : alarme active s’il n’y a une coupure d’eau.
2- la zone 2 permet à l’opérateur de choisir l’actionneur à forcer
3- la zone 3 est une zone de visualisation de l’état des actionneurs.
4- la zone 4indique si l’une des alarmes suivantes est active :
ALL_CUVE : alarme au niveau de la cuve_soude
ALL_P1 : alarme au niveau de la pompe P1
ALL_P2 : alarme au niveau de la pompe P2
92 Automatisation d’une centrale C.I.P
SEABG
5- la zone 5 visualise l’état de marche ou d’arrêt du système :
marche_auto : mode de marche automatique
marche_manu : mode de marche manuelle
alarme : alarme déclenché
Conclusion
Dans ce chapitre, nous avons développé une interface de communication entre
l’opérateur et la machine en utilisant l’outil Protool de SIMATIC Manager. Cette interface est
implémentée sur le pupitre de commande OP27.
93 Automatisation d’une centrale C.I.P
SEABG
Conclusion générale
Le nettoyage est un des principaux garants de la qualité du produit fabriqué. Il est donc
primordial pour l’entreprise d’optimiser les procédés de nettoyage tant dans leur conception
que dans leur application. Ainsi, Le nettoyage doit être considéré comme une étape de
fabrication à part entière et non plus comme un « simple lavage ». L’automatisation de cette
étape permettra non seulement d’optimiser son temps d’exécution mais aussi de réduire le
contact de l’opérateur avec les produits toxiques telle que la soude.
Dans le cadre de ce projet nous nous sommes intéressés à l’automatisation d’une
centrale de nettoyage en place qui offre la possibilité de recyclage du détergent après son
utilisation et par la suite la réduction du coût de nettoyage et la diminution de la quantité des
déchets toxiques rejetés dans la nature.
Nous avons développé une application offrant à l’opérateur des accessibilités de
contrôle et de supervision du cycle de nettoyage en place. Cette application a été programmée
par l’outil « STEP7 » de « SIMATIC » sur un automate programmable Siemens (CPU-
314.V2.1). Ensuite, nous avons crée une interface permettant la communication entre le
processus de nettoyage et l’opérateur, en utilisant l’outil « Pro Tool » de « SIMATIC » et un
pupitre de commande SIMATIC OP27.
L’application programmée sur l’automate est pour l’instant fonctionnelle. Toutefois sa
validation finale nécessite plus de temps d’expérimentation après la réalisation de
l’installation physique de la centrale de nettoyage en place décrite dans ce rapport.
L’installation de nettoyage en place conçue peut être améliorée en ajoutant un réservoir
de mélange d’acide et un autre pour les désinfectants similaires à celui de la soude caustique.
Des modifications seront donc indispensables dans notre programme.
Nous notons que quelques insuffisances restent à améliorer, en l’occurrence :
L’archivage automatique des alarmes et des arrêt d’urgence ce qui assurera une
meilleure fiabilité et rapidité.
La limitation des droits d’accès aux paramètres de configuration de la CIP dans le
pupitre de commande par l’ajout des mots de passe.
94 Automatisation d’une centrale C.I.P
SEABG
Pour clôturer ce rapport, il est indispensable de signaler les côtés bénéfiques de ce
projet. Sur le plan théorique, il nous a permis d’approfondir nos connaissances sur les
procédures de nettoyage en place des processus de production. Sur le plan pratique, il nous a
permis de cerner les diverses problématiques liées à la conception des installations
industrielles.
Il nous a été aussi une occasion de mettre en œuvre nos connaissances acquises au cours
de nos années d’études notamment en automatique et en automate programmable industriel
(API). L’apprentissage des outils aussi répandu que « STEP7 » et « PRO TOOL » revêt un
intérêt particulier puisque nous pourrons être amenés à les rencontrer dans notre vie
professionnelle future.
95 Automatisation d’une centrale C.I.P
SEABG
Références Bibliographiques
Ouvrages:
[1] F. Laban, C. Bouloumie, M. Bousquet-Bedu, J. Cavil, A. Dumant, F. Durand,
Validation des procédés de nettoyage, S.T.P Pharma Pratiques 2000, 10 (5) 270-
271.
[2] Dairy processing handbook. Nn.63174 en1. 1995 Tetra Pak Processing systems
AB, Lund, Sweden.
[3] Technologie Génie Chimique (ANGLARET - KAZMIERCZAK) Tome 1
[4] Manuel de thermique, B. EYGLUNENT, HERMES (97)
Adresses Web:
[5] Destin A. Leblanc, Cleaning Validation Technologies, Cleaning Memos:
http://www.cleaningvalidation/cleaningmemos, 25 décembre 2005.
[6] Modélisation d’un échangeur thermique. Pr. I. Zambettakis :
http://www.laas.fr/Documents/rapport-activites2002.pdf
[7] GEMMA (Guide d’Etude des Modes Marches/Arrêt)
http://www.gemma/scr , 11 novembre 2005
96 Automatisation d’une centrale C.I.P
SEABG
Annexes
97 Automatisation d’une centrale C.I.P
SEABG
Annexe 1 : Modélisation de l’échangeur de chaleur (d’après Pr. I.
Zambettakis)
1. Détermination des variables d’entrée et de sortie du système :
Entrée : S section d’alimentation
Sorties : θv température du vapeur et température θs mesurée par θm
2. Les lois physiques :
Une description du fonctionnement de l’échangeur thermique montre l’intervention de
trois lois physiques à savoir la lois de transfert de chaleur à travers une paroi, la lois de la
quantité de chaleur apporté par un fluide dans un réservoir par unité de temps et le bilan
énergétique (variation de la quantité de chaleur par seconde).
On pose pour cela les notions suivantes :
R : résistance thermique moyenne globale de l’échangeur thermique, exprimée en W.m-2.K-1
C : capacité calorifique, exprimée en J / °C
C = m.c ; c: capacité calorifique massique exprimée en J.kg-1 /°C
ρ: masse volumique, exprimé en kg/m3
(a) transfert de chaleur a travers une paroi :
Remarque : ici R est la résistance moyenne de l’échangeur tout entier. Pour modéliser
plus finement il faudrait exprimer le transfert vapeur / eau localement ; en toute rigueur
c’est :
Ou θchaude θfroide sont les températures de la vapeur et de l’eau le long du tube
98 Automatisation d’une centrale C.I.P
SEABG
(b) quantité de chaleur par unité de temps apportée par un fluide dans
un réservoir (entrant-sortant) :
(c) bilan énergétique :
Variation de la quantité de chaleur par seconde
4.3.3. Les équations d’évolution des températures de sortie pour
la vapeur θv et pour l’eau θs
Pour la vapeur : température de sortie θv
(1)
Pour l’eau: température de sortie θs mesurée par θm
(2)
3. Linéarisation des équations et déduction des équations
différentielles :
Le terme non linéaire est Sθv dans l’équation d’évolution de θv (1) alors que
l’équation (2) relative à θs est linéaire. Le terme non linéaire étant un produit, le système
est dit bilinéaire (c.à.d à non linéarités de type produit uniquement).
99 Automatisation d’une centrale C.I.P
SEABG
Autour du point de fonctionnement (ouverture vanne S0, θv0, θs0), la variation du
terme peut être approchée suivant l’approximation de Taylor au premier degré par :
La différence membre à membre entre l’équation de θv1 et son écriture au point de
fonctionnement (S0, θv0, θs0) conduit alors à :
Ou encore, sachant que (dθv/dt)=0 puisque θv0 est une constante :
(3)
De même pour l’eau, l’équation 2 s’écrit, au point de fonctionnement :
(4)
Et la différence membre à membre de l’équation (2) avec (4) fournit pareillement
l’équation au variable d’écart correspondante :
(5)
En utilisant ici aussi le fait que (dθs0 / dt)=0 puisque θS0 est une constante.
100 Automatisation d’une centrale C.I.P
SEABG
Les deux équations (3) et (5) caractérisent le système linéaire tangent au système (1,2)
au point de fonctionnement (S0, θv0, θs0) ; c’est un système de deux équations différentielles
linéaires d’ordre1 qui peut simplement s’écrire :
(6)
Les paramètres a, b, c, f et g s’exprimant, en fonction des paramètres donnés, par :
(7)
4. Les transferts (δθS / δS) et (δθm / δS) entre la variation δS = S - S0 et
les variation δθS = θS - θS0 ou δθm = θm - θm0
Le transfert (δθS / δS) s’obtient en éliminant δθS dans (6), ce qui nécessite de dérivé une
fois la deuxième équation de (6) :
(8)
En posant (d / dt) = 0 (transformé de Laplace), l’opérateur de dérivation, on obtient :
101 Automatisation d’une centrale C.I.P
SEABG
(9)
Puis pour le transfert (δθm / δS) il faut traduire le fait que la mesure θm de θs est effectué
par un capteur (PT100) qui présente uniquement un retard tr, soit :
Le retard s’exprimant en calcul opérationnel par l’opérateur de retard e-tr p, il vient :
Donc :
102 Automatisation d’une centrale C.I.P
SEABG
Annexe2 : caractéristique physique de la vapeur saturée
103 Automatisation d’une centrale C.I.P
SEABG
Annexe 3 : Chaleurs massiques ou molaires
En génie chimique on utilise surtout la chaleur massique cp (molaire Cp) à pression
constante qui représente la quantité de chaleur nécessaire pour élever de 1°C une unité de
masse (une mole) d'un corps pur sous une pression constante. Elles s'expriment en J.kg-1.K-1
(J.mol-1.K-1) dans le système légal. Plus couramment on trouve les unités kJ.kg-1.K-1
(kJ.mol-1.K-1).
L'utilisation des calories ou kilocalories est encore rencontrée dans des tables ou des
abaques anciens. On a donc par exemple les unités suivantes: cal.kg-1.K-1 et kcal.mol-1.K-1.
On rappelle l'équivalence: 1 cal = 4,18 J.
La chaleur massique dépend de la température et de l'état physique du corps pur. La
variation suivant la température est souvent négligée; on utilise alors des valeurs moyennes
valables sur des intervalles de température.
Exemple de l'eau:
- Eau liq (20°C) 4,18 kJ.kg-1.K-1
- Eau liq (80°C) 4,30 kJ.kg-1.K-1
- Eau vap (120°C) 2,01 kJ.kg-1.K-1
- Eau vap (200°C) 1,98 kJ.kg-1.K-1
104 Automatisation d’une centrale C.I.P
SEABG
Annexe 4 : Conductivité thermique d'un milieu
Pour un milieu donné la conductivité thermique λ dépend de la température et de l'état de
surface pour les solides. On utilise souvent une valeur moyenne qu'on juge acceptable sur un
intervalle de températures.
On donne des exemples de conductivité en W.m-1.K-1à la température ambiante:
• solides bons conducteurs:
- argent: 408 ; cuivre: 386 ; aluminium: 229
- graphite: 150 ; acier ordinaire: 42 ; inox: 16
• solides mauvais conducteurs et isolants:
- Verre: 0,75 ; polystyrène: 0,65 ; PVC: 0,16
- Amiante: 0,16 l ; aine de verre: 0,04
• fluides:
- air: 0,022 ; eau: 0,58 ; éthanol: 0,18 ; huiles: 0,14
On retiendra que généralement la conductivité des solides est plus élevée que celle des
liquides. La conductivité des gaz est encore plus faible. Le vide est d'ailleurs un isolant parfait
car il n'y a pas de molécules pour la conduction.
105 Automatisation d’une centrale C.I.P
SEABG
Annexe 5 : Echangeur Tubulaire Horizontale
L’échangeur thermique disponible actuellement dans la société est un échangeur
tubulaire horizontale dont la structure mécanique est constitué de deux parties:
• Un faisceau tubulaire de deux à plusieurs centaines de tubes soudés à leur extrémité
sur une plaque.
• Une calandre (tube cylindrique de gros diamètre) dans laquelle est placé le faisceau
tubulaire. Aux extrémités sont fixées les calottes qui servent de collecteur pour le fluide
circulant dans les tubes.
Il existe plusieurs solutions pour favoriser le transfert thermique:
• Chicanage de la calandre: on place des cloisonnements sur le trajet du fluide pour
éviter qu'il ne suive un chemin préférentiel. La turbulence créée améliore également le
transfert.
• Cloisonnement pour la circulation dans les tubes ou dans la calandre: on obtient ainsi
un échangeurs multi passes côté tubes ou côté calandre. On augmente ainsi les longueurs de
circulation (donc la surface d'échange) et on peut ainsi réaliser un échangeur avec un "double"
contre-courant.
Cet échangeur n’est pas très intéressant pour les échanges thermiques entre deux
liquides (Annexe 4). Il n'est donc pas rentable de vouloir augmenter les vitesses de circulation
à l'extérieur des tubes où la vitesse, à débit égal, est beaucoup plus faible qu'à l'intérieur. La
vitesse à l'extérieur des tubes limite donc toujours la valeur du coefficient de transfert global.
Par contre ces échangeurs prennent tout leur intérêt pour des échanges vapeur – liquide,
c’est la raison pour laquelle on a choisit la vapeur d’eau comme fluide de chauffage. Le
coefficient de transfert par convection vapeur - paroi lors d'une condensation est plus élevé
que dans le cas d'un transfert liquide - paroi où il n'y a pas de changement de phase. Il ne
dépend pas directement de la vitesse de la vapeur: on peut donc faire circuler sans
inconvénient la vapeur autour des tubes et bénéficier d'une vitesse élevée du liquide à
l'intérieur des tubes.
106 Automatisation d’une centrale C.I.P
SEABG
Les échangeurs tubulaires horizontaux sont utilisés comme condenseurs et la vapeur
circule à l’extérieur des tubes:
Dans les échangeurs horizontaux (en fait très légèrement inclinés pour faciliter
l'écoulement du condensât) le film liquide qui se forme se rassemble en gouttes qui tombent
finalement sur la partie basse de la calandre en présence d'un excès de vapeur. Le liquide sort
alors du condenseur sans avoir d'autre contact avec une paroi froide. On obtient donc un
condensât non refroidi.
Les échangeurs tubulaires sont construits en acier, en inox, en graphite ... Ils sont les
plus répandus. Ils présentent néanmoins quelques restrictions d'utilisation:
• Il n’est pas préférable de faire circuler un fluide risquant de provoquer un
encrassement à l'intérieur des tubes; en effet après démontage des calottes le nettoyage est
beaucoup plus facile.
• Les fluides corrosifs doivent passer à l'intérieur des tubes pour éviter le surcoût d'un
matériau résistant à la fois pour les tubes et la calandre.
Les dépôts sont fréquents sur les parois de l’échangeur:
• Boues: causées par des suspensions insolubles circulant à faible vitesse. Si les
particules des suspensions sont indésirables, il faut filtrer avant l'entrée dans l'échangeur.
• Rouille: causée par la corrosion. L'utilisation d'acier inoxydable permet d'y remédier.
• Tartre: dépôt dur et compact causé par la précipitation de sels à solubilité inverse
(sulfate de calcium, carbonate de sodium...) sur des surfaces chaudes. On évite donc de faire
circuler l'eau à des températures supérieures à 40 °C et on augmente la vitesse de circulation.
Le traitement de l'eau sur des résines échangeuses d'ions par déminéralisation est également
possible.
On utilise le coefficient d'encrassement α pour quantifier l'influence des dépôts. Si on
note K et K' respectivement les coefficients de transfert thermique globaux sans encrassement
et avec encrassement, on a la relation suivante:
107 Automatisation d’une centrale C.I.P
SEABG
Par exemple dans le cas d'une condensation de vapeur organique par de l'eau (échangeur
tubulaire en acier), on peut assister à une diminution de l'ordre de 30 % du coefficient de
transfert global. Pour de l'eau le coefficient d'encrassement est de l'ordre de 2000 W.m-2.K-1.
Remarque: la présence de gaz incondensables entraîne également une diminution de
coefficient global de transfert thermique lors d'une condensation. Ces gaz jouent le même rôle
qu'un isolant.
108 Automatisation d’une centrale C.I.P
SEABG
Annexe 6 : transfert dans un échangeur tubulaire
On examine deux tubes cylindriques concentriques de rayons ri et re et de longueur L.
Un liquide chaud circule dans le tube intérieur (température de mélange θi) et un liquide froid
circule dans l’espace annulaire (température de mélange θe).
Le transfert global de chaleur du liquide chaud au liquide froid s’effectue en trois phases
de transfert:
• Convection dans le tube intérieur (hi) du liquide chaud à la paroi intérieur du tube
intérieur
• Conduction dans la paroi du tube intérieur (λ)
• Convection dans l’espace annulaire de la paroi extérieure du tube intérieur au liquide
froid (he).
En utilisant la propriété d’additivité des résistances thermiques en série entre les deux
liquides, on pourra en déduire le flux échangé entre les deux liquides.
Si on cherche le coefficient global de transfert défini par rapport à la surface extérieure du
tube intérieure Ke, on trouve l’expression suivante:
109 Automatisation d’une centrale C.I.P
SEABG
On remarque que ce coefficient est totalement indépendant de la surface des tubes et
qu‘il caractérise le transfert. K caractérise la qualité intrinsèque de l'échange: il dépend de la
nature des deux fluides, de leur débit, de leur température et des caractéristiques géométriques
de l'échangeur.
Il est bien entendu possible d’utiliser l’approximation arithmétique pour le terme de
conduction (si la condition d’approximation est vérifiée). De même le coefficient peut être
défini par rapport à la surface intérieure du tube intérieur ou par rapport à une surface
moyenne (définie par un rayon moyen): on obtient alors des expressions différentes.
110 Automatisation d’une centrale C.I.P
SEABG
Annexe 7 : Pompe doseuse
Pompes péristaltiques DELASCO : Le principe du pompage péristaltique repose sur
la capacité que possède un tube en matériau souple (type élastomère) à se déformer puis à
reprendre sa forme initiale après avoir été écrasé, ici, par un galet. Le débit obtenu varie en
fonction du diamètre du tube et de la vitesse de rotation.
Figure : Pompe péristaltiques DELASCO
1. Aspiration (1er tiers de tour) : Sous l'action du premier galet, le tube est comprimé
et se referme de façon occlusive. A l'arrière du galet, le retour du tube à sa forme
initiale génère un vide qui crée l'aspiration du produit.
2. Transfert (2ème tiers de tour) : Le volume de produit compris entre le premier et le
deuxième galet est transféré à l'intérieur du tube, de la partie aspiration à la partie
refoulement de la pompe.
3. Refoulement (3ème tiers de tour) : Sous la pression du second galet, le produit est
refoulé dans la canalisation.
Figure : Fonctionnement d’une pompe doseuse
111 Automatisation d’une centrale C.I.P
SEABG
Avantages techniques
- Auto-amorçage : il s'effectue sans aide et à sec. La mise en charge n'est nécessaire que
pour produits très épais au delà de 10 000 centipoises.
- Fonctionnement à sec : ceci est possible de façon épisodique sans risque pour le
matériel. Le liquide pompé servant en fait de refroidisseur et de lubrifiant interne, un
fonctionnement à sec prolongé accélère toutefois l'usure du tube.
- Pas d'étanchéité par presse-étoupe ou garnitures mécaniques : aucune fuite n'est
possible le long de l'arbre d'entraînement puisqu'il n'est pas en contact avec le fluide.
- Produits corrosifs : le tube seul est en contact avec le fluide. Ceci élimine tous les
problèmes de corrosion habituellement rencontrés avec des produits acides
(chlorhydrique, sulfurique, nitrique, ...) ou basiques (soude, détergents,...).
- Produits abrasifs : l'élastomère du tube résiste mieux à l'abrasion qu'une surface
métallique. De plus Io possibilité de tourner à faible vitesse réduit également le
phénomène d'abrasion que l'on peut rencontrer avec des produits chargés.
- Réversibilité : la construction symétrique de la pompe la rend parfaitement réversible
en agissant simplement sur le sens de rotation. Les caractéristiques et les performances
maximales de la pompe sont obtenues dans les deux sens de rotation.
- Entretien : la seule pièce d'usure étant le tube, l'entretien se limite à un graissage
périodique et à son remplacement si nécessaire, opération rapide qui s'effectue sans
démonter la pompe.
Caractéristiques suivant séries
- Débit maximal : 200 l/h (série PMA), 18 m3/h (série Z), 68 m3/h40 m3/h (série DSC),
20 m3/h (série DL)
- Pression maximale : 2 bar (série Z), 15 bar (séries DSC et DL)
- Température maximale : 150 °C
- Auto-amorçable
- Réversible
Application :
Agro-alimentaire : - Dosage soude et acide nitrique (CIP).
- Dosage d’arômes, colorants….
112 Automatisation d’une centrale C.I.P
SEABG
Sommaire
INTRODUCTION GENERALE ............................................................................................ 1
PRESENTATION DE LA SOCIETE SEABG ..................................................................... 3
CHAPITRE I : NETTOYAGE EN PLACE .......................................................................... 4
INTRODUCTION .................................................................................................................... 5
1.1. LE NETTOYAGE EN PLACE (NEP) ................................................................................... 5
1.1.1. Qu’est ce qu’une NEP ? ......................................................................................... 5
1.1.2. Pourquoi le nettoyage ?.......................................................................................... 5
1.1.3. Mécanisme de nettoyage ........................................................................................ 6
1.1.4. Paramétrage de la procédure de nettoyage.......................................................... 7
1.1.5. Détergents et nettoyage .......................................................................................... 9
1.1.5.1 Composition des détergents ........................................................................... 10
1.1.5.2. Classification des détergents ........................................................................ 10
1.1.5.2.1. Les détergents alcalins ........................................................................... 10
1.1.5.2.2. Les détergents acides .............................................................................. 11
1.1.5.3. Choix d’un détergent .................................................................................... 11
1.1.5.4. Nettoyage automatique ................................................................................ 12
1.1.6. Circuits de NEP .................................................................................................... 13
1.1.7. Matériaux compatibles et conception du système ............................................. 13
1.2. DESCRIPTION DE L’INSTALLATION DE NETTOYAGE NEP ............................................ 14
1.2.1. LES CINQ ETAPES DU SYSTEME NEP ......................................................................... 15
1.2.2. Les objets à nettoyer ............................................................................................ 15
1.2.3. L’installation CIP actuelle ................................................................................... 16
1.2.4. L’installation CIP prévue .................................................................................... 17
1.3. CONCEPTION DE L’INSTALLATION DE N.E.P ............................................................... 19
1.3.1. Présentation de l’installation ............................................................................... 19
1.3.2. Conception d'une solution d'automatisation ..................................................... 21
1.3.2.1. Subdivision du processus .............................................................................. 21
1.3.2.2. Description des différentes zones fonctionnelles ........................................ 23
1.3.3. Définition des exigences en matière de sécurité ................................................. 29
113 Automatisation d’une centrale C.I.P
SEABG
CHAPITRE II : CONCEPTION ET SPECIFICATION DE L’AUTOMATISATION DU
PROCESSUS CIP .................................................................................................................. 31
INTRODUCTION : .................................................................................................................. 32
2.1. CONCEPTION DE L’AUTOMATISATION .......................................................................... 32
2.1.1. Grafcet fonctionnel ............................................................................................... 33
2.1.1.1. Identification des entrées-sorties du Grafcet 1 ........................................... 33
2.1.1.2. Grafcets .......................................................................................................... 34
2.1.1.2.1. Grafcet principal .................................................................................... 34
2.1.1.2.2. Macro-étape cycle_CIP .......................................................................... 37
2.1.2. Grafcet opérationnel ............................................................................................ 38
2.1.2.1. Identification des entrées / sorties ................................................................ 38
2.1.2.2. Macro-étape rinçage_cuve_soude :.............................................................. 40
2.1.2.3. Macro-étape préparation_cuve_soude : ...................................................... 40
2.1.2.4. Macro-étape rinçage_soutireuse : ................................................................ 44
2.1.2.5. Macro-étape injection_soude_caustique : ................................................... 44
2.2. ETUDE DU REGULATEUR PID DE L’ECHANGEUR ......................................................... 48
2.2.1. Fonction de transfert de l’échangeur : ............................................................... 49
2.2.2. Schéma fonctionnel .............................................................................................. 50
2.2.3. Application numérique ........................................................................................ 51
2.2.4. Détermination des paramètres du régulateur : ................................................. 52
2.3. CONCEPTION DU GRAPHE GEMMA ............................................................................ 58
2.3.1. Concepts de base................................................................................................... 58
2.3.2. Construction du graphe GEMMA de la centrale de nettoyage en place......... 60
CONCLUSION ........................................................................................................................ 62
CHAPITRE III : IMPLEMENTATION ET VALIDATION DE L’AUTOMATISATION
DE LA CENTRALE CIP ....................................................................................................... 63
INTRODUCTION .................................................................................................................... 64
3.1. API ET ENVIRONNEMENT DE DEVELOPPEMENT ........................................................... 64
3.1.1 Automate programmable industriel (API) ......................................................... 64
3.1.2. Langage de programmation pour SIMATIC .................................................... 66
3.2. IMPLEMENTATION DE L’APPLICATION ......................................................................... 67
3.2.1. Configuration matérielle : ................................................................................... 67
3.2.1.1. Affectation des entrées numériques ............................................................. 67
114 Automatisation d’une centrale C.I.P
SEABG
3.2.1.2. Affectation des sorties numériques .............................................................. 68
3.2.1.3. Affectation des entrées analogiques ............................................................. 69
3.2.1.4. Identification des sorties analogiques .......................................................... 69
3.2.2. Implémentation des fonctions de l’application .................................................. 70
3.2.2.1. Bloc d’organisation (OB1) ............................................................................ 70
3.2.2.2. La fonction (FC1) .......................................................................................... 72
3.2.2.3. La fonction (FC2) .......................................................................................... 74
3.2.2.4. La fonction (FC4) .......................................................................................... 75
3.2.2.5. La fonction (FC3) .......................................................................................... 75
3.2.2.6. La fonction (FC11) ........................................................................................ 76
3.2.2.7. La fonction (FC5) .......................................................................................... 77
3.2.2.8. La fonction (FC6) .......................................................................................... 77
3.2.2.9. Le bloc de donnée (DB2) ............................................................................... 79
3.2.2.10. Le bloc d’organisation (OB122) ................................................................. 80
3.2.3. Simulation du programme avec le simulateur S7-PLCSIM............................. 80
3.2.4. Simulation avec le CPU........................................................................................ 81
CONCLUSION :...................................................................................................................... 83
CHAPITRE IV : CONCEPTION ET IMPLEMENTATION D’UNE APPLICATION
PUPITRE ................................................................................................................................ 84
INTRODUCTION .................................................................................................................... 85
4.1. CONCEPTION DE L’APPLICATION PUPITRE ................................................................... 85
4.1.1. Procédure de communication entre le pupitre de commande et le processus 85
4.1.2. Modèle de spécification ........................................................................................ 86
4.2. IMPLEMENTATION DE L’APPLICATION PUPITRE .......................................................... 86
4.2.1. Présentation du logiciel ProTool ......................................................................... 86
4.2.2. Implémentation d’une application pupitre ........................................................ 87
CONCLUSION ........................................................................................................................ 93
CONCLUSIONS GENERALES ........................................................................................... 94
REFERENCES BIBLIOGRAPHIQUES ............................................................................. 96
ANNEXES ............................................................................................................................... 97
115 Automatisation d’une centrale C.I.P
SEABG
Liste des figures
FIGURE 1: MECANISME D'ELIMINATION DES SOUILLURES [1] .................................................... 7
FIGURE 2:CERCLE DE SINNER [2] .......................................................................................... 8
FIGURE 3: COMPOSITION DES DETERGENTS [1]....................................................................... 10
FIGURE 4: CHOIX DU DETERGENT [2]............................................................................. 12
FIGURE 5: EXEMPLE DE CUL DE SAC [6] ........................................................ 14
FIGURE 6: SYSTEME SIMPLE (CIRCUIT OUVERT) [6] .............................................. 16
FIGURE 7: SYSTEME A RECYCLAGE DE DETERGENT [6] .......................................... 18
FIGURE 8: SCHEMA DE LA CENTRALE CIP ................................................................................. 20
FIGURE 9: ETAPE DE CONCEPTION D'UNE SOLUTION AUTOMATISE ............................................. 21
FIGURE 10: PUPITRE DE COMMANDE ......................................................................................... 30
FIGURE 11: NOMMAGE SYMBOLIQUE DES ENTREES/SORTIES ..................................................... 33
FIGURE 12: MODELISATION DE L'ECHANGEUR ........................................................................... 48
FIGURE 13: VERIFICATION DU CAHIER DE CHARGE .................................................................... 57
FIGURE 14: GUIDE GRAPHIQUE GEMMA .................................................................................... 59
FIGURE 15: GEMMA DE LA CENTRALE DE NETTOYAGE EN PLACE .............................................. 61
FIGURE 16: ORGANISATION MODULAIRE DE L'API .................................................................... 64
FIGURE 17: STATION ET300 ...................................................................................................... 66
FIGURE 18: EMPLACEMENT DES MODULES ................................................................................ 67
FIGURE 19: PROPRIETES DES ENTREES ANALOGIQUES ............................................................... 69
FIGURE 20: CARACTERISTIQUES DES SORTIES ANALOGIQUES .................................................... 70
FIGURE 21: STRUCTURE DE PROGRAMME UTILISATEUR S7 DE L'APPLICATION........................... 70
FIGURE 22: APPELLE DES FONCTIONS FC1 ET FC3 .................................................................... 71
FIGURE 23: AFFECTATION DES MNEMONIQUES DES ENTREES LOGIQUES .................................... 72
FIGURE 24: CONVERSION DE LA VALEUR NUMERIQUE DU FORMAT ENTIER AU FORMAT REEL ... 73
FIGURE 25: NORMALISATION DE LA VALEUR DE TEMPERATURE DETECTEE ............................... 73
FIGURE 26: COMPARAISON DE LA CONSIGNE AVEC LA MESURE ................................................. 74
FIGURE 27: SORTIE CPU ........................................................................................................... 74
FIGURE 28: CONDITION DE MARCHE AUTO/MANU................................................................. 75
FIGURE 29: MISE A UN DE L'ALARME ......................................................................................... 76
FIGURE 30: TRANSITIONS ET ETAPES DE RINÇAGE ..................................................................... 76
FIGURE 31: MISE EN MARCHE DE LA POMPE P1 ......................................................................... 77
FIGURE 32: REGULATEUR PID DE TEMPERATURE...................................................................... 78
116 Automatisation d’une centrale C.I.P
SEABG
FIGURE 33: BLOC D'INSTANCE ASSOCIE AU REGULATEUR DE TEMPERATURE ............................ 79
FIGURE 34: BLOC DE DONNEES DB2 ......................................................................................... 79
FIGURE 35: FENETRE DU SIMULATEUR S7-PLCSIM .................................................................. 80
FIGURE 36: EXEMPLE 1 -MODE_AUTO - .................................................................................... 81
FIGURE 37: EXEMPLE 2 -ENCLENCHEMENT DU TEMPORISATEUR T100 - ................................... 82
FIGURE 38: EXEMPLE 3 -RINÇAGE DU CUVE_SOUDE ................................................................. 82
FIGURE 39: EXEMPLE 4 -CONDITION DE MARCHE DE LA VANNE V4 – ....................................... 83
FIGURE 40: COMMUNICATIONS PUPITRE- AUTOMATE- PROCESSUS ............................................ 85
FIGURE 42: FENETRE PROJET DU PROTOOL ............................................................................... 87
117 Automatisation d’une centrale C.I.P
SEABG
Liste des tableaux
TABLEAU I: SUBDIVISION DU PROCESSUS .................................................................................. 22
TABLEAU II: MOTEUR DE LA POMPE DOSEUSE ........................................................................... 24
TABLEAU III: VANNES D'ALIMENTATION D'EAU ........................................................................ 25
TABLEAU IV: LES VANNES DU CIRCUIT DU DETERGENT ............................................................ 26
TABLEAU V: POMPE CIP_PRESSION.......................................................................................... 28
TABLEAU VI: VANNE MODULANTE VM1 .................................................................................. 29
TABLEAU VII: LES ENTREES SORTIE DU GRAFCET PRINCIPALE ................................................. 34
TABLEAU VIII: IDENTIFICATION DES ENTREES .......................................................................... 38
TABLEAU IX: IDENTIFICATION DES SORTIES .............................................................................. 38
TABLEAU X: CARACTERISTIQUE PHYSIQUE DU FLUIDE CHAUFFANT ET DU FLUIDE CHAUFFE .... 51
TABLEAU XI: SPECIFICATION DU MATERIEL .............................................................................. 65
TABLEAU XII: AFFECTATION DES ENTREES LOGIQUES .............................................................. 68
TABLEAU XIII: AFFECTATION DES SORTIES LOGIQUES .............................................................. 68
TABLEAU XIV: AFFECTATION DES ENTREES ANALOGIQUES ...................................................... 69
TABLEAU XV: AFFECTATION DES SORTIES ANALOGIQUES ........................................................ 69
TABLEAU XVI: LES VARIABLES TEMPORAIRES DE L'OB1 ......................................................... 71
TABLEAU XVII: DESCRIPTION DES DIFFERENTES FENETRES DE L'APPLICATION PUPITRE ........... 88
118 Automatisation d’une centrale C.I.P
SEABG
Liste des Grafcets
GRAFCET 1: GRAFCET FONCTIONNEL DU SYSTEME DE NETTOYAGE EN PLACE (CAHIER DE
CHARGE)............................................................................................................................ 36
GRAFCET 2: MACRO-ETAPE M9 (CYCLE_CIP) .......................................................................... 37
GRAFCET 3: MACRO-ETAPE M2 (RINÇAGE_CUVE_SOUDE)........................................................ 41
GRAFCET 4: MACRO-ETAPE M5 (PREPARATION_CUVE _SOUDE) 1/2.................................... 42
GRAFCET 5: MACRO-ETAPE M5 (PREPARATION_CUVE _SOUDE) 2/2.................................... 43
GRAFCET 6: MACRO-ETAPE M8 (RINÇAGE_SOUTIREUSE) 1/2 ................................................ 45
GRAFCET 7: MACRO-ETAPE M8 (RINÇAGE_SOUTIREUSE) 1/2 ................................................ 46
GRAFCET 8: MACRO-ETAPE M9 (INJEC_SOUDE_CAUSTIQUE) .................................................... 47
119 Automatisation d’une centrale C.I.P
S-ar putea să vă placă și
- HACCP SardinaDocument25 paginiHACCP SardinaKhaoula SoufianiÎncă nu există evaluări
- HACCP Sardina 1234Document26 paginiHACCP Sardina 1234Khaoula SoufianiÎncă nu există evaluări
- Commission du Codex Alimentarius: Manuel de Procédure Vingt-sixième editionDe la EverandCommission du Codex Alimentarius: Manuel de Procédure Vingt-sixième editionEvaluare: 5 din 5 stele5/5 (1)
- Travaux Diriges SMSDA QSE 2 UD 2019Document3 paginiTravaux Diriges SMSDA QSE 2 UD 2019valerieÎncă nu există evaluări
- Contro Le Des BioproduitsDocument20 paginiContro Le Des Bioproduitsolfa100% (1)
- Power PointDocument18 paginiPower Pointinscripemma100% (1)
- Gestion Des Rejets Dans L'industrie Laitière: Complexe de Formation Agroalimentaire Et Plasturgie-CasablancaDocument36 paginiGestion Des Rejets Dans L'industrie Laitière: Complexe de Formation Agroalimentaire Et Plasturgie-CasablancaSuma MulimÎncă nu există evaluări
- Les Référentiels Qualité Et Sécurité Des Aliments Pour Les IAADocument20 paginiLes Référentiels Qualité Et Sécurité Des Aliments Pour Les IAAcedric amougouÎncă nu există evaluări
- Cours PDFDocument69 paginiCours PDFTIEBE SERGESÎncă nu există evaluări
- HaccpDocument12 paginiHaccpfatiha elgharbaouiÎncă nu există evaluări
- TP N° 02 Méthode de Détermination de La Teneur en Matière Grasse Totale de La Viande Et Des Produits de La ViandeDocument3 paginiTP N° 02 Méthode de Détermination de La Teneur en Matière Grasse Totale de La Viande Et Des Produits de La ViandeMohamed AlÎncă nu există evaluări
- La Mise en Place Du Systeme HA - ABETTI Soumia - 1019Document47 paginiLa Mise en Place Du Systeme HA - ABETTI Soumia - 1019dede12Încă nu există evaluări
- L'extraction Par PressionDocument15 paginiL'extraction Par PressionGedion DouaÎncă nu există evaluări
- CG Technologie Des Procédés Industriels Pour Les Jus de Fruit GIA PDFDocument16 paginiCG Technologie Des Procédés Industriels Pour Les Jus de Fruit GIA PDFfourat.zarkounaÎncă nu există evaluări
- Systeme Haccp Et BPHDocument21 paginiSysteme Haccp Et BPHJovanie KouedjiÎncă nu există evaluări
- Mise en Place Du Système HACCP Pour Le Lait Pasteurisé - BELLAH NaimaDocument34 paginiMise en Place Du Système HACCP Pour Le Lait Pasteurisé - BELLAH NaimaHaméd HamèdÎncă nu există evaluări
- Cours TraçabilitéDocument41 paginiCours Traçabilitébenbenmed100% (3)
- HACCPDocument35 paginiHACCPRabhÎncă nu există evaluări
- Formation Iso 22 000Document195 paginiFormation Iso 22 000AmilletÎncă nu există evaluări
- 16.conclusion GénéraleDocument2 pagini16.conclusion GénéraleTaha OukaseÎncă nu există evaluări
- Plan Haccp-3Document33 paginiPlan Haccp-3Suma MulimÎncă nu există evaluări
- Pfe Suivi Des Biotoxines ASP Version FinaleDocument51 paginiPfe Suivi Des Biotoxines ASP Version Finaleoussama ouakrimÎncă nu există evaluări
- Objectifs, Avantages Et Moyens Du Système HACCP PDFDocument4 paginiObjectifs, Avantages Et Moyens Du Système HACCP PDFHervé BonnaudÎncă nu există evaluări
- Support Cours Laiterie Seq 1 2021Document77 paginiSupport Cours Laiterie Seq 1 2021Hana MallekÎncă nu există evaluări
- Système HACCP Poulet MarinéeDocument37 paginiSystème HACCP Poulet MarinéeSuma MulimÎncă nu există evaluări
- Suivi Des Paramètres Microbiologiques EtDocument67 paginiSuivi Des Paramètres Microbiologiques Etamina imeneÎncă nu există evaluări
- Management Qualité en Industrie PharmaceutiqueDocument49 paginiManagement Qualité en Industrie PharmaceutiqueWalid Masmoudi100% (1)
- Utilisation de La Farine Du Ble DurDocument24 paginiUtilisation de La Farine Du Ble Durradi.daniel100% (1)
- Définition de L HACCPDocument4 paginiDéfinition de L HACCPAbdenacer MouffokÎncă nu există evaluări
- Incertitude de Mesure en Microbiologie Des Aliments Travaux Actuels de NormalisationDocument1 paginăIncertitude de Mesure en Microbiologie Des Aliments Travaux Actuels de NormalisationFATMA YOUCEFIÎncă nu există evaluări
- Teneur en Eau Dans Les Fruits Secs PDFDocument39 paginiTeneur en Eau Dans Les Fruits Secs PDFkokoÎncă nu există evaluări
- Présentation de Laboratoire de La MicrobiologieDocument3 paginiPrésentation de Laboratoire de La MicrobiologieBOUMECHHOUR FatimaÎncă nu există evaluări
- Rapport de StageDocument18 paginiRapport de StageyoucefÎncă nu există evaluări
- III - Caracteristiques Des Produits AlimentairesDocument13 paginiIII - Caracteristiques Des Produits AlimentairescostaÎncă nu există evaluări
- Manuel Modes Operatoires Dosage Des Matieres EN Suspension (Mes)Document2 paginiManuel Modes Operatoires Dosage Des Matieres EN Suspension (Mes)Victorine KOUEKAMÎncă nu există evaluări
- Validation D'un Procédé de Nettoyage Physico-Chimique Et Microbiologique D'une Cuve de Mélange Forme Liquide PDFDocument86 paginiValidation D'un Procédé de Nettoyage Physico-Chimique Et Microbiologique D'une Cuve de Mélange Forme Liquide PDFMichael RaimÎncă nu există evaluări
- Les TP Du LaitDocument63 paginiLes TP Du LaitZineb BelalaÎncă nu există evaluări
- Contribution À La Mise en Place D'un Système de Management de La Sécurité Des Denrées Alimentaires Selon La Norme ISO 22000 V 20Document71 paginiContribution À La Mise en Place D'un Système de Management de La Sécurité Des Denrées Alimentaires Selon La Norme ISO 22000 V 20safirÎncă nu există evaluări
- Rapport de Stage Onssa MicroDocument28 paginiRapport de Stage Onssa MicroChaymae LachkerÎncă nu există evaluări
- ExposeDocument53 paginiExposeBENHDAÎncă nu există evaluări
- Boukhalfa AminaDocument93 paginiBoukhalfa AminaEvariste DJEHOMÎncă nu există evaluări
- Les Bonnes Pratiques de Fabrication RésuméDocument16 paginiLes Bonnes Pratiques de Fabrication RésuménourÎncă nu există evaluări
- Iso 22000Document21 paginiIso 22000Nour MassoudiÎncă nu există evaluări
- Article 6 La Transformation de La TomateDocument4 paginiArticle 6 La Transformation de La TomateBesma ZARAIÎncă nu există evaluări
- RésuméCoursHygiène Et Sécurité AlimentaireDocument100 paginiRésuméCoursHygiène Et Sécurité AlimentaireHanadi HanadiÎncă nu există evaluări
- Application Du Système HACCP Sur La Production Du Jus Dorange Tchina Entreprise CevitalDocument82 paginiApplication Du Système HACCP Sur La Production Du Jus Dorange Tchina Entreprise CevitalYousra Yammani100% (2)
- PrésentationDocument14 paginiPrésentationsouraaÎncă nu există evaluări
- BPFDocument55 paginiBPFamineÎncă nu există evaluări
- FSSC-22000-Francais Version6Document83 paginiFSSC-22000-Francais Version6honorabossladyÎncă nu există evaluări
- Haccp & Iso 22000Document56 paginiHaccp & Iso 22000Patricia Kamdoum100% (1)
- Mémoire: ThèmeDocument69 paginiMémoire: ThèmeSoumia AbboudÎncă nu există evaluări
- Le Plan de Maîtrise sanitaire-HACCP - Cours ProfDocument2 paginiLe Plan de Maîtrise sanitaire-HACCP - Cours ProfChristian CINO100% (1)
- Controles de SterilisationDocument36 paginiControles de Sterilisationsaid3232Încă nu există evaluări
- Chapitre 5 Leadership Iso 22000 V 2018Document11 paginiChapitre 5 Leadership Iso 22000 V 2018AgroAliment.netÎncă nu există evaluări
- TraitementThermique PDFDocument5 paginiTraitementThermique PDFElyazghi Abdellah100% (1)
- TPE Emballage FinalDocument23 paginiTPE Emballage FinalCHOFOR VITALISÎncă nu există evaluări
- Ion Des Baremes de SterilisationDocument98 paginiIon Des Baremes de SterilisationSaid BouzirÎncă nu există evaluări
- Prpo PDFDocument89 paginiPrpo PDFLA HadjerÎncă nu există evaluări
- Microbiologie médicale II: stérilisation, diagnostic de laboratoire et réponse immunitaireDe la EverandMicrobiologie médicale II: stérilisation, diagnostic de laboratoire et réponse immunitaireÎncă nu există evaluări
- Calcul Des ChaudiéresDocument5 paginiCalcul Des ChaudiéresMourad Rabah100% (3)
- Calcul Des ChaudiéresDocument5 paginiCalcul Des ChaudiéresMourad Rabah100% (3)
- Les Diagrammes ThermodynamiquesDocument3 paginiLes Diagrammes ThermodynamiquesHassan Amrani0% (1)
- Eau Douce PDFDocument79 paginiEau Douce PDFMourad RabahÎncă nu există evaluări
- Calcul Des Chaudiéres2Document5 paginiCalcul Des Chaudiéres2Mourad Rabah100% (1)
- TD Structure de LewisDocument9 paginiTD Structure de LewisMourad RabahÎncă nu există evaluări
- Analyses Physico-Chimiques Des Eaux de Process Et Des Boissons de SARL IFRI PDFDocument74 paginiAnalyses Physico-Chimiques Des Eaux de Process Et Des Boissons de SARL IFRI PDFMourad Rabah100% (1)
- CondenseurDocument6 paginiCondenseurMourad RabahÎncă nu există evaluări
- Pe - Traitdes EauxDocument156 paginiPe - Traitdes EauxMourad RabahÎncă nu există evaluări
- Chaine de ProductionDocument9 paginiChaine de ProductionMourad Rabah100% (3)
- Infp 0706Document68 paginiInfp 0706Mourad RabahÎncă nu există evaluări
- ThermoDocument135 paginiThermotitebinÎncă nu există evaluări
- Os Chimie Corrige Ch6Document82 paginiOs Chimie Corrige Ch6Mourad RabahÎncă nu există evaluări
- Cinética Eletroquímica FRDocument264 paginiCinética Eletroquímica FRBryan de BarrosÎncă nu există evaluări
- Systéme HACCPDocument100 paginiSystéme HACCPMourad Rabah100% (8)
- Cinetique IIDocument2 paginiCinetique IIMourad RabahÎncă nu există evaluări
- Qualité D EauDocument107 paginiQualité D EauMourad RabahÎncă nu există evaluări
- Os Chimie Corrige Ch6Document52 paginiOs Chimie Corrige Ch6Said SouhassouÎncă nu există evaluări
- Etude de La Qualite Des Eaux Souterraines PDFDocument47 paginiEtude de La Qualite Des Eaux Souterraines PDFMourad RabahÎncă nu există evaluări
- Etude de La Qualite Des Eaux Souterraines PDFDocument47 paginiEtude de La Qualite Des Eaux Souterraines PDFMourad RabahÎncă nu există evaluări
- ConservesDocument8 paginiConservesMourad RabahÎncă nu există evaluări
- Etude de La Qualite Des Eaux Souterraines PDFDocument47 paginiEtude de La Qualite Des Eaux Souterraines PDFMourad RabahÎncă nu există evaluări
- Electro P HoreseDocument17 paginiElectro P HoresehamoumÎncă nu există evaluări
- Manuel Des Protocoles D'échantillonnage Pour L'analyse de La Qualité de L'eau Au CanadaDocument219 paginiManuel Des Protocoles D'échantillonnage Pour L'analyse de La Qualité de L'eau Au CanadaMourad RabahÎncă nu există evaluări
- Le Lait CamelinDocument5 paginiLe Lait CamelinMourad RabahÎncă nu există evaluări
- 7 11Document6 pagini7 11abdelbarrÎncă nu există evaluări
- PARAMETRES PHYSICO-CHIMIQUES DES EAUX Mesures in SituDocument55 paginiPARAMETRES PHYSICO-CHIMIQUES DES EAUX Mesures in SituMourad RabahÎncă nu există evaluări
- TP Spécialité 13 - Dosage Du FerDocument1 paginăTP Spécialité 13 - Dosage Du FerMourad Rabah0% (1)
- 158 170 PDFDocument14 pagini158 170 PDFabdelbarrÎncă nu există evaluări
- L3 TP JetDocument6 paginiL3 TP JetAmel HydÎncă nu există evaluări
- EXA AutoDocument6 paginiEXA Autoقرين لطفيÎncă nu există evaluări
- Exercices D'algorithmique CorrigésDocument7 paginiExercices D'algorithmique Corrigésmaroua meskineÎncă nu există evaluări
- Cours TGDocument45 paginiCours TGRadia GanaÎncă nu există evaluări
- Ajp Jphyscol198142c119Document16 paginiAjp Jphyscol198142c119Wassini BensÎncă nu există evaluări
- 03 Vocabulaire MetrologiqueDocument14 pagini03 Vocabulaire MetrologiqueBouchedda YassineÎncă nu există evaluări
- Fiche EnseignantDocument4 paginiFiche EnseignantWulfaÎncă nu există evaluări
- Inbound MarketingDocument13 paginiInbound MarketingPaweł SajdekÎncă nu există evaluări
- Note Technique de La Voie D'acces Principlae VFDocument21 paginiNote Technique de La Voie D'acces Principlae VFSanaaÎncă nu există evaluări
- Etude Et Conception D'une Centrale A BetonDocument60 paginiEtude Et Conception D'une Centrale A Betonjihenk100% (14)
- Uca2 1 1aDocument3 paginiUca2 1 1aMarieÎncă nu există evaluări
- Mini Projet UrbanismeDocument5 paginiMini Projet UrbanismeBadra Ali SanogoÎncă nu există evaluări
- Weber Le Savant Et Le Politique (Annotations)Document1 paginăWeber Le Savant Et Le Politique (Annotations)bilou11070% (1)
- 293 Conception de La Commande de Processus PopescuDocument295 pagini293 Conception de La Commande de Processus PopescuSteve DemirelÎncă nu există evaluări
- Iec 60372Document46 paginiIec 60372Luis Andres Pradenas FuentesÎncă nu există evaluări
- Annexe I Construction Hangar Chambre FroideDocument51 paginiAnnexe I Construction Hangar Chambre FroideAL DialloÎncă nu există evaluări
- Communiquer Communiquer: Figure 1: Deux Décompositions de La Tâche TDocument12 paginiCommuniquer Communiquer: Figure 1: Deux Décompositions de La Tâche The200gab100% (1)
- Le Zodiaque de Dendérah (Réparé)Document40 paginiLe Zodiaque de Dendérah (Réparé)marion100% (1)
- Glenn Murcutt - CompressedDocument12 paginiGlenn Murcutt - CompressedpianoÎncă nu există evaluări
- P2621v2analyse Des Surface Technique de L IngenieurDocument13 paginiP2621v2analyse Des Surface Technique de L IngenieursalimÎncă nu există evaluări
- Cellule - Ultra - Cours PDFDocument6 paginiCellule - Ultra - Cours PDFAdaÎncă nu există evaluări
- Que Faut - Il Retenir Sur Les Nombres Complexes PDFDocument2 paginiQue Faut - Il Retenir Sur Les Nombres Complexes PDFMichaël Ronio BezandryÎncă nu există evaluări
- Devoir M1 MathDocument1 paginăDevoir M1 MathSolene TsinaÎncă nu există evaluări
- Filtre A CartoucheDocument20 paginiFiltre A Cartouchenasser kamakenÎncă nu există evaluări
- MC1.06 Metallurgie Generale Et Choix Des Materiaux 3jDocument1 paginăMC1.06 Metallurgie Generale Et Choix Des Materiaux 3jGuillaumeÎncă nu există evaluări
- Correction Emd MR 2017 2018Document4 paginiCorrection Emd MR 2017 2018Benlouanas KamelÎncă nu există evaluări
- Evaluation Des Gains Dans Les Systèmes de Communication OptiqueDocument35 paginiEvaluation Des Gains Dans Les Systèmes de Communication OptiqueMichel GwosÎncă nu există evaluări
- Voyage Du Jeune - Tome 3Document568 paginiVoyage Du Jeune - Tome 3Paula AranhaÎncă nu există evaluări
- Chapitre 2-2Document15 paginiChapitre 2-2Reda BachnouÎncă nu există evaluări
- TS 019m 184 (OA4 ROUHIA TE2S 2ID)Document69 paginiTS 019m 184 (OA4 ROUHIA TE2S 2ID)jawhar eddine boukhrisÎncă nu există evaluări