S-ar putea să vă placă și
- Lectura de ElectrocardiogramaDocument4 paginiLectura de ElectrocardiogramaJuan Sebastian Espinosa SernaÎncă nu există evaluări
- Informe 5. ReynoldsDocument11 paginiInforme 5. ReynoldsCynthia RamírezÎncă nu există evaluări
- Formato - Hoja de Fabricación - 23-04-2020Document24 paginiFormato - Hoja de Fabricación - 23-04-2020STEVEN FELIPE FLOREZ CORDOBAÎncă nu există evaluări
- Identificación de HallazgosDocument3 paginiIdentificación de HallazgosStid UribeÎncă nu există evaluări
- Procedimiento para Desmontaje de Estructuras MetálicasDocument2 paginiProcedimiento para Desmontaje de Estructuras MetálicasLucero Ascate LudeñaÎncă nu există evaluări
- Clase N - 1 - Introducción A Los MaterialesDocument24 paginiClase N - 1 - Introducción A Los MaterialesSebastian Ruiz PeraltaÎncă nu există evaluări
- 1.2 Calidad en El Servicio.Document5 pagini1.2 Calidad en El Servicio.Jaxel Zur ZebdreÎncă nu există evaluări
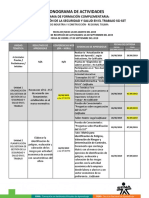
- Cronograma de Actividades SG-SSTDocument3 paginiCronograma de Actividades SG-SSTLenaRyuugu100% (1)
- Dialnet BuenasPracticasAplicadasALaImplementacionColaborat 5351802 PDFDocument4 paginiDialnet BuenasPracticasAplicadasALaImplementacionColaborat 5351802 PDFRJGuerreroÎncă nu există evaluări
- IEA TabelaPrecosDocument174 paginiIEA TabelaPrecosCarlos Manuel Machado FerreiraÎncă nu există evaluări
- Actividades de Comprobación T3 y T4Document4 paginiActividades de Comprobación T3 y T4Pablo Molero MartínÎncă nu există evaluări
- Ejercicio Sobre Consultas BásicasDocument4 paginiEjercicio Sobre Consultas BásicasPepe Lomeli IbarraÎncă nu există evaluări
- Salida Pedagogica Induminas 2 TasajeroDocument9 paginiSalida Pedagogica Induminas 2 TasajeroPeter GonzalezÎncă nu există evaluări
- Instalacion Openfire y SparkwebDocument6 paginiInstalacion Openfire y SparkwebtlcarrillopÎncă nu există evaluări
- Presas de TierraDocument50 paginiPresas de Tierradenihtg83% (12)
- Cartilla 1 - Tramo IIDocument309 paginiCartilla 1 - Tramo IIValeria Burgos100% (1)
- Manual de Usuario Instalacion Oracle 11g UbuntuDocument20 paginiManual de Usuario Instalacion Oracle 11g Ubuntumaximus1789Încă nu există evaluări
- Ejercicio Balance de Masa ExcelDocument7 paginiEjercicio Balance de Masa Excelgonzalo martinezÎncă nu există evaluări
- Mecanizado PDFDocument8 paginiMecanizado PDFPedro Leos100% (1)
- Proyecto Del 2º Momento Sistema SolarDocument7 paginiProyecto Del 2º Momento Sistema SolarYulenny Carrillo92% (12)
- 1re Laboratorio de Electronica de Potencia Fim-UniDocument19 pagini1re Laboratorio de Electronica de Potencia Fim-UniHenry Rivas LauraÎncă nu există evaluări
- Trabajo de Calidad 2 (Taller)Document8 paginiTrabajo de Calidad 2 (Taller)Carmen Florez RomeroÎncă nu există evaluări
- Sistema de Alquiler de VehiculosDocument50 paginiSistema de Alquiler de VehiculosJose Miguel Hernandez ChumaceroÎncă nu există evaluări
- Informe Práctica 3Document3 paginiInforme Práctica 3Alejandro Bañol EscobarÎncă nu există evaluări
- Informe - Circuito Rl.Document8 paginiInforme - Circuito Rl.Juan Ospina100% (1)
- Mexicanos Consideran "Peligrosos A Científicos - El Universal - MéxicoDocument3 paginiMexicanos Consideran "Peligrosos A Científicos - El Universal - MéxicoNoah VjÎncă nu există evaluări
- Proyecto La NoticiaDocument12 paginiProyecto La NoticiaJosefina VarelaÎncă nu există evaluări
- PETS Preparación de AlimentosDocument3 paginiPETS Preparación de Alimentosju_garo100% (2)
- ETSIIT GII FS 1718 FundDelSoftware.v1Document6 paginiETSIIT GII FS 1718 FundDelSoftware.v1Ramón PérezÎncă nu există evaluări