S-ar putea să vă placă și
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsDe la EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsEvaluare: 4.5 din 5 stele4.5/5 (10)
- 2101r2016 Guideline Verifying Field Performance Epoxy Injection Concrete CracksDocument18 pagini2101r2016 Guideline Verifying Field Performance Epoxy Injection Concrete CracksEdgar Joel Perez Carvajal100% (1)
- A 1 1 E1557 05 Uniformat II PDFDocument54 paginiA 1 1 E1557 05 Uniformat II PDFPercy SuarezÎncă nu există evaluări
- Lecture Notes in Structural Engineering Analysis DesignDocument142 paginiLecture Notes in Structural Engineering Analysis DesignPankaj_Taneja_9684100% (1)
- Footfall The Structural EngineerDocument4 paginiFootfall The Structural EngineerSamuel ShimÎncă nu există evaluări
- ISO EN 82079-1 - Manuals For IndustryDocument31 paginiISO EN 82079-1 - Manuals For IndustryStanÎncă nu există evaluări
- CONSTRUCTION OF INTERNAL ROADS & INFRASTRUCTURE WORKS FOR SECTOR EAST 25, PHASE 2, ABU DHABI - DELAY EVENT IMPACT CALCULATIONSDocument10 paginiCONSTRUCTION OF INTERNAL ROADS & INFRASTRUCTURE WORKS FOR SECTOR EAST 25, PHASE 2, ABU DHABI - DELAY EVENT IMPACT CALCULATIONS143Încă nu există evaluări
- Design of Deep Beam Using Strut and Tie MethodDocument17 paginiDesign of Deep Beam Using Strut and Tie Methodsuman33100% (2)
- Modern Approaches to Discrete, Integrated Component and System Reliability Engineering: Reliability EngineeringDe la EverandModern Approaches to Discrete, Integrated Component and System Reliability Engineering: Reliability EngineeringÎncă nu există evaluări
- Master Plumber Exam Coverage (Philippines)Document4 paginiMaster Plumber Exam Coverage (Philippines)Eugene Micarandayo100% (3)
- Enterprise Architecture at Work: Modelling, Communication and AnalysisDe la EverandEnterprise Architecture at Work: Modelling, Communication and AnalysisEvaluare: 1.5 din 5 stele1.5/5 (3)
- Footfall Vibration and Finite Element AnalysisDocument6 paginiFootfall Vibration and Finite Element AnalysisRonald De GuzmanÎncă nu există evaluări
- Wind Loads On High-Rise Buildings by Using Five Major International Wind Codes and StandardsDocument13 paginiWind Loads On High-Rise Buildings by Using Five Major International Wind Codes and StandardsboyÎncă nu există evaluări
- Info Penting Ahli Struktur GempaDocument337 paginiInfo Penting Ahli Struktur Gempadicky1969Încă nu există evaluări
- Control ValvesDocument30 paginiControl ValvesArnab DeÎncă nu există evaluări
- CPM - PertDocument48 paginiCPM - Pertrocklife008Încă nu există evaluări
- AbzenoDocument7 paginiAbzenojykhgpdrc5Încă nu există evaluări
- CASTING Design GuideDocument54 paginiCASTING Design GuideXin Yu75% (4)
- User Manual: Explanation of SymbolsDocument4 paginiUser Manual: Explanation of SymbolsFrancisco Javier Cerezo LacasaÎncă nu există evaluări
- Strut and Tie CalculationDocument8 paginiStrut and Tie Calculationgmazzucco100% (4)
- Uniformat Ii - 2015Document45 paginiUniformat Ii - 2015francois Bas paysÎncă nu există evaluări
- Building Elements and Related Sitework-UNIFORMAT II: Standard Classification ForDocument54 paginiBuilding Elements and Related Sitework-UNIFORMAT II: Standard Classification ForROHITÎncă nu există evaluări
- BS 5516-1 2004Document68 paginiBS 5516-1 2004Robert CoelhoÎncă nu există evaluări
- Astm E1557 09 (2020)Document45 paginiAstm E1557 09 (2020)Patrick LitteeÎncă nu există evaluări
- 5990-4977EN FoodDocument104 pagini5990-4977EN FoodjoseÎncă nu există evaluări
- Project Report PDFDocument4 paginiProject Report PDFPradeep VermaÎncă nu există evaluări
- 20 Design Guide For Floor VibrationsDocument6 pagini20 Design Guide For Floor VibrationsMohamed Tahar Allagui100% (1)
- Nguyen 2020 IOP Conf. Ser. Mater. Sci. Eng. 869 052004Document9 paginiNguyen 2020 IOP Conf. Ser. Mater. Sci. Eng. 869 052004Tom NgÎncă nu există evaluări
- Acoustical Comfort in OfficesDocument6 paginiAcoustical Comfort in OfficesNOHEL1487Încă nu există evaluări
- User Experience Over Time: January 2008Document7 paginiUser Experience Over Time: January 2008Mohtasim Bin HabibÎncă nu există evaluări
- Experience Counts!: Modular Process SystemsDocument12 paginiExperience Counts!: Modular Process Systemsingegnere1234Încă nu există evaluări
- EDAD Complete TheoryDocument417 paginiEDAD Complete Theorykhosla.shreshthÎncă nu există evaluări
- 05 GsaNotes FootfallDocument6 pagini05 GsaNotes FootfallAJA14Încă nu există evaluări
- Case 2Document67 paginiCase 2Batool Al-kharabshehÎncă nu există evaluări
- Case Study Renovation of Hotel Alte Post, TirolDocument4 paginiCase Study Renovation of Hotel Alte Post, Tiroljethropaul90Încă nu există evaluări
- 069 P OrihuelaDocument10 pagini069 P OrihuelaenriquehenriÎncă nu există evaluări
- GPS1 enDocument5 paginiGPS1 enKlocÎncă nu există evaluări
- ACE - Main Catalog-2018-US-metricDocument294 paginiACE - Main Catalog-2018-US-metricxavicojmÎncă nu există evaluări
- Performancemeasurementprotocols Comm BldgsDocument15 paginiPerformancemeasurementprotocols Comm BldgsMuhammadAhmadÎncă nu există evaluări
- EnidineDocument88 paginiEnidineapi-26356646Încă nu există evaluări
- Wind Turbine Blades: Epotec Epoxy SystemsDocument4 paginiWind Turbine Blades: Epotec Epoxy SystemsAditya ShrivastavaÎncă nu există evaluări
- Standard Guide For Selecting Techniques For Treating Uncertainty and Risk in The Economic Evaluation of Buildings and Building SystemsDocument17 paginiStandard Guide For Selecting Techniques For Treating Uncertainty and Risk in The Economic Evaluation of Buildings and Building SystemsSachin KumarÎncă nu există evaluări
- Tolerance Stack-Up Analysis - A ReviewDocument7 paginiTolerance Stack-Up Analysis - A ReviewShubham JagtapÎncă nu există evaluări
- Introduction of A Performance-Based DesignDocument8 paginiIntroduction of A Performance-Based DesignEdgarÎncă nu există evaluări
- DraggieDocument11 paginiDraggieMuhamad Nur IssamÎncă nu există evaluări
- Extruder Times 7Document12 paginiExtruder Times 7skimmer05Încă nu există evaluări
- DVF ManualDocument26 paginiDVF Manualunytrix accountsÎncă nu există evaluări
- Stunning Al Hilal Bank Tower in Abu DhabiDocument8 paginiStunning Al Hilal Bank Tower in Abu Dhabiandy mochmmadÎncă nu există evaluări
- Cement-Plant-Brochure For - IN - INRDocument24 paginiCement-Plant-Brochure For - IN - INRIsaiah JohnÎncă nu există evaluări
- Taiko ProductsDocument7 paginiTaiko ProductsAntonio AvilesÎncă nu există evaluări
- DEMMELER Katalog Proizvoda 2016Document190 paginiDEMMELER Katalog Proizvoda 2016predragstojicicÎncă nu există evaluări
- Brochure Heavy Lift Spreader BeamsDocument8 paginiBrochure Heavy Lift Spreader Beamsmocaji5786Încă nu există evaluări
- ShaftDesignVerication IJEIR April2015Document11 paginiShaftDesignVerication IJEIR April2015Shahrukh KhanÎncă nu există evaluări
- Towler - Chemical - Engineering - Design - MS Powerpoint PDFDocument13 paginiTowler - Chemical - Engineering - Design - MS Powerpoint PDFhananurdinaaaÎncă nu există evaluări
- TSE TrainingDocument28 paginiTSE TrainingseemeshwariÎncă nu există evaluări
- Catalog 2016 General MetrelDocument240 paginiCatalog 2016 General MetrelSteveÎncă nu există evaluări
- TB91 Activity Selection in SBEMDocument6 paginiTB91 Activity Selection in SBEMravÎncă nu există evaluări
- Evaluation and Improvement of Plant Inventory and Layout Design in Automobile Service IndustriesDocument8 paginiEvaluation and Improvement of Plant Inventory and Layout Design in Automobile Service IndustriesAlao PeterÎncă nu există evaluări
- IJIE12Document10 paginiIJIE12hjjglobalÎncă nu există evaluări
- ISE 460/ETM 593 Facilities Planning & Design: Dr. Laura Moody Spring 2012Document63 paginiISE 460/ETM 593 Facilities Planning & Design: Dr. Laura Moody Spring 2012canhizÎncă nu există evaluări
- SCOPE OF ARCHITECTURAL ACOUSTIC CONSULTANT'S WORK - Geonoise Asia Co., LTDDocument1 paginăSCOPE OF ARCHITECTURAL ACOUSTIC CONSULTANT'S WORK - Geonoise Asia Co., LTDaleisterparadigma666Încă nu există evaluări
- Composites Brochure A4Document12 paginiComposites Brochure A4july.ph29Încă nu există evaluări
- Sensor and Safety Line Up PDFDocument6 paginiSensor and Safety Line Up PDFddsatttrreÎncă nu există evaluări
- Serviceability of An Office Facility For Special Facilities and TechnologiesDocument8 paginiServiceability of An Office Facility For Special Facilities and TechnologiesEdmundo Jaita CuellarÎncă nu există evaluări
- MULTI V 5 Catalogue - SmallDocument14 paginiMULTI V 5 Catalogue - SmallChristian AtubanÎncă nu există evaluări
- Guidelines For Hurricane Resistant Residential Construction (ICC) - 2005Document164 paginiGuidelines For Hurricane Resistant Residential Construction (ICC) - 2005Tim CubberÎncă nu există evaluări
- 2011-Rapid demountable platform (RDP)Document11 pagini2011-Rapid demountable platform (RDP)Mohd ShafiqÎncă nu există evaluări
- Compliance Catalogue Eng 24 Jul 2008Document186 paginiCompliance Catalogue Eng 24 Jul 2008chanchalÎncă nu există evaluări
- User satisfaction and quality in furniture industryDocument18 paginiUser satisfaction and quality in furniture industrybelal545Încă nu există evaluări
- جامعة أم القرى ماجستير العمارة المستدامةDocument21 paginiجامعة أم القرى ماجستير العمارة المستدامةat gazzazÎncă nu există evaluări
- Presentaciones Prof Jin-Keun Kim PDFDocument206 paginiPresentaciones Prof Jin-Keun Kim PDFRobert CoelhoÎncă nu există evaluări
- Concrete 17 - Autogenous Shrinkage 1Document8 paginiConcrete 17 - Autogenous Shrinkage 1Robert CoelhoÎncă nu există evaluări
- CSiXRevit 2019 ManualDocument103 paginiCSiXRevit 2019 Manualbluefish80Încă nu există evaluări
- FEA Hot Spot Analysis ProcedureDocument22 paginiFEA Hot Spot Analysis ProcedureRobert CoelhoÎncă nu există evaluări
- Fire Safety Concrete BuildingsDocument37 paginiFire Safety Concrete BuildingsSiva VikramÎncă nu există evaluări
- Web 5211Document74 paginiWeb 5211Anonymous oVmxT9KzrbÎncă nu există evaluări
- VFBDSD PDFDocument1 paginăVFBDSD PDFRobert CoelhoÎncă nu există evaluări
- Bchdefcj ndj document summaryDocument1 paginăBchdefcj ndj document summaryRobert CoelhoÎncă nu există evaluări
- Creep & shrinkage analysis of a beamDocument4 paginiCreep & shrinkage analysis of a beamNilay GandhiÎncă nu există evaluări
- SD UploadDocument1 paginăSD UploadRobert CoelhoÎncă nu există evaluări
- A New DayDocument1 paginăA New DayRobert CoelhoÎncă nu există evaluări
- Scoring Rubric For Oral Presentations Total Points ScoreDocument2 paginiScoring Rubric For Oral Presentations Total Points ScoreLezia pagdonsolanÎncă nu există evaluări
- Manual, contact info and schematic for GSM moduleDocument10 paginiManual, contact info and schematic for GSM modulethaiÎncă nu există evaluări
- Service Manual Sony MHC-V5Document122 paginiService Manual Sony MHC-V5Enya Andrea Ribba HernandezÎncă nu există evaluări
- Padlock Sharper Image FingerprintDocument1 paginăPadlock Sharper Image FingerprintHenryW.CampbellJr.Încă nu există evaluări
- Occupant Manikin Introduction: 95th Percentile Male Driver ModelDocument9 paginiOccupant Manikin Introduction: 95th Percentile Male Driver ModelarstjunkÎncă nu există evaluări
- Acronyms Used in Offshore ConstructionDocument32 paginiAcronyms Used in Offshore ConstructionDaniel De Assis ItaborahyÎncă nu există evaluări
- MTO Response Letter 0609Document3 paginiMTO Response Letter 0609hwy7and8Încă nu există evaluări
- DevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0Document1 paginăDevelopmentThatPays ScrumToScrumban CheatSheet 2 - 0tarikÎncă nu există evaluări
- Datasheet - SP 275K INH String InvDocument1 paginăDatasheet - SP 275K INH String Invsharib26Încă nu există evaluări
- Fluid Mechanics-I: by Dr. Fayaz A Khan Assistant Professor, UET Bannu CampusDocument22 paginiFluid Mechanics-I: by Dr. Fayaz A Khan Assistant Professor, UET Bannu CampusAsim WazirÎncă nu există evaluări
- Abstract Substructure Conc - Frame Westgate RealDocument4 paginiAbstract Substructure Conc - Frame Westgate RealTashamiswa MajachaniÎncă nu există evaluări
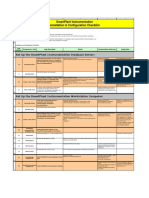
- SmartPlant Instrumentation installation checklistDocument2 paginiSmartPlant Instrumentation installation checklistmnoormohamed82Încă nu există evaluări
- BOE-025 Consejo de EstadoDocument1 paginăBOE-025 Consejo de Estado15mls23Încă nu există evaluări
- Mapping UCLA Network DrivesDocument2 paginiMapping UCLA Network DriveswebscaleÎncă nu există evaluări
- DYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProcedureDocument7 paginiDYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProceduremahsaÎncă nu există evaluări
- Eaton 9130 Rack 700-3000vaDocument4 paginiEaton 9130 Rack 700-3000vaJose Luis PintoÎncă nu există evaluări
- Sustainable Energy and Resource ManagementDocument318 paginiSustainable Energy and Resource ManagementRajdeepSenÎncă nu există evaluări
- Parts List CMX1402Document36 paginiParts List CMX1402Jayden BarnesÎncă nu există evaluări
- Task #2 SIA-309 Perancangan Fondasi 2: Retaining WallsDocument1 paginăTask #2 SIA-309 Perancangan Fondasi 2: Retaining WallsDesti Santi PratiwiÎncă nu există evaluări
- HTML5 Element Cheatsheet 2019Document1 paginăHTML5 Element Cheatsheet 2019vVvÎncă nu există evaluări
- Converting Urban Waste To EnergyDocument11 paginiConverting Urban Waste To EnergyDéépákÎncă nu există evaluări
- Akeeba Backup Guide PDFDocument185 paginiAkeeba Backup Guide PDFJhon ArteagaÎncă nu există evaluări
- Baguio Schools Teacher Deployment AnalysisDocument2 paginiBaguio Schools Teacher Deployment AnalysisDon Mariano Marcos Elementary SchoolÎncă nu există evaluări
- Schools Division of Pasay City outlines 5S workplace organizationDocument9 paginiSchools Division of Pasay City outlines 5S workplace organizationJhaexelle allenah AlfonsoÎncă nu există evaluări
- Djdusty VideolistDocument302 paginiDjdusty VideolistgonduÎncă nu există evaluări