S-ar putea să vă placă și
- p7 Subminiature Pushbuttons Catalog PageDocument3 paginip7 Subminiature Pushbuttons Catalog PageX'mix ĐreamerÎncă nu există evaluări
- MineStar Health Connectivity MatrixDocument11 paginiMineStar Health Connectivity MatrixX'mix ĐreamerÎncă nu există evaluări
- BdjsjjaDocument10 paginiBdjsjjaX'mix ĐreamerÎncă nu există evaluări
- Battery SpecsDocument2 paginiBattery SpecsAbraham SaucedoÎncă nu există evaluări
- Spareparts, Service and Technical Supplay ForDocument1 paginăSpareparts, Service and Technical Supplay ForX'mix ĐreamerÎncă nu există evaluări
- Isuzu 4JB1 Engine Product Knowledge GuideDocument14 paginiIsuzu 4JB1 Engine Product Knowledge GuideX'mix ĐreamerÎncă nu există evaluări
- 01 Engine4jb1Document5 pagini01 Engine4jb1X'mix ĐreamerÎncă nu există evaluări
- High-voltage NPN transistor spec sheetDocument4 paginiHigh-voltage NPN transistor spec sheetX'mix ĐreamerÎncă nu există evaluări
- Spareparts, Service and Technical Supplay ForDocument1 paginăSpareparts, Service and Technical Supplay ForX'mix ĐreamerÎncă nu există evaluări
- Adjust Valve Lash PDFDocument7 paginiAdjust Valve Lash PDFX'mix ĐreamerÎncă nu există evaluări
- Ds Da T en Ma 20171107 HeDocument36 paginiDs Da T en Ma 20171107 HeX'mix ĐreamerÎncă nu există evaluări
- DS/DA-T Series: Instruction ManualDocument1 paginăDS/DA-T Series: Instruction ManualX'mix ĐreamerÎncă nu există evaluări
- Hydraulic Breaker Specification PDFDocument1 paginăHydraulic Breaker Specification PDFX'mix ĐreamerÎncă nu există evaluări
- IGS NT 2.4 Troubleshooting Guide ADocument39 paginiIGS NT 2.4 Troubleshooting Guide ARicardo Nunes Pereira Junior100% (1)
- Product Knowledge 2 Engine 4JB1: Isuzu Training Center - 1Document14 paginiProduct Knowledge 2 Engine 4JB1: Isuzu Training Center - 1X'mix ĐreamerÎncă nu există evaluări
- DS/DA-T Series: Instruction ManualDocument1 paginăDS/DA-T Series: Instruction ManualX'mix ĐreamerÎncă nu există evaluări
- DS/DA-T Series: Instruction ManualDocument1 paginăDS/DA-T Series: Instruction ManualX'mix ĐreamerÎncă nu există evaluări
- Ds Da T en Ma 20171107 HeDocument36 paginiDs Da T en Ma 20171107 HeX'mix ĐreamerÎncă nu există evaluări
- IGS NT 2.4 Troubleshooting Guide ADocument39 paginiIGS NT 2.4 Troubleshooting Guide ARicardo Nunes Pereira Junior100% (1)
- Sensor Cat BrochureDocument16 paginiSensor Cat Brochuremarioz25Încă nu există evaluări
- Honeywell Sensing Temperature Sensors Line Guide 0 1109480Document12 paginiHoneywell Sensing Temperature Sensors Line Guide 0 1109480X'mix ĐreamerÎncă nu există evaluări
- DS/DA-T Series: Instruction ManualDocument1 paginăDS/DA-T Series: Instruction ManualX'mix ĐreamerÎncă nu există evaluări
- RM25C32DS 32-Kbit 1.65V Minimum Non-Volatile Serial EEPROM Spi BusDocument36 paginiRM25C32DS 32-Kbit 1.65V Minimum Non-Volatile Serial EEPROM Spi BusX'mix ĐreamerÎncă nu există evaluări
- EC25C32 32kbits SPI Serial EEPROM: General DescriptionDocument16 paginiEC25C32 32kbits SPI Serial EEPROM: General DescriptionX'mix ĐreamerÎncă nu există evaluări
- Heui CatDocument27 paginiHeui CatVago Si BeerÎncă nu există evaluări
- S29CD-J & S29CL-J Flash FamilyDocument76 paginiS29CD-J & S29CL-J Flash FamilyX'mix ĐreamerÎncă nu există evaluări
- GetApplicationAttachment PDFDocument216 paginiGetApplicationAttachment PDFX'mix ĐreamerÎncă nu există evaluări
- Percobaan Penggunaan Multimeter Dan OsiloskopDocument26 paginiPercobaan Penggunaan Multimeter Dan OsiloskopX'mix ĐreamerÎncă nu există evaluări
- Caterpillar EMCPDocument40 paginiCaterpillar EMCPrealwild93% (59)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 5Ch4-Data Movement Instructions, Brey Barry PDFDocument111 pagini5Ch4-Data Movement Instructions, Brey Barry PDFChanchan LebumfacilÎncă nu există evaluări
- Si 9241Document5 paginiSi 9241Negru P. PlantatieÎncă nu există evaluări
- Lab6a 2-Out-Of-5 To BCD Code Converter and Display CircuitDocument11 paginiLab6a 2-Out-Of-5 To BCD Code Converter and Display CircuitMustafaAsimÎncă nu există evaluări
- Projekt 1trillion Digits of PiDocument25 paginiProjekt 1trillion Digits of PiFlubberÎncă nu există evaluări
- Toshiba Satellite C650-655 Motherboard Inventec SchematicDocument58 paginiToshiba Satellite C650-655 Motherboard Inventec Schematickorime100% (9)
- Sanjay - High Performance DSP ArchitecturesDocument38 paginiSanjay - High Performance DSP Architecturesapi-3827000Încă nu există evaluări
- 140 Avi 030 00Document40 pagini140 Avi 030 00Sergio Mauricio Acuña BravoÎncă nu există evaluări
- Introduction To Embedded SystemV4Document89 paginiIntroduction To Embedded SystemV4amr083021Încă nu există evaluări
- PLC FatekDocument36 paginiPLC FatekM7mud M7mdÎncă nu există evaluări
- 4Led7SEG - Hien thi 1234 so tren 4 led 7 thanhDocument22 pagini4Led7SEG - Hien thi 1234 so tren 4 led 7 thanhHai DamÎncă nu există evaluări
- Ytk Cpls PDFDocument156 paginiYtk Cpls PDFVivo V5Încă nu există evaluări
- Co Unit 1Document146 paginiCo Unit 1Adivardhan Akash MaheshwariÎncă nu există evaluări
- Course Description File For Comsats CEDocument18 paginiCourse Description File For Comsats CEHizbincoÎncă nu există evaluări
- Gigabyte Motherboard GA-MA78GM-S2H Rev.1.1 Manual PDFDocument100 paginiGigabyte Motherboard GA-MA78GM-S2H Rev.1.1 Manual PDFLangllyÎncă nu există evaluări
- 74 Ls 157Document7 pagini74 Ls 157Sandra Torres QuispeÎncă nu există evaluări
- RTDSP Assignment-Vhdl CodeDocument4 paginiRTDSP Assignment-Vhdl CodeMary JeethuÎncă nu există evaluări
- KvprogDocument79 paginiKvprogCatur AndiriyantoÎncă nu există evaluări
- Sheet5 2011Document4 paginiSheet5 2011Basem Abd ElazizÎncă nu există evaluări
- USB in A NutShellDocument35 paginiUSB in A NutShellSandro Jairzinho Carrascal Ayora100% (1)
- Multichannel UartDocument16 paginiMultichannel UartMani Bharath Nuti100% (2)
- Mbed Pin IO Tutorial PDFDocument5 paginiMbed Pin IO Tutorial PDFIanÎncă nu există evaluări
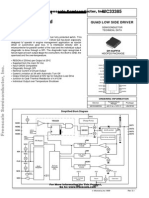
- MC33385 - Atm36bDocument11 paginiMC33385 - Atm36btason07Încă nu există evaluări
- الالكترونيات الرقمية المتقدمةDocument4 paginiالالكترونيات الرقمية المتقدمةQUSI E. ABDÎncă nu există evaluări
- PORT P2 (Pins 21 To 28) Can Also Be Used As A General Purpose 8-Bit Port When NoDocument3 paginiPORT P2 (Pins 21 To 28) Can Also Be Used As A General Purpose 8-Bit Port When NoMohd Harith FikriÎncă nu există evaluări
- USBaspDocument3 paginiUSBaspShahrin MahatÎncă nu există evaluări
- E-Assignment: German-Malaysian InstituteDocument8 paginiE-Assignment: German-Malaysian InstituteYeshi UchihaÎncă nu există evaluări
- tmp100 q1 PDFDocument32 paginitmp100 q1 PDFtunaÎncă nu există evaluări
- 01 Logic DesignDocument53 pagini01 Logic DesignShouvik MusavvirÎncă nu există evaluări
- Edge AI Inference Computer Powered by NVIDIA GPU Cards - P20Document1 paginăEdge AI Inference Computer Powered by NVIDIA GPU Cards - P20Rafael FloresÎncă nu există evaluări