S-ar putea să vă placă și
- Función de TransferenciaDocument27 paginiFunción de TransferenciaRodrigoOlivaresÎncă nu există evaluări
- s4 - Sistemas de 2do OrdenDocument40 paginis4 - Sistemas de 2do OrdenChristian Guzman Trillo100% (1)
- Tecnicas de Control de Chancadoras.Document12 paginiTecnicas de Control de Chancadoras.marcos ruizÎncă nu există evaluări
- Problemas de Control AutomaticoDocument7 paginiProblemas de Control AutomaticoJose Carlos Huaman DonayreÎncă nu există evaluări
- Problemas y Acciones de ControlDocument39 paginiProblemas y Acciones de ControlAlbertina OlivaresÎncă nu există evaluări
- Ejercicios 6Document81 paginiEjercicios 6Fabricio SanchezÎncă nu există evaluări
- Manual SimulinkDocument14 paginiManual SimulinkAlis VillalobosÎncă nu există evaluări
- 1 RespuestaTiempoDocument5 pagini1 RespuestaTiempojean bobadillaÎncă nu există evaluări
- Ejercicios Propuestos de Sistemas Dinámicos Segundo Orden y Orden SuperiorDocument8 paginiEjercicios Propuestos de Sistemas Dinámicos Segundo Orden y Orden SuperiorCarlos PerezÎncă nu există evaluări
- SimulinkDocument50 paginiSimulinkIsmael Fco100% (1)
- Robotica ScaraDocument7 paginiRobotica ScaraFernandoÎncă nu există evaluări
- PID, Filtros Wash-Out y Anti Wind-UpDocument9 paginiPID, Filtros Wash-Out y Anti Wind-UpJose Jurado Hernandez0% (1)
- Control II - Criterio de Estabilidad de NyquistDocument20 paginiControl II - Criterio de Estabilidad de NyquistJovany Salazar100% (1)
- Control de NivelDocument12 paginiControl de NivelPatyHernándezÎncă nu există evaluări
- Trabajo Final 2P Embotellado PLC NRC2681 Equipo 6Document9 paginiTrabajo Final 2P Embotellado PLC NRC2681 Equipo 6CFPerezÎncă nu există evaluări
- Control Curvas de ReaccionDocument9 paginiControl Curvas de ReaccionLuna ArboledaÎncă nu există evaluări
- EXA2G3OI PdfcreatorDocument38 paginiEXA2G3OI PdfcreatorTomas Sanchez TronoÎncă nu există evaluări
- Control StationDocument168 paginiControl StationRichardÎncă nu există evaluări
- Analogias Electricas PDFDocument14 paginiAnalogias Electricas PDFFlor Barcia VeraÎncă nu există evaluări
- Los TransmisoresDocument11 paginiLos TransmisoresCarlos AvileÎncă nu există evaluări
- Funcion de TransferenciaDocument32 paginiFuncion de TransferenciaSilvia VrÎncă nu există evaluări
- Transistor de Unión BipolarDocument9 paginiTransistor de Unión BipolarpastorasabiaÎncă nu există evaluări
- Curso Scada PDFDocument27 paginiCurso Scada PDFJuanillo GranCanaritoÎncă nu există evaluări
- IEE2683 Guia Robotica SimulacionDocument15 paginiIEE2683 Guia Robotica SimulacionSimon AguileraÎncă nu există evaluări
- TP8 CompensadoresDocument4 paginiTP8 CompensadoresKarina CherbiyÎncă nu există evaluări
- Control Cascada PlcsDocument4 paginiControl Cascada PlcsAlex TipantuñaÎncă nu există evaluări
- SEP Laboratorio 1Document67 paginiSEP Laboratorio 1miguelÎncă nu există evaluări
- Registros de DesplazamientoDocument17 paginiRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- Capitulo 1. Señales y SistemasDocument36 paginiCapitulo 1. Señales y SistemasJuan DuarteÎncă nu există evaluări
- Sensores LixiviacionDocument15 paginiSensores Lixiviacionmichael100% (1)
- Practica 1 Calculadora LabviewDocument6 paginiPractica 1 Calculadora LabviewNeshxs CorsheÎncă nu există evaluări
- Lab5 Control2 Unsa EpieDocument15 paginiLab5 Control2 Unsa EpiejorticoolÎncă nu există evaluări
- Ejemplo 2-U3 Diagrama Fasorial Motor SincronoDocument8 paginiEjemplo 2-U3 Diagrama Fasorial Motor SincronoElmer MaderoÎncă nu există evaluări
- Analisis Sistemas de Segundo OrdenDocument11 paginiAnalisis Sistemas de Segundo OrdenKimy Pamela VillalbaÎncă nu există evaluări
- Retardo de ProcesoDocument7 paginiRetardo de ProcesoAlejandro RiveraÎncă nu există evaluări
- Guion de Clase Analisis de La Respuesta TransitoriaDocument7 paginiGuion de Clase Analisis de La Respuesta TransitoriaAlex GoreÎncă nu există evaluări
- Método de Asignación de Polos y Regulador LinealDocument13 paginiMétodo de Asignación de Polos y Regulador LinealJosé Rubén Quitl RomeroÎncă nu există evaluări
- Modelado de Un Sistema de Control de PHDocument20 paginiModelado de Un Sistema de Control de PHPedro Manuel Rivera CalleÎncă nu există evaluări
- Funciones de Los DispositivosDocument9 paginiFunciones de Los DispositivosjjcanoolivaresÎncă nu există evaluări
- 0305-Construya El Secador Convencional Solar Parabolico PDFDocument8 pagini0305-Construya El Secador Convencional Solar Parabolico PDFAlvaro Luis Arango LondoñoÎncă nu există evaluări
- Informe de Practica5Document21 paginiInforme de Practica5Bryan Mdlo100% (1)
- Informe de Comunicaciones IndustrialesDocument33 paginiInforme de Comunicaciones Industrialesniklasselk100% (2)
- Lab4 Control2Document12 paginiLab4 Control2Romer BaltazarÎncă nu există evaluări
- Control Robusto y Sus AplicacionesDocument21 paginiControl Robusto y Sus AplicacionesRamiro Varas Fernandez50% (2)
- Taller N°8 Control de Una Planta Distribuidora de Cajas U OtrosDocument14 paginiTaller N°8 Control de Una Planta Distribuidora de Cajas U OtrosDominick Cruz EstebanÎncă nu există evaluări
- Control AutomáticoDocument70 paginiControl AutomáticoMarcos Schlegel100% (1)
- Sintonizadores de ControlDocument22 paginiSintonizadores de ControlJulian Gonzalez100% (1)
- Robotica Parcial 1Document82 paginiRobotica Parcial 1Raul SaenzÎncă nu există evaluări
- SIMULINKDocument15 paginiSIMULINKMario Felix MartinezÎncă nu există evaluări
- Operaciones Aritmeticas PLCDocument67 paginiOperaciones Aritmeticas PLCAnonymous J5T1RpfÎncă nu există evaluări
- Modelado de Un Motor de DC.Document3 paginiModelado de Un Motor de DC.Carlos Andrés Pérez Ramírez100% (1)
- Informe Instrumentación Industrial.Document17 paginiInforme Instrumentación Industrial.Ariel GálvezÎncă nu există evaluări
- Concepto de Asignación de PolosDocument6 paginiConcepto de Asignación de PolosClyo Alejandra VillalobosÎncă nu există evaluări
- Paper Planta de Tercer OrdenDocument4 paginiPaper Planta de Tercer Ordenleonidas314Încă nu există evaluări
- Control Automatico 2Document14 paginiControl Automatico 2SergioAugustoBaldeonÎncă nu există evaluări
- Unidad 2 - Modelado MatemáticoDocument30 paginiUnidad 2 - Modelado Matemáticoangel9021Încă nu există evaluări
- Funcion de TransferenciaDocument5 paginiFuncion de TransferenciaAlejandra AgudeloÎncă nu există evaluări
- Diagrama de BloquesDocument29 paginiDiagrama de Bloquescaceresccp100% (3)
- Ess-Siho-Pr-014 - Proc de Trabaj Ensamble Bajante-Tapon-No SelectDocument60 paginiEss-Siho-Pr-014 - Proc de Trabaj Ensamble Bajante-Tapon-No SelecticepoloÎncă nu există evaluări
- ESS-SIHO-PR-001 Proc de Trabaj Proceso de Armado de Equipo de Presion y FondoDocument96 paginiESS-SIHO-PR-001 Proc de Trabaj Proceso de Armado de Equipo de Presion y FondoicepoloÎncă nu există evaluări
- ESS-SIHO-PR-022 - Proc de Trabaj DESINTALACION E INSTAL D ARBOLITODocument60 paginiESS-SIHO-PR-022 - Proc de Trabaj DESINTALACION E INSTAL D ARBOLITOicepoloÎncă nu există evaluări
- ESS-SIHO-PR-018 - Proc de Trabaj EXTRAER VALVULAS DE GASDocument60 paginiESS-SIHO-PR-018 - Proc de Trabaj EXTRAER VALVULAS DE GASicepoloÎncă nu există evaluări
- Ess-Siho-Pr-015 - Proc de Trabaj Asentar TaponDocument61 paginiEss-Siho-Pr-015 - Proc de Trabaj Asentar TaponicepoloÎncă nu există evaluări
- ESS-SIHO-PR-002 - Proc de Trabaj Abc DEL CHEQUEO MECANICODocument76 paginiESS-SIHO-PR-002 - Proc de Trabaj Abc DEL CHEQUEO MECANICOicepoloÎncă nu există evaluări
- ESS-SIHO-PR-006 - Proc de Trabaj LOCALIZAR PUNTA DE TUBERIADocument75 paginiESS-SIHO-PR-006 - Proc de Trabaj LOCALIZAR PUNTA DE TUBERIAicepoloÎncă nu există evaluări
- ESS-SIHO-PR-005 - Proc de Trabaj CAMBIO DE CAMISA A CAMISADocument79 paginiESS-SIHO-PR-005 - Proc de Trabaj CAMBIO DE CAMISA A CAMISAicepoloÎncă nu există evaluări
- SnubbingDocument50 paginiSnubbingicepoloÎncă nu există evaluări
- ESS-SIHO-PR-008 - Proc de Trabaj CIERRE DE CAMISA CON LLAVE TIPO BDocument72 paginiESS-SIHO-PR-008 - Proc de Trabaj CIERRE DE CAMISA CON LLAVE TIPO BicepoloÎncă nu există evaluări
- Sistema de CarreterasDocument7 paginiSistema de CarreterasicepoloÎncă nu există evaluări
- Daños en Instalaciones en Aguas BlancasDocument4 paginiDaños en Instalaciones en Aguas BlancasicepoloÎncă nu există evaluări
- Red Semantica Patologia de ProyectoDocument3 paginiRed Semantica Patologia de ProyectoicepoloÎncă nu există evaluări
- Cuadro Sinoptico Patologia de EjecucionDocument3 paginiCuadro Sinoptico Patologia de EjecucionicepoloÎncă nu există evaluări
- Plan para El Almacenamiento Prevención y Respuesta A DerramesDocument20 paginiPlan para El Almacenamiento Prevención y Respuesta A DerramesicepoloÎncă nu există evaluări
- Presentacion de AcueductosDocument12 paginiPresentacion de AcueductosicepoloÎncă nu există evaluări
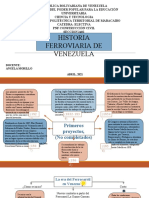
- Historia FerroviariaDocument6 paginiHistoria FerroviariaicepoloÎncă nu există evaluări
- Diseño SismorresistenteDocument8 paginiDiseño SismorresistenteicepoloÎncă nu există evaluări
- Procedimiento de Trabajo Seguro - Movimiento de TierrasDocument82 paginiProcedimiento de Trabajo Seguro - Movimiento de TierrasicepoloÎncă nu există evaluări
- Carta Notarial Conclusión de Contrato y Entrega de BienDocument2 paginiCarta Notarial Conclusión de Contrato y Entrega de BienRAFAEL100% (13)
- .00 N Copias/Acomp:: Cod. Digi-Balizacion: 0000007852-2017-ESC-JR-PEDocument6 pagini.00 N Copias/Acomp:: Cod. Digi-Balizacion: 0000007852-2017-ESC-JR-PEGimena CamposÎncă nu există evaluări
- Sander Vs España DemandaDocument6 paginiSander Vs España DemandaJoseph TorresÎncă nu există evaluări
- Cochabamba Nuevo Estatuto Country Club Cochabamba CCCDocument19 paginiCochabamba Nuevo Estatuto Country Club Cochabamba CCCLuis Carlos KinnÎncă nu există evaluări
- EnsayoDocument5 paginiEnsayohéctor ramirezÎncă nu există evaluări
- Alice IiiiDocument8 paginiAlice IiiiEdgarOrtaÎncă nu există evaluări
- C03119Document3 paginiC03119stefany camposÎncă nu există evaluări
- Normas Rectoras Del Derecho PenalDocument15 paginiNormas Rectoras Del Derecho PenalMerce C SCÎncă nu există evaluări
- Prestar AlimentosDocument8 paginiPrestar Alimentosanon_625460745Încă nu există evaluări
- Analisis Solucionu2Document10 paginiAnalisis Solucionu2NatAliaMaTamorosÎncă nu există evaluări
- CARTA NOTARIAL Oposicion de DomicilioDocument4 paginiCARTA NOTARIAL Oposicion de DomicilioJaime David Medina SantiagoÎncă nu există evaluări
- Solicitud de Hábeas CorpusDocument2 paginiSolicitud de Hábeas CorpusClientes UsuarioÎncă nu există evaluări
- Cuadro Comparativo Proceso Comun e Inmediato.Document2 paginiCuadro Comparativo Proceso Comun e Inmediato.Ricardo Garrido BlasÎncă nu există evaluări
- Redefiniendo El Derecho de Familia en La Tutela Del Vínculo Familiar PDFDocument19 paginiRedefiniendo El Derecho de Familia en La Tutela Del Vínculo Familiar PDFJose Ramos FloresÎncă nu există evaluări
- Codigo Civil Peruano Comentado - Tomo II - Derecho de Familia (Primera Parte)Document759 paginiCodigo Civil Peruano Comentado - Tomo II - Derecho de Familia (Primera Parte)escueladegobierno86% (77)
- LEY 20190 Crea Las SpADocument56 paginiLEY 20190 Crea Las SpAFelipe AlcérrecaÎncă nu există evaluări
- Interpretacion JuridicaDocument21 paginiInterpretacion JuridicapolariscoreasurÎncă nu există evaluări
- Principios PresupuestariosDocument77 paginiPrincipios PresupuestariosRocio Anabel Soncco Champi100% (2)
- Termino de Ralacion LaboralDocument80 paginiTermino de Ralacion LaboralJorge NietoÎncă nu există evaluări
- Ejemplo de Estatutos para Una Asociación DeportivaDocument11 paginiEjemplo de Estatutos para Una Asociación DeportivaSilvia MarcoÎncă nu există evaluări
- El Amparo de Legalidad en Costa RicaDocument167 paginiEl Amparo de Legalidad en Costa RicaMariela Fernández González93% (15)
- Tema 27 Juicio VerbalDocument11 paginiTema 27 Juicio Verbalkabala2011100% (1)
- Apunte Bienes. AbuslemeyPintoDocument54 paginiApunte Bienes. AbuslemeyPintoAbusleme Pinto InterrogadoresÎncă nu există evaluări
- PRACTICA No.11 Grupo Laboratorio No.3-Conservacion de La Energia MecanicaDocument10 paginiPRACTICA No.11 Grupo Laboratorio No.3-Conservacion de La Energia MecanicaYasminGarcesCaceres100% (1)
- 2.4 Requisitos Administrativos de Los Documentos 2.5 Registro de Papentes, Marca, Propiedad y Diseño IndustrialDocument59 pagini2.4 Requisitos Administrativos de Los Documentos 2.5 Registro de Papentes, Marca, Propiedad y Diseño IndustrialAna Briseno OrdazÎncă nu există evaluări
- Nacot 2018Document28 paginiNacot 2018Amy HenriquezÎncă nu există evaluări
- Bases Fundamentales Del ContratoDocument17 paginiBases Fundamentales Del ContratoFranklin Gonzales RamirezÎncă nu există evaluări
- Ponencia Drjavier SchmilinskyDocument13 paginiPonencia Drjavier Schmilinskypav61lazaroÎncă nu există evaluări
- Modulo 1Document19 paginiModulo 1Romy BrontÎncă nu există evaluări
- Presupuesto GeneralidadesDocument9 paginiPresupuesto GeneralidadesPerla CaceresÎncă nu există evaluări