S-ar putea să vă placă și
- Hyundai - Blue Print Tech Article EPS Part1Document4 paginiHyundai - Blue Print Tech Article EPS Part1Ahmed I. EltaherÎncă nu există evaluări
- BLDCDocument25 paginiBLDCSairam Sai33% (3)
- Starting and Speed Control of 3 Phase Induction MotorDocument38 paginiStarting and Speed Control of 3 Phase Induction MotorSree ShobhaÎncă nu există evaluări
- Stepper MotorDocument26 paginiStepper MotorSupriya Rakshit100% (1)
- Instuctions To Build A Magnet Motor Generator For Under $200Document14 paginiInstuctions To Build A Magnet Motor Generator For Under $200itux89% (9)
- Three Phase Induction Motor Interview Questions 2 1Document24 paginiThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- Special Electrical Machines Ee2403 PDFDocument16 paginiSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Minimization of Starting Torque and Inrush Current of Induction Motor by Different Starting Methods Using MATLAB SIMULINKDocument6 paginiMinimization of Starting Torque and Inrush Current of Induction Motor by Different Starting Methods Using MATLAB SIMULINKEditor IJTSRDÎncă nu există evaluări
- Selection of MotorsDocument51 paginiSelection of MotorsGohar GujjarÎncă nu există evaluări
- Starting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarDocument5 paginiStarting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarBhavik PrajapatiÎncă nu există evaluări
- Induction Motor: Working Principle, Types, &Document6 paginiInduction Motor: Working Principle, Types, &0409piyushÎncă nu există evaluări
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 paginiElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraÎncă nu există evaluări
- ABB OEM Instrument Transformer ReferenceDocument71 paginiABB OEM Instrument Transformer ReferenceAlbert Tuazon100% (1)
- Electric MotorDocument20 paginiElectric MotorthisisjineshÎncă nu există evaluări
- Study of a reluctance magnetic gearbox for energy storage system applicationDe la EverandStudy of a reluctance magnetic gearbox for energy storage system applicationEvaluare: 1 din 5 stele1/5 (1)
- A New Soft Starting Method For Wound-Rotor Induction MotorDocument6 paginiA New Soft Starting Method For Wound-Rotor Induction MotorRoron WicaksonoÎncă nu există evaluări
- Proposed Scheme For Plugging Three-Phase Induction Motor: January 2010Document6 paginiProposed Scheme For Plugging Three-Phase Induction Motor: January 2010Bilal HBÎncă nu există evaluări
- R.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, EgyptDocument5 paginiR.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, Egyptmarcelo_oliveira_limaÎncă nu există evaluări
- Analysis of Different Starting Methods of Induction Motor Ijariie4421Document11 paginiAnalysis of Different Starting Methods of Induction Motor Ijariie4421MADAO sanÎncă nu există evaluări
- CSPDocument8 paginiCSPmeghraj01100% (1)
- Electrical Machines II AnswerDocument24 paginiElectrical Machines II AnswerGurulathan SoosairajÎncă nu există evaluări
- EE6504EMII2018Document192 paginiEE6504EMII2018SOUGATA MAJIÎncă nu există evaluări
- AC 3 Phase Induction MotorsDocument10 paginiAC 3 Phase Induction MotorsTuhin HandaÎncă nu există evaluări
- Capacitor Start/Run Induction Motor: ExperimentDocument9 paginiCapacitor Start/Run Induction Motor: ExperimentMarcos Roberto ReinertÎncă nu există evaluări
- Working Applications of Direct Current DC Shunt MotorDocument2 paginiWorking Applications of Direct Current DC Shunt Motorfahad pirzadaÎncă nu există evaluări
- 6-Review On Basic Concepts-26-02-2024Document45 pagini6-Review On Basic Concepts-26-02-2024AYUSH GOYALÎncă nu există evaluări
- Demostracion de Arranque Por Inversion de Polaridad PDFDocument3 paginiDemostracion de Arranque Por Inversion de Polaridad PDFAlejandro Roldan MolinaÎncă nu există evaluări
- Induction Motors - EDC - Scherbius DriveDocument45 paginiInduction Motors - EDC - Scherbius DriveDivya JagwaniÎncă nu există evaluări
- Energy-Saving Methods of Operating Asynchronous MotorsDocument3 paginiEnergy-Saving Methods of Operating Asynchronous MotorsResearch ParkÎncă nu există evaluări
- Automatic Star Delta StarterDocument12 paginiAutomatic Star Delta StarterMahmoudÎncă nu există evaluări
- KBP Ic 5Document7 paginiKBP Ic 5aceel fitchÎncă nu există evaluări
- Leakage Current and Common Mode Voltage Issues in Modern AC Drive SystemsDocument8 paginiLeakage Current and Common Mode Voltage Issues in Modern AC Drive SystemsishakÎncă nu există evaluări
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pagini3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetÎncă nu există evaluări
- Variable Rotor-Resistance Control of Wind Turbine GeneratorsDocument6 paginiVariable Rotor-Resistance Control of Wind Turbine Generatorssamatar AbdiÎncă nu există evaluări
- Generator Motor Starting (Mltiquip)Document13 paginiGenerator Motor Starting (Mltiquip)Marcos C I SÎncă nu există evaluări
- Eto Question No.4Document3 paginiEto Question No.4kidanemariam teseraÎncă nu există evaluări
- Automatic Star Delta StarterDocument12 paginiAutomatic Star Delta StarterSivasakthivel Kaliappa GoundarÎncă nu există evaluări
- Module 3: Induction Motor Drives: SyllabusDocument8 paginiModule 3: Induction Motor Drives: SyllabusManoj SkÎncă nu există evaluări
- Induction Motor Working Principle Types PDFDocument6 paginiInduction Motor Working Principle Types PDFdumpyÎncă nu există evaluări
- Synchronous Machine Testing With ALL-TEST InstrumentDocument7 paginiSynchronous Machine Testing With ALL-TEST InstrumentENRIQUEÎncă nu există evaluări
- Pembangkitan Energi ListrikDocument5 paginiPembangkitan Energi ListrikDanang TriÎncă nu există evaluări
- Optimal and Economic Selection of Turn Ratio For Unit Transformer Using Generator Capability Curves of Synchronous GeneratorsDocument15 paginiOptimal and Economic Selection of Turn Ratio For Unit Transformer Using Generator Capability Curves of Synchronous GeneratorsJone JonathanÎncă nu există evaluări
- Kolodziej JamesDocument49 paginiKolodziej JamesPradeep RajasekeranÎncă nu există evaluări
- Contoh ETAP 2Document6 paginiContoh ETAP 2Ken Rama AdityoÎncă nu există evaluări
- Starting Method of 3-Phase Induction MotorDocument4 paginiStarting Method of 3-Phase Induction MotorRajith Gamage100% (2)
- Literature Review Induction MotorDocument4 paginiLiterature Review Induction Motoraflshftaf100% (1)
- Effect of Short Circuited DC Link Capacitor of An AC-DC-AC Inverter On The Performance of Induction MotorDocument8 paginiEffect of Short Circuited DC Link Capacitor of An AC-DC-AC Inverter On The Performance of Induction MotorOSAMAÎncă nu există evaluări
- TJE Miller Design of SRMDocument13 paginiTJE Miller Design of SRMmanasrinuÎncă nu există evaluări
- Performance Analysis and Control of A Capacitor Start Induction MotorDocument4 paginiPerformance Analysis and Control of A Capacitor Start Induction MotorIJRASETPublicationsÎncă nu există evaluări
- Proposed Scheme For Plugging Three-Phase Induction Motor: Haroutuon A. Hairik, Wissam A. KadhemDocument5 paginiProposed Scheme For Plugging Three-Phase Induction Motor: Haroutuon A. Hairik, Wissam A. KadhemBilal HBÎncă nu există evaluări
- Full Updated Electrical Machines 2 New Module - 2018Document61 paginiFull Updated Electrical Machines 2 New Module - 2018Didar MiaÎncă nu există evaluări
- محاضرات ماشيين من بعد الميدDocument93 paginiمحاضرات ماشيين من بعد الميدHamada WaelÎncă nu există evaluări
- Performance Analysis of Synchronous Reluctance GeneratorDocument12 paginiPerformance Analysis of Synchronous Reluctance GeneratorIJRASETPublicationsÎncă nu există evaluări
- Reaction PaperDocument6 paginiReaction PaperAngelo Escoro Dante100% (1)
- Research Paper On Single Phase Induction MotorDocument7 paginiResearch Paper On Single Phase Induction Motorgw15ws8j100% (1)
- Comparing The Performance of Induction MDocument9 paginiComparing The Performance of Induction MIraqi stormÎncă nu există evaluări
- Shared External Driver For VHF Converter With A Synchronous Rectifier Based On Matching Network Parameters OptimizationDocument11 paginiShared External Driver For VHF Converter With A Synchronous Rectifier Based On Matching Network Parameters OptimizationCP StudioÎncă nu există evaluări
- Induction Synchronous MotorsDocument35 paginiInduction Synchronous MotorsDeandre LaingÎncă nu există evaluări
- MOSFET Gate Drive Circuit Design Considerations For Integrated High Switching Frequency Buck ConverterDocument7 paginiMOSFET Gate Drive Circuit Design Considerations For Integrated High Switching Frequency Buck ConverterSergey RosenfeldÎncă nu există evaluări
- The Proceedings of The Institution of Electrical Engineers: December 1962Document9 paginiThe Proceedings of The Institution of Electrical Engineers: December 1962DEEPTHI NAIRÎncă nu există evaluări
- Chapter One: 1.1 What Are Dewatering Pumps?Document22 paginiChapter One: 1.1 What Are Dewatering Pumps?Odejobi Oluseyi JonathanÎncă nu există evaluări
- Methods of Starting Synchronus MotorsDocument15 paginiMethods of Starting Synchronus MotorsRahul KusumaÎncă nu există evaluări
- Starting Methods of Induction MotorsDocument5 paginiStarting Methods of Induction MotorsRiyah_Rae86% (7)
- Single Phase Induction Motors Single Phase Induction Motors Inductor CapacitorDocument6 paginiSingle Phase Induction Motors Single Phase Induction Motors Inductor CapacitoragreykatoÎncă nu există evaluări
- Starting High Inertia LoadsDocument9 paginiStarting High Inertia LoadsviswajdÎncă nu există evaluări
- Speed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationDocument6 paginiSpeed Control of 3-Phase Induction Motor Using Volt/hertz Control For Automotive ApplicationPrabhat KarnÎncă nu există evaluări
- Ejercicios P&IDDocument1 paginăEjercicios P&IDIsaac Alexis RiveraÎncă nu există evaluări
- Horario 192Document2 paginiHorario 192Isaac Alexis RiveraÎncă nu există evaluări
- HORARIOVERANODocument1 paginăHORARIOVERANOIsaac Alexis RiveraÎncă nu există evaluări
- Mecanica DE Fluidos Mecanica DE Fluidos SalsuniDocument1 paginăMecanica DE Fluidos Mecanica DE Fluidos SalsuniIsaac Alexis RiveraÎncă nu există evaluări
- 40 RealDocument6 pagini40 RealRenzo Diaz DelgadoÎncă nu există evaluări
- ArDocument2 paginiArIsaac Alexis RiveraÎncă nu există evaluări
- VBMB 13aDocument45 paginiVBMB 13avasanthavananÎncă nu există evaluări
- UNIT-V-Synchronous MachinesDocument51 paginiUNIT-V-Synchronous Machinessujith100% (1)
- Carunaiselvane Day1Document83 paginiCarunaiselvane Day1Aymen KammounÎncă nu există evaluări
- Type CVC-150 Combined Transformer: 25 KV, 150 KV BIL, OutdoorDocument4 paginiType CVC-150 Combined Transformer: 25 KV, 150 KV BIL, OutdoorjairojamaicaÎncă nu există evaluări
- 1 Single-Phase Motor 2020Document22 pagini1 Single-Phase Motor 2020SerajÎncă nu există evaluări
- Ef Report GRP 4Document23 paginiEf Report GRP 4Wakwkaka JssjaaÎncă nu există evaluări
- Assignment 1 DriveDocument3 paginiAssignment 1 DriveswamÎncă nu există evaluări
- Permanent Magnet Stepper MotorsDocument3 paginiPermanent Magnet Stepper MotorsMuhammad Rizwan AslamÎncă nu există evaluări
- Ac Motor Basics Level 1Document16 paginiAc Motor Basics Level 1Cris VillarÎncă nu există evaluări
- Resolver RE15 - 21 - 03 - 02Document8 paginiResolver RE15 - 21 - 03 - 02Gonzalo RiosÎncă nu există evaluări
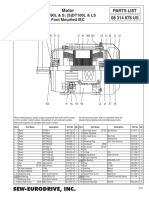
- Sew-Eurodrive, Inc.: MotorDocument1 paginăSew-Eurodrive, Inc.: MotorcmaradiagaÎncă nu există evaluări
- Lecture Plan (Winter Semester 2021 - 2022) Subject: Eec 204 (Dc4) - Electrical Machines-IDocument2 paginiLecture Plan (Winter Semester 2021 - 2022) Subject: Eec 204 (Dc4) - Electrical Machines-IAyush KulriaÎncă nu există evaluări
- Advantages and Disadvantages of Stepper MotorsDocument1 paginăAdvantages and Disadvantages of Stepper MotorsSyuhadah RashidÎncă nu există evaluări
- Can Stack Stepper Motors 35L048B: Ø 35 MM - Rohs Compliant - 28 MNMDocument1 paginăCan Stack Stepper Motors 35L048B: Ø 35 MM - Rohs Compliant - 28 MNMCem DurmazÎncă nu există evaluări
- DC MachineDocument60 paginiDC MachineNebyou DanielÎncă nu există evaluări
- 120 Top Most Single Phase Induction Motors PDFDocument19 pagini120 Top Most Single Phase Induction Motors PDFArunabh BhattacharyaÎncă nu există evaluări
- Draw An Elementary GeneratorDocument4 paginiDraw An Elementary GeneratorSam CalucagÎncă nu există evaluări
- BLDC ReportDocument8 paginiBLDC ReportJoe BinghamÎncă nu există evaluări
- Ee6351 Electrical Drives and Control 2 MDocument40 paginiEe6351 Electrical Drives and Control 2 Mbekalu tarekegnÎncă nu există evaluări
- F935113MDocument2 paginiF935113MnpÎncă nu există evaluări
- Tutorial 7 Synchronous MachinesDocument2 paginiTutorial 7 Synchronous MachinesSyed Azziz0% (1)
- MOCatalogDocument156 paginiMOCatalogFranCanavÎncă nu există evaluări