S-ar putea să vă placă și
- M.A Date SheetDocument5 paginiM.A Date SheetMuzaffar Mahmood KasanaÎncă nu există evaluări
- Earned Leave Requests S# Epi # Name Designation Division LeaveDocument10 paginiEarned Leave Requests S# Epi # Name Designation Division LeaveHammadAlviÎncă nu există evaluări
- 2 Synchronverter 19jan 2018Document14 pagini2 Synchronverter 19jan 2018HammadAlviÎncă nu există evaluări
- Earned Leave Requests S# Epi # Name Designation Division LeaveDocument10 paginiEarned Leave Requests S# Epi # Name Designation Division LeaveHammadAlviÎncă nu există evaluări
- 1 I. Romijn ECN Solar Cell OverviewDocument28 pagini1 I. Romijn ECN Solar Cell OverviewHammadAlviÎncă nu există evaluări
- 48v Box InputDocument2 pagini48v Box InputHammadAlviÎncă nu există evaluări
- 31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)Document81 pagini31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)HammadAlviÎncă nu există evaluări
- Poised For: Detection and HandshakesDocument4 paginiPoised For: Detection and HandshakesHammadAlviÎncă nu există evaluări
- Carrier and Bit Synchronization in Data CommunicationDocument15 paginiCarrier and Bit Synchronization in Data CommunicationmnotcoolÎncă nu există evaluări
- Dismantling BOQDocument80 paginiDismantling BOQHammadAlviÎncă nu există evaluări
- MISCDocument4 paginiMISCHammadAlviÎncă nu există evaluări
- Site/Equipment Audit Report: No. Description Result RemarksDocument2 paginiSite/Equipment Audit Report: No. Description Result RemarksHammadAlviÎncă nu există evaluări
- CW ATP Document V2.1Document4 paginiCW ATP Document V2.1HammadAlviÎncă nu există evaluări
- DrsDocument12 paginiDrsHammadAlviÎncă nu există evaluări
- English Composition by VUDocument234 paginiEnglish Composition by VUThe CSS Point100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Laser Light Cable (LLK-B) Spare Parts CatalogDocument6 paginiLaser Light Cable (LLK-B) Spare Parts CatalogBuentello B GonzalezÎncă nu există evaluări
- PSEN Ma1 4p-50 Operat Manual 22126-EN-06Document21 paginiPSEN Ma1 4p-50 Operat Manual 22126-EN-06Doganay KalguÎncă nu există evaluări
- C05-Ye41-Q-7859 - 1 - PS1, Emg-Ff Building, Below - Above Ground Earthing and Location of Lugs Layout, Section Details, SHT 4of4Document1 paginăC05-Ye41-Q-7859 - 1 - PS1, Emg-Ff Building, Below - Above Ground Earthing and Location of Lugs Layout, Section Details, SHT 4of4sartajÎncă nu există evaluări
- Virtual Feeder Segregation Using IIoT and Cloud TechnologiesDocument7 paginiVirtual Feeder Segregation Using IIoT and Cloud Technologiespjgandhi100% (2)
- Physics Investigatory ProjectDocument15 paginiPhysics Investigatory Projecttdycfgjdyjf82% (11)
- P 3 U 30Document120 paginiP 3 U 30ArcoolÎncă nu există evaluări
- PHY-101 - Applied OpticsDocument2 paginiPHY-101 - Applied Opticspriyanshi mishraÎncă nu există evaluări
- L-15 Solved Numericals On DC MotorDocument2 paginiL-15 Solved Numericals On DC MotorBSNL TRANSMISSION kathuaÎncă nu există evaluări
- Physics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Document183 paginiPhysics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Manthan ChakrabortyÎncă nu există evaluări
- Simple Agelesss Methods For Field Testing Power TransformersDocument13 paginiSimple Agelesss Methods For Field Testing Power Transformersraza239Încă nu există evaluări
- 04-Electrical Equipment ModuleDocument3 pagini04-Electrical Equipment ModuleSayed AbbasÎncă nu există evaluări
- 2mbi50n 060Document5 pagini2mbi50n 060ELy DarmawanÎncă nu există evaluări
- Synchronous Machines3Document103 paginiSynchronous Machines3Daniela CastroÎncă nu există evaluări
- 19eee114 Lab4Document3 pagini19eee114 Lab4Surya MurugesanÎncă nu există evaluări
- Rotor Earth Fault Protection of GeneratorDocument31 paginiRotor Earth Fault Protection of GeneratorRoger IlachoqueÎncă nu există evaluări
- Metal Cutting SourceDocument24 paginiMetal Cutting SourceSamÎncă nu există evaluări
- M7A39v1.4 B350M GAMING PRO Placa Baza PC IonutDocument21 paginiM7A39v1.4 B350M GAMING PRO Placa Baza PC IonutdjbobyÎncă nu există evaluări
- Feedback Amplifiers Theory and Design PDFDocument2 paginiFeedback Amplifiers Theory and Design PDFMikeÎncă nu există evaluări
- 42LS3450, 345S, 345TDocument53 pagini42LS3450, 345S, 345TAndres Fermin OchoaÎncă nu există evaluări
- Re NR 67370001Document7 paginiRe NR 67370001Mauro PerezÎncă nu există evaluări
- EHVACDocument60 paginiEHVACanjanivedÎncă nu există evaluări
- XFX 750W Black Edition PSU Modular True Power Power SupplyDocument5 paginiXFX 750W Black Edition PSU Modular True Power Power SupplyPenyelongkar KonspirasiÎncă nu există evaluări
- Introduction To Engineering Analysis 4th Edition Hagen Solutions Manual DownloadDocument66 paginiIntroduction To Engineering Analysis 4th Edition Hagen Solutions Manual DownloadDelores Cooper100% (23)
- Pressurisation Unit ScheduleDocument1 paginăPressurisation Unit ScheduleArmağan DemirelÎncă nu există evaluări
- Ra-1900 Ii2 Qi 1-0-0Document41 paginiRa-1900 Ii2 Qi 1-0-0Gustavo BessoneÎncă nu există evaluări
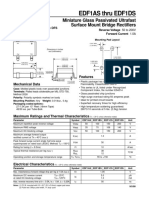
- EDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersDocument2 paginiEDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersCarlosÎncă nu există evaluări
- Dse402 Mkii Data SheetDocument2 paginiDse402 Mkii Data SheetyanÎncă nu există evaluări
- Atasheet en 201508 T58I-E-02 Rev3 2Document17 paginiAtasheet en 201508 T58I-E-02 Rev3 2deri mardiÎncă nu există evaluări
- FCC Tests Report Arris Tg862g TG 862ct-rDocument82 paginiFCC Tests Report Arris Tg862g TG 862ct-rHelp Poligran100% (2)
- IPFCDocument6 paginiIPFCsabarnadhkÎncă nu există evaluări