S-ar putea să vă placă și
- Sécurité Industrielle Cours Rached NciriDocument57 paginiSécurité Industrielle Cours Rached NciriJawher Salem67% (3)
- Mise en Place D'un Système de Management de La Qualité Au Sein de AFIF CHARITY - QATARDocument66 paginiMise en Place D'un Système de Management de La Qualité Au Sein de AFIF CHARITY - QATARYassine Mafrax100% (1)
- Guidage en Translation PDFDocument141 paginiGuidage en Translation PDFkharrat samir100% (1)
- Maison IntélligenteDocument75 paginiMaison IntélligenteJawher SalemÎncă nu există evaluări
- Le Zodiaque de Dendérah (Réparé)Document40 paginiLe Zodiaque de Dendérah (Réparé)marion100% (1)
- 293 Conception de La Commande de Processus PopescuDocument295 pagini293 Conception de La Commande de Processus PopescuSteve DemirelÎncă nu există evaluări
- Eval 3 Guidage en Rotation TOURET A MEULERDocument5 paginiEval 3 Guidage en Rotation TOURET A MEULERGaston 91Încă nu există evaluări
- Devoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineDocument8 paginiDevoir Corrigé de Contrôle N°3 - Génie Mécanique Touret A Meuler - 3ème Technique (2012-2013) MR Mlaouhi SlaheddineYoussef Cherni100% (1)
- Usinage Par Enlèvement de MatièreDocument11 paginiUsinage Par Enlèvement de MatièreMou Hamoudi100% (2)
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgDocument14 paginiPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- Mecanismes A CamesDocument4 paginiMecanismes A CamesPatrick MinkoÎncă nu există evaluări
- Pfe MaintenanceDocument67 paginiPfe MaintenanceJawher SalemÎncă nu există evaluări
- Dessin de DéfinitionDocument3 paginiDessin de DéfinitionkhocineÎncă nu există evaluări
- Étude Des Installations Électriques D'une MaisonDocument7 paginiÉtude Des Installations Électriques D'une MaisonJawher SalemÎncă nu există evaluări
- TD N2 AutomatismeDocument4 paginiTD N2 AutomatismeYouness Bakache100% (4)
- Tamiseur VibrantDocument120 paginiTamiseur VibrantJawher Salem75% (4)
- Meule À MainDocument2 paginiMeule À MainHamza 01100% (1)
- Etau A Serrage RapideDocument88 paginiEtau A Serrage RapideYounss Äýt100% (1)
- Dessin D'ens MotoréducteurDocument2 paginiDessin D'ens Motoréducteurmatozo75% (4)
- Bride de SerrageDocument3 paginiBride de SerrageSalah Dark100% (1)
- Inbound MarketingDocument13 paginiInbound MarketingPaweł SajdekÎncă nu există evaluări
- Etude AMDEC Et Mise en Place Du Planning PDFDocument108 paginiEtude AMDEC Et Mise en Place Du Planning PDFSoufiane100% (2)
- Exercice Sup Ajustements PRDocument2 paginiExercice Sup Ajustements PRMahfoud Natsu100% (1)
- Exercices Ajustements Lves PDFDocument6 paginiExercices Ajustements Lves PDFالقبطان القبطان100% (2)
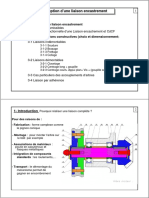
- Cours Liaison EncastrementDocument12 paginiCours Liaison Encastrementsou souÎncă nu există evaluări
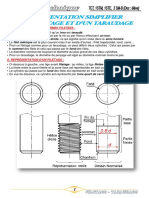
- Filetage Et Taraudage Cours PDFDocument4 paginiFiletage Et Taraudage Cours PDFnosilin100% (2)
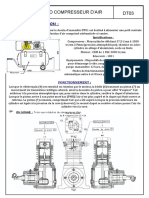
- TD CompresseurDocument11 paginiTD CompresseurSamba Sall100% (1)
- Exercices Ajustements - LvesDocument6 paginiExercices Ajustements - LvesNoureddine Hermetien33% (3)
- Contrat de Phase Final122226Document2 paginiContrat de Phase Final122226Nada Ghammem50% (2)
- Fonction AssemblageDocument32 paginiFonction AssemblageyahyaouiÎncă nu există evaluări
- Etude Et Conception D'une Centrale A BetonDocument60 paginiEtude Et Conception D'une Centrale A Betonjihenk100% (14)
- Chapitre 4 Les Contraintes DanterioriteDocument13 paginiChapitre 4 Les Contraintes DanterioriteTouhemi Ben Sadok100% (1)
- IntrusionDocument17 paginiIntrusionJawher SalemÎncă nu există evaluări
- Examen À Distance de TP MécaniqueDocument5 paginiExamen À Distance de TP MécaniqueFatima Zahra AmalouÎncă nu există evaluări
- I. Les Cames:: 1. DefinitionDocument6 paginiI. Les Cames:: 1. DefinitionYassine Hnada0% (1)
- Ve ReglableDocument27 paginiVe Reglableachaboy167% (3)
- 03 Vocabulaire MetrologiqueDocument14 pagini03 Vocabulaire MetrologiqueBouchedda YassineÎncă nu există evaluări
- TD6 Schéma Ciné Touret À MeulerDocument2 paginiTD6 Schéma Ciné Touret À MeulerHamza Elallam100% (7)
- Série D'exercices - Physique Chimie - 1ère As MR YoussefDocument2 paginiSérie D'exercices - Physique Chimie - 1ère As MR YoussefMed Brini100% (1)
- T.P 02 (V2) CorrigésDocument4 paginiT.P 02 (V2) CorrigésMrnadhir Mecanique100% (1)
- DevoirDocument4 paginiDevoirAnonymous ljWszRodq100% (1)
- Etude D'outillageDocument12 paginiEtude D'outillageDayang Dayang100% (3)
- 05 Fraiseuse UniverselleDocument15 pagini05 Fraiseuse UniverselleKereme JulienÎncă nu există evaluări
- TP Etau À Ventouse ProfDocument5 paginiTP Etau À Ventouse Profmidoun100% (2)
- Construction Des Arcs de RaccordementDocument4 paginiConstruction Des Arcs de RaccordementHamza NassibÎncă nu există evaluări
- 01 Tour ParalleleDocument7 pagini01 Tour ParallelekhocineÎncă nu există evaluări
- Roulement BCDocument6 paginiRoulement BCOtman OtoÎncă nu există evaluări
- Correspondance Des Vues Exercices 2Document3 paginiCorrespondance Des Vues Exercices 2akou100% (1)
- Corrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MDocument5 paginiCorrigé Du Devoir de Contrôle N°1 - Génie Mécanique Butée Reglable - 3ème Technique (2010-2011) MArfaoui Aymen100% (1)
- Gamme D Usinage de La Piece 2Document3 paginiGamme D Usinage de La Piece 2Med Amine HattakiÎncă nu există evaluări
- 04 Exercice CremaillereDocument1 pagină04 Exercice CremaillereAhmed Najjar100% (1)
- A25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesDocument1 paginăA25 Dessin Densemble Scie Sauteuse - Doc Eleve A Completer - Les CoupesStef TfhÎncă nu există evaluări
- Devoir de Controle N°2Document8 paginiDevoir de Controle N°2yves100% (2)
- Embrayage FreinDocument3 paginiEmbrayage FreinMoÎncă nu există evaluări
- Révision Engrenage 2020Document15 paginiRévision Engrenage 2020Yosr Ben SaidÎncă nu există evaluări
- DC1 1AS Casse Noix NOV 2020Document4 paginiDC1 1AS Casse Noix NOV 2020TarekMostapha50% (2)
- TP3 Borne Réglable sujet+MEP PDFDocument8 paginiTP3 Borne Réglable sujet+MEP PDFdiopÎncă nu există evaluări
- Embrayages Frein 10 11 12 PDFDocument7 paginiEmbrayages Frein 10 11 12 PDFmohamed1101100% (1)
- Pistolet D Arrosage CorrigeDocument3 paginiPistolet D Arrosage CorrigeMATOUMBA PAULINÎncă nu există evaluări
- Activité Sur Les Outils en Fraisage DevoirDocument5 paginiActivité Sur Les Outils en Fraisage Devoirmardochée tchobwé100% (1)
- Projection OrthoDocument4 paginiProjection OrthoTou MatwiÎncă nu există evaluări
- TD Limiteur de CoupleDocument2 paginiTD Limiteur de CoupleHamami Aymen100% (2)
- Devoir de Contrôle N°2 2013 2014 (Elamri)Document4 paginiDevoir de Contrôle N°2 2013 2014 (Elamri)imed50% (2)
- TD TRAIN EpicycloidalesDocument2 paginiTD TRAIN EpicycloidalesIlyas MhammediÎncă nu există evaluări
- TD Poulie CourroieDocument2 paginiTD Poulie CourroieAbdellah Faqdani100% (2)
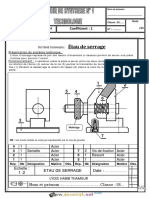
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDocument6 paginiDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecÎncă nu există evaluări
- 4-Mode D'action Des FraisesDocument3 pagini4-Mode D'action Des Fraisessb ali0% (1)
- SYSTÈME D ÉTUDE Fraiseuse AutomatiqueDocument10 paginiSYSTÈME D ÉTUDE Fraiseuse AutomatiqueMohammed BdrÎncă nu există evaluări
- TD 2 - AutomDocument2 paginiTD 2 - AutomYahiyaoui SofyaneÎncă nu există evaluări
- Page13 17Document7 paginiPage13 17Besbes ZiedÎncă nu există evaluări
- DEV3_SHEMA BAC F3Document3 paginiDEV3_SHEMA BAC F3Daouda OUEDRAOGOÎncă nu există evaluări
- Série 14 4ST NR 2024 GRAFCETDocument4 paginiSérie 14 4ST NR 2024 GRAFCETAbdelbasset Zaiech100% (1)
- evaluation Schéma BAC F3Document3 paginievaluation Schéma BAC F3Daouda OUEDRAOGOÎncă nu există evaluări
- DS1 2019-DTDocument5 paginiDS1 2019-DTMouad MemniÎncă nu există evaluări
- TD Analyse VibratoireDocument1 paginăTD Analyse VibratoireJawher Salem0% (1)
- SécuritéDocument30 paginiSécuritéJawher SalemÎncă nu există evaluări
- Chapitre N°1 Durée de VieDocument47 paginiChapitre N°1 Durée de VieJawher Salem100% (1)
- AMDEC and Analyse de Risque AMDEC and AnDocument35 paginiAMDEC and Analyse de Risque AMDEC and AnJawher SalemÎncă nu există evaluări
- FMD1 PDFDocument12 paginiFMD1 PDFJawher SalemÎncă nu există evaluări
- Exercice Analyse Des RisquesDocument4 paginiExercice Analyse Des RisquesJawher SalemÎncă nu există evaluări
- Deming IshikawaDocument6 paginiDeming IshikawaChadbraÎncă nu există evaluări
- Cablage Industriel Cabler Une Armoire Electrique Basse Tension PDFDocument3 paginiCablage Industriel Cabler Une Armoire Electrique Basse Tension PDFJawher Salem0% (1)
- FMD1 PDFDocument12 paginiFMD1 PDFJawher SalemÎncă nu există evaluări
- Définition de CintrageDocument2 paginiDéfinition de CintrageJawher SalemÎncă nu există evaluări
- Industrie4 0 PDFDocument68 paginiIndustrie4 0 PDFJawher SalemÎncă nu există evaluări
- Modc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementDocument57 paginiModc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementJawher SalemÎncă nu există evaluări
- 05 - Concept FMD - Introduction PDFDocument5 pagini05 - Concept FMD - Introduction PDFachrefchaabaniÎncă nu există evaluări
- Cablage Industriel Cabler Une Armoire Electrique Basse Tension PDFDocument3 paginiCablage Industriel Cabler Une Armoire Electrique Basse Tension PDFJawher Salem0% (1)
- Wikifab-Filtration Sur Sable Par ArduinoDocument7 paginiWikifab-Filtration Sur Sable Par ArduinoJawher SalemÎncă nu există evaluări
- Pfe Module XbeeDocument84 paginiPfe Module XbeeJawher SalemÎncă nu există evaluări
- Telecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Document3 paginiTelecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Jawher SalemÎncă nu există evaluări
- Cours - Physique Oscillations Électriques Forcées en Régime Sinusoïdal - Bac Technique (2012-2013) MR Daghsni Said PDFDocument4 paginiCours - Physique Oscillations Électriques Forcées en Régime Sinusoïdal - Bac Technique (2012-2013) MR Daghsni Said PDFJawher SalemÎncă nu există evaluări
- Touret À MeulerDocument11 paginiTouret À MeulerUday GokhaleÎncă nu există evaluări
- Siemens Step7 Manager Tutorial PDFDocument71 paginiSiemens Step7 Manager Tutorial PDFJawher SalemÎncă nu există evaluări
- EXA AutoDocument6 paginiEXA Autoقرين لطفيÎncă nu există evaluări
- Fiche EnseignantDocument4 paginiFiche EnseignantWulfaÎncă nu există evaluări
- NCT Memento Rinaldo v2Document15 paginiNCT Memento Rinaldo v2Manmzel RaphaÎncă nu există evaluări
- Programme Séminaire UCESIF Bucarest, 13 - 14 Mai 2013Document24 paginiProgramme Séminaire UCESIF Bucarest, 13 - 14 Mai 2013Victor CozmeiÎncă nu există evaluări
- Devoir M1 MathDocument1 paginăDevoir M1 MathSolene TsinaÎncă nu există evaluări
- Filtre A CartoucheDocument20 paginiFiltre A Cartouchenasser kamakenÎncă nu există evaluări
- Correction Emd MR 2017 2018Document4 paginiCorrection Emd MR 2017 2018Benlouanas KamelÎncă nu există evaluări
- Cours TGDocument45 paginiCours TGRadia GanaÎncă nu există evaluări
- Iso 14539Document42 paginiIso 14539David SouthgateÎncă nu există evaluări
- Weber Le Savant Et Le Politique (Annotations)Document1 paginăWeber Le Savant Et Le Politique (Annotations)bilou11070% (1)
- Corr td1 PDFDocument3 paginiCorr td1 PDFBlewoussiÎncă nu există evaluări
- Uca2 1 1aDocument3 paginiUca2 1 1aMarieÎncă nu există evaluări
- Voyage Du Jeune - Tome 3Document568 paginiVoyage Du Jeune - Tome 3Paula AranhaÎncă nu există evaluări
- Evaluation Des Gains Dans Les Systèmes de Communication OptiqueDocument35 paginiEvaluation Des Gains Dans Les Systèmes de Communication OptiqueMichel GwosÎncă nu există evaluări
- Draft Charte Graphique Pdl-145Document22 paginiDraft Charte Graphique Pdl-145damien batobaÎncă nu există evaluări
- Mini Projet UrbanismeDocument5 paginiMini Projet UrbanismeBadra Ali SanogoÎncă nu există evaluări
- Elasticité Chapitre 6Document21 paginiElasticité Chapitre 6Anis LepicÎncă nu există evaluări
- Que Faut - Il Retenir Sur Les Nombres Complexes PDFDocument2 paginiQue Faut - Il Retenir Sur Les Nombres Complexes PDFMichaël Ronio BezandryÎncă nu există evaluări
- MCC Ing Cycle Preparatoire IntegreeDocument2 paginiMCC Ing Cycle Preparatoire IntegreeNadia Ait AhmedÎncă nu există evaluări
- Glenn Murcutt - CompressedDocument12 paginiGlenn Murcutt - CompressedpianoÎncă nu există evaluări
- L3 TP JetDocument6 paginiL3 TP JetAmel HydÎncă nu există evaluări
- P2621v2analyse Des Surface Technique de L IngenieurDocument13 paginiP2621v2analyse Des Surface Technique de L IngenieursalimÎncă nu există evaluări
- Chapitre 5-Signature NumériqueDocument4 paginiChapitre 5-Signature NumériqueDO UAÎncă nu există evaluări
- Communiquer Communiquer: Figure 1: Deux Décompositions de La Tâche TDocument12 paginiCommuniquer Communiquer: Figure 1: Deux Décompositions de La Tâche The200gab100% (1)
- Cellule - Ultra - Cours PDFDocument6 paginiCellule - Ultra - Cours PDFAdaÎncă nu există evaluări