S-ar putea să vă placă și
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDe la EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysÎncă nu există evaluări
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsDe la EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsÎncă nu există evaluări
- Mme Toumi Imen Système Unité D'usinageDocument6 paginiMme Toumi Imen Système Unité D'usinageKamel TayahiÎncă nu există evaluări
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 paginiCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliÎncă nu există evaluări
- Devoir de Synthèse N°3Document6 paginiDevoir de Synthèse N°3Kamel Tayahi0% (1)
- 8c5mn-Poste Automatique de Decoupage de Marbre PDFDocument3 pagini8c5mn-Poste Automatique de Decoupage de Marbre PDFIbra MoulayÎncă nu există evaluări
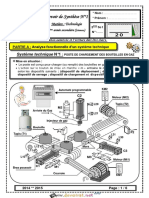
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiDocument6 paginiDevoir de Synthèse N°1 - Technologie - Poste Automatique de Perçage - 2ème Sciences (2016-2017) MR HammiamaniÎncă nu există evaluări
- Exercice Analyse Fonctionnlle Descendante eDocument2 paginiExercice Analyse Fonctionnlle Descendante eMed Le oi100% (1)
- DS1!12!13 4ST SOUSSE Complet Prod Pots MielDocument35 paginiDS1!12!13 4ST SOUSSE Complet Prod Pots Miellotfi75% (4)
- Malaxeur de Sable AutomatiseDocument9 paginiMalaxeur de Sable AutomatiseHamada HamadaÎncă nu există evaluări
- DS1 - DT - Cellule Flexible D'usinageDocument4 paginiDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- Exm2015-CorrigeDocument7 paginiExm2015-CorrigeToxic DEVÎncă nu există evaluări
- Exercice Chaine D'information Eleve PDFDocument3 paginiExercice Chaine D'information Eleve PDFIbra MoulayÎncă nu există evaluări
- DEVOIR DE SYNTHESE' 1ère SC 12 - 13Document5 paginiDEVOIR DE SYNTHESE' 1ère SC 12 - 13Jihen Dridi100% (1)
- Cours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorDocument10 paginiCours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorHana KhemissiÎncă nu există evaluări
- Devoir de Controle N1-2as-2022Document4 paginiDevoir de Controle N1-2as-2022GR GARMANI100% (2)
- Devoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneDocument6 paginiDevoir de Synthèse N°1 - Technologie - Antenne Telescopique - Poste Automatique de Remplissage Et de Fermeture de Paquets - 2ème Sciences (2016-2017) MR Zouhaier RihaneAbdelkader Zidane0% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 paginiDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Poste Automatique D Agrafage Et D Etiquetage Des Caisses en CartonDocument5 paginiPoste Automatique D Agrafage Et D Etiquetage Des Caisses en Cartongrand toto100% (1)
- TD 2 Automates Programmables Industriels 2020 - 2021Document2 paginiTD 2 Automates Programmables Industriels 2020 - 2021adamÎncă nu există evaluări
- DT - Système de Production Des Godets de YaourtDocument6 paginiDT - Système de Production Des Godets de YaourtIsmail Ezzine100% (1)
- 17 TransformationDocument10 pagini17 TransformationMohamed NaciriÎncă nu există evaluări
- Cours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFDocument8 paginiCours - Génie Mécanique - Schéma Cinématique Appui Réglable - 3ème Technique (2016-2017) MR ABIDI MOURAD PDFANDAHMOUÎncă nu există evaluări
- Devoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Document10 paginiDevoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Piere EbrahimÎncă nu există evaluări
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 paginiDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchÎncă nu există evaluări
- Série de TD N-1Document2 paginiSérie de TD N-1khaled kamel BouabdallahÎncă nu există evaluări
- Pliage Grafcet+LadderDocument7 paginiPliage Grafcet+LadderIlias EmsaÎncă nu există evaluări
- SciesauteusecorrectionDocument3 paginiSciesauteusecorrectionyumiÎncă nu există evaluări
- DTDocument6 paginiDTAnonymous ljWszRodq71% (7)
- Devoir de Synthèse N°1 - Technologie POSTE AUTOMATIQUE DE FRAISAGE ET PERÇAGE - 2ème Sciences (2011-2012) MR Boubaker Hassen PDFDocument7 paginiDevoir de Synthèse N°1 - Technologie POSTE AUTOMATIQUE DE FRAISAGE ET PERÇAGE - 2ème Sciences (2011-2012) MR Boubaker Hassen PDFIbra Moulay100% (2)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesDocument6 paginiDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesLassaad HamdiÎncă nu există evaluări
- Devoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI RaoufDocument8 paginiDevoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI Raoufimed100% (3)
- Systeme de PercageDocument1 paginăSysteme de PercageRedaAbdraouf100% (1)
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2010-2011) MR KrikidDocument7 paginiDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2010-2011) MR Krikidأبوأحمد الجزيري100% (2)
- dc2 3tech 2011 2012Document7 paginidc2 3tech 2011 2012Bouabdellaoui saif ennasrÎncă nu există evaluări
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleDocument6 paginiContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriÎncă nu există evaluări
- Devoir de Contrôle N°1 - Technologie - Machine À Coller Les Étiquettes - 2ème Sciences (2018-2019) MR Dhifaoui AbdelwahebDocument4 paginiDevoir de Contrôle N°1 - Technologie - Machine À Coller Les Étiquettes - 2ème Sciences (2018-2019) MR Dhifaoui Abdelwahebelyes mleykiÎncă nu există evaluări
- Grafcet 2 ASDocument10 paginiGrafcet 2 AShammamin2008Încă nu există evaluări
- Devoir de Contrôle N°2 - Technologie - 2ème Sciences (2012-2013) MR Abdallah Raouafi PDFDocument2 paginiDevoir de Contrôle N°2 - Technologie - 2ème Sciences (2012-2013) MR Abdallah Raouafi PDFchida Oussama100% (1)
- Systeme de Percage Et de LamageDocument2 paginiSysteme de Percage Et de LamageWalid Fattoum100% (1)
- 01 Tour ParalleleDocument7 pagini01 Tour ParallelekhocineÎncă nu există evaluări
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFDocument3 paginiDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) 2 PDFأبوأحمد الجزيريÎncă nu există evaluări
- Ds2-2ème-Pot de Fleurs 2020-2021Document10 paginiDs2-2ème-Pot de Fleurs 2020-2021Adam BensaidÎncă nu există evaluări
- Devoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFDocument4 paginiDevoir de Contrôle N°1 - Génie Électrique - Bac Technique (2010-2011) MR Abdallah Raouafi PDFAkram Ben Khemis50% (2)
- Seie 4 Grafcet 3emeDocument3 paginiSeie 4 Grafcet 3emeSoumeya MachtaÎncă nu există evaluări
- Capteur PneumatiqueDocument6 paginiCapteur Pneumatiquemom bakkouch100% (1)
- TD Verin Simple Effet eDocument5 paginiTD Verin Simple Effet eBenmeddour Omar100% (1)
- Présentation Du SujetDocument2 paginiPrésentation Du SujetMohsen Saidi100% (1)
- 1A Devoir de Synthèse N°2 - TM 2014Document6 pagini1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiÎncă nu există evaluări
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiDocument6 paginiDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiMeriem AbdelhafidhÎncă nu există evaluări
- Monte ChargeDocument9 paginiMonte ChargeSaid BennayaÎncă nu există evaluări
- C26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeDocument5 paginiC26 Document Eleve - TP Application - Liaisons Et Schema Cinematique - Etau ModelismeStef TfhÎncă nu există evaluări
- Fascicule de TP CAO FAO MécaniqueDocument47 paginiFascicule de TP CAO FAO MécaniqueGadaHaddad100% (1)
- Devoir1 Controle2 4stDocument8 paginiDevoir1 Controle2 4stabou02100% (1)
- DS11 2017 - 2018Document8 paginiDS11 2017 - 2018Ridha Manaa100% (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.De la EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Încă nu există evaluări
- 5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1Document58 pagini5 Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D Exercice 1ademgassoumikiaÎncă nu există evaluări
- 1tronconneuse AutomatiqueDocument40 pagini1tronconneuse Automatique2ste3100% (1)
- Tronconneuse AutomatiqueDocument67 paginiTronconneuse AutomatiqueMarcelin BouadouÎncă nu există evaluări
- 1tronconneuse - Automatique ImpDocument8 pagini1tronconneuse - Automatique ImpYoussef SadikÎncă nu există evaluări
- Deming IshikawaDocument6 paginiDeming IshikawaChadbraÎncă nu există evaluări
- Chapitre N°1 Durée de VieDocument47 paginiChapitre N°1 Durée de VieJawher Salem100% (1)
- AMDEC and Analyse de Risque AMDEC and AnDocument35 paginiAMDEC and Analyse de Risque AMDEC and AnJawher SalemÎncă nu există evaluări
- SécuritéDocument30 paginiSécuritéJawher SalemÎncă nu există evaluări
- Exercice Analyse Des RisquesDocument4 paginiExercice Analyse Des RisquesJawher Salem100% (1)
- TD Analyse VibratoireDocument1 paginăTD Analyse VibratoireJawher Salem0% (1)
- Industrie4 0 PDFDocument68 paginiIndustrie4 0 PDFJawher SalemÎncă nu există evaluări
- FMD1 PDFDocument12 paginiFMD1 PDFJawher SalemÎncă nu există evaluări
- Tamiseur VibrantDocument120 paginiTamiseur VibrantJawher Salem75% (4)
- Etude AMDEC Et Mise en Place Du Planning PDFDocument108 paginiEtude AMDEC Et Mise en Place Du Planning PDFSoufiane100% (2)
- FMD1 PDFDocument12 paginiFMD1 PDFJawher SalemÎncă nu există evaluări
- Sécurité Industrielle Cours Rached NciriDocument57 paginiSécurité Industrielle Cours Rached NciriJawher Salem67% (3)
- Série D'exercices - Physique Chimie - 1ère As MR YoussefDocument2 paginiSérie D'exercices - Physique Chimie - 1ère As MR YoussefMed Brini100% (1)
- Définition de CintrageDocument2 paginiDéfinition de CintrageJawher Salem100% (1)
- Mise en Place D'un Système de Management de La Qualité Au Sein de AFIF CHARITY - QATARDocument66 paginiMise en Place D'un Système de Management de La Qualité Au Sein de AFIF CHARITY - QATARYassine Mafrax100% (1)
- Modc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementDocument57 paginiModc3a9lisation Et Amc3a9lioration de Performance D - Une Poste de RegroupementJawher SalemÎncă nu există evaluări
- 05 - Concept FMD - Introduction PDFDocument5 pagini05 - Concept FMD - Introduction PDFachrefchaabaniÎncă nu există evaluări
- Pfe MaintenanceDocument67 paginiPfe MaintenanceJawher SalemÎncă nu există evaluări
- Cablage Industriel Cabler Une Armoire Electrique Basse Tension PDFDocument3 paginiCablage Industriel Cabler Une Armoire Electrique Basse Tension PDFJawher Salem0% (1)
- Telecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Document3 paginiTelecharger Gratuit CoursExercices - Com Arduino BalanceDFRobotSENO160.PDF 309Jawher SalemÎncă nu există evaluări
- Cours - Physique Oscillations Électriques Forcées en Régime Sinusoïdal - Bac Technique (2012-2013) MR Daghsni Said PDFDocument4 paginiCours - Physique Oscillations Électriques Forcées en Régime Sinusoïdal - Bac Technique (2012-2013) MR Daghsni Said PDFJawher SalemÎncă nu există evaluări
- Maison IntélligenteDocument75 paginiMaison IntélligenteJawher SalemÎncă nu există evaluări
- Cablage Industriel Cabler Une Armoire Electrique Basse Tension PDFDocument3 paginiCablage Industriel Cabler Une Armoire Electrique Basse Tension PDFJawher Salem0% (1)
- Pfe Module XbeeDocument84 paginiPfe Module XbeeJawher SalemÎncă nu există evaluări
- IntrusionDocument17 paginiIntrusionJawher SalemÎncă nu există evaluări
- Wikifab-Filtration Sur Sable Par ArduinoDocument7 paginiWikifab-Filtration Sur Sable Par ArduinoJawher SalemÎncă nu există evaluări
- Siemens Step7 Manager Tutorial PDFDocument71 paginiSiemens Step7 Manager Tutorial PDFJawher SalemÎncă nu există evaluări
- Touret À MeulerDocument11 paginiTouret À MeulerUday GokhaleÎncă nu există evaluări
- Étude Des Installations Électriques D'une MaisonDocument7 paginiÉtude Des Installations Électriques D'une MaisonJawher SalemÎncă nu există evaluări
- LC 22-001Document7 paginiLC 22-001Simon Houde100% (2)
- Controle 1 - 4 S1 PC 1bac FRDocument3 paginiControle 1 - 4 S1 PC 1bac FRbrinimed06gmail.comÎncă nu există evaluări
- Mem Corr AndriantavyDocument66 paginiMem Corr AndriantavyWael TrabelsiÎncă nu există evaluări
- Cours Systemes de Transmission de MouvementDocument5 paginiCours Systemes de Transmission de MouvementdjalikadjouÎncă nu există evaluări
- Techniques de ClimatisationDocument27 paginiTechniques de ClimatisationMohamud Lhaf100% (1)
- Macro ImportDocument29 paginiMacro ImportKamil ChamÎncă nu există evaluări
- Beer - Méthode de Clarinette (1891)Document60 paginiBeer - Méthode de Clarinette (1891)fabri21Încă nu există evaluări
- Joyeux Anniversaire Tab F - Partition Et PartiesDocument2 paginiJoyeux Anniversaire Tab F - Partition Et PartiesMartinÎncă nu există evaluări
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jDocument1 paginăADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DièneÎncă nu există evaluări
- CCNA 02 Introduction À l'IOSDocument138 paginiCCNA 02 Introduction À l'IOSyikhlefÎncă nu există evaluări
- Travaux Dirigés - TD - ArbresDocument2 paginiTravaux Dirigés - TD - Arbresلا إلٰه إلّا اللهÎncă nu există evaluări
- TP E P RedresseurDocument5 paginiTP E P RedresseurRafik BouhennacheÎncă nu există evaluări
- Ifr AttDocument9 paginiIfr AttpatrouilledeafranceÎncă nu există evaluări
- TD1 CorDocument9 paginiTD1 Coramine jodar100% (1)
- TP BDV 2016Document17 paginiTP BDV 2016Khabtane AbdelhamidÎncă nu există evaluări
- NPS - VPN Sous Windows2012 ServerDocument19 paginiNPS - VPN Sous Windows2012 ServerAKUEÎncă nu există evaluări
- Cours Matlab 2020Document55 paginiCours Matlab 2020soufianealjahid523Încă nu există evaluări
- TP 2 InstrumentationDocument6 paginiTP 2 Instrumentationrami kafiÎncă nu există evaluări
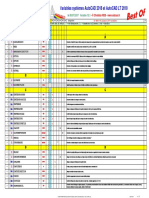
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 paginiVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazeÎncă nu există evaluări
- TD N°2 Maths 3emeDocument5 paginiTD N°2 Maths 3emebilly kanaÎncă nu există evaluări
- Formulaire SUP SuitesDocument2 paginiFormulaire SUP Suiteshala shooowÎncă nu există evaluări
- cm2 Exercices SymetrieDocument4 paginicm2 Exercices Symetriegjx7qcfwmyÎncă nu există evaluări
- Examen National Du BTS - Maintenance Industrielle - Session de Mai 2015Document4 paginiExamen National Du BTS - Maintenance Industrielle - Session de Mai 2015enjy top1Încă nu există evaluări
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Document4 paginiExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatÎncă nu există evaluări
- Alimentations StatiquesDocument16 paginiAlimentations StatiquesKdr Khair-Eddine100% (1)
- SALOMÉ Test Management FrameworkDocument101 paginiSALOMÉ Test Management FrameworkPharell William BaldorÎncă nu există evaluări
- FX808394F FlexES Control FX10 (10 Boucles)Document1 paginăFX808394F FlexES Control FX10 (10 Boucles)Ramdane RamdanoÎncă nu există evaluări
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonDocument42 paginiRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Încă nu există evaluări
- MEMOIRE Samer MoussaDocument94 paginiMEMOIRE Samer Moussatoni JabbourÎncă nu există evaluări
- MathématiquesDocument393 paginiMathématiquesSaido Medjout100% (1)