S-ar putea să vă placă și
- A Study of Techniques To Increase The Sound Insulation of Building ElementsDocument225 paginiA Study of Techniques To Increase The Sound Insulation of Building ElementsAndrew SunderlandÎncă nu există evaluări
- Physical Characteristics of Soils, Plasticity, Settlement Calculations, Interpretation of In-Situ TestsDe la EverandPhysical Characteristics of Soils, Plasticity, Settlement Calculations, Interpretation of In-Situ TestsEvaluare: 3.5 din 5 stele3.5/5 (3)
- ATENA Engineering 3D Users ManualDocument118 paginiATENA Engineering 3D Users ManualNanescu LilianaÎncă nu există evaluări
- Master's Statement at KAUST on Lightweight StructuresDocument3 paginiMaster's Statement at KAUST on Lightweight StructuresAbu Suraisy100% (1)
- Makdisi&Seed (1978)Document70 paginiMakdisi&Seed (1978)samiÎncă nu există evaluări
- Rillej: Portlan'D Cement AssociationDocument328 paginiRillej: Portlan'D Cement AssociationCarlos PEREZ NEYRAÎncă nu există evaluări
- EERC79 Soil Structure InteractionDocument61 paginiEERC79 Soil Structure InteractionjersonlopezfajardoÎncă nu există evaluări
- Te As: of LoadingDocument138 paginiTe As: of Loadingshashank sharmaÎncă nu există evaluări
- PB 80132418Document342 paginiPB 80132418Carlos PEREZ NEYRAÎncă nu există evaluări
- IHR Project Vishaka v. StateDocument16 paginiIHR Project Vishaka v. StateRahul singhÎncă nu există evaluări
- 3Document268 pagini3mohansanjayÎncă nu există evaluări
- Generalized Ring Stiffness Matrix For King-Stiffened Shells of RevolutionDocument54 paginiGeneralized Ring Stiffness Matrix For King-Stiffened Shells of RevolutionColque JhonÎncă nu există evaluări
- ADA246334Document66 paginiADA246334tulzafoundationÎncă nu există evaluări
- Nasa Ntrs Archive 19770018203Document212 paginiNasa Ntrs Archive 19770018203Daniel RouareÎncă nu există evaluări
- PB88235338 PDFDocument156 paginiPB88235338 PDFFrancisco Javier Torres AlvaradoÎncă nu există evaluări
- Environmental Clearance (Barosa Sarkar)Document11 paginiEnvironmental Clearance (Barosa Sarkar)talib ilahiÎncă nu există evaluări
- Combat Orders Process AnalysisDocument238 paginiCombat Orders Process AnalysisMarie Mythos100% (1)
- HI - 962 Centrifugal & PDFDocument46 paginiHI - 962 Centrifugal & PDFFernando RangelÎncă nu există evaluări
- Research Memorandum: National Advisory Committee For AeronauticsDocument39 paginiResearch Memorandum: National Advisory Committee For Aeronauticshariprasadr5199Încă nu există evaluări
- L ( Icr 3 ) Fi) Q R : CSLR - Recruitment Assessment BoardDocument1 paginăL ( Icr 3 ) Fi) Q R : CSLR - Recruitment Assessment Boardagni mitraÎncă nu există evaluări
- Physics of The Planet Venus PDFDocument336 paginiPhysics of The Planet Venus PDFRodel Joy Roncado Dela CruzÎncă nu există evaluări
- Newman Raju Improved Semi Elliptical Crack SurfaceDocument30 paginiNewman Raju Improved Semi Elliptical Crack SurfaceShaun Raphael LeeÎncă nu există evaluări
- .,. - V U, Illd TL' JM ,, .!: UDocument10 pagini.,. - V U, Illd TL' JM ,, .!: UisomeraseÎncă nu există evaluări
- Data Book For Engineers PDFDocument118 paginiData Book For Engineers PDFRajesh BabuÎncă nu există evaluări
- Rec Erc 79 06Document30 paginiRec Erc 79 06MehriÎncă nu există evaluări
- Fund (Classifi Ation, Control: The Employees' RULES, 19 71Document53 paginiFund (Classifi Ation, Control: The Employees' RULES, 19 71GV ELECTRICALSÎncă nu există evaluări
- Passive Solar Energy BookDocument447 paginiPassive Solar Energy BookTuza Kutuza100% (3)
- Lateral Load Test of Drilled Shaft in Clay Reveals Structural FailureDocument110 paginiLateral Load Test of Drilled Shaft in Clay Reveals Structural FailurechrtromÎncă nu există evaluări
- FHWA/TX-84/28+34 - 3: G O"o'''mon'Document94 paginiFHWA/TX-84/28+34 - 3: G O"o'''mon'Lale ÖnerÎncă nu există evaluări
- Rec Erc 76 05Document36 paginiRec Erc 76 05MehriÎncă nu există evaluări
- Operation Market Garden (1944)Document32 paginiOperation Market Garden (1944)CAP History Library100% (3)
- Stargate CIA-RDP96-00787R000100150001-6Document45 paginiStargate CIA-RDP96-00787R000100150001-6taabenaÎncă nu există evaluări
- Solar Flare Compilation PDFDocument220 paginiSolar Flare Compilation PDFSherry PhippsÎncă nu există evaluări
- Reliability - Based Structural Optimization Stochastic Time Varying LoadsDocument158 paginiReliability - Based Structural Optimization Stochastic Time Varying LoadsSivananthasarma LowhikanÎncă nu există evaluări
- PA.GENO. 18 document analysisDocument12 paginiPA.GENO. 18 document analysisDeepthi KakarlaÎncă nu există evaluări
- LBL-17696: Discontinuous Deformation AnalysisDocument20 paginiLBL-17696: Discontinuous Deformation Analysispeng yinÎncă nu există evaluări
- Project 1 NanotechDocument8 paginiProject 1 NanotechTony StarkÎncă nu există evaluări
- 1 Publij: NF T4 J4Ilippin S: / (1Lnu:Gr1?:Zz NF F41?: '4Ilippiu1?:Z QDocument12 pagini1 Publij: NF T4 J4Ilippin S: / (1Lnu:Gr1?:Zz NF F41?: '4Ilippiu1?:Z QAnonymous OzIYtbjZÎncă nu există evaluări
- Nefis ReportDocument10 paginiNefis Reportkabar.siberÎncă nu există evaluări
- Adobe Scan 17 Apr 2023Document5 paginiAdobe Scan 17 Apr 2023Bijoy DuttaÎncă nu există evaluări
- Nasa Technical: Relativistic Electrostatic Slater IntegralsDocument355 paginiNasa Technical: Relativistic Electrostatic Slater IntegralsAYOUB AIEDÎncă nu există evaluări
- Ad 0134053Document88 paginiAd 0134053sirousÎncă nu există evaluări
- PB301326 PDFDocument204 paginiPB301326 PDFPatrickÎncă nu există evaluări
- PE DEA Montesinos Corrupt Officials FileDocument3 paginiPE DEA Montesinos Corrupt Officials FileIDL_ReporterosÎncă nu există evaluări
- Dasara Program23Document10 paginiDasara Program23madhusudhan1999Încă nu există evaluări
- PhysicsDocument25 paginiPhysicsNilaksh Jha 9DÎncă nu există evaluări
- Legal document analysisDocument7 paginiLegal document analysisefrain chisag chisagÎncă nu există evaluări
- ,: ) ?B: :::'.:.' :'/ ,) S .'::ii: R I:i,:,! TJ-L :J : T ( :i ( I !) F: : F (Li J I " : : W :,T? ) I. T:/ !:/ ( I : Bi!st 7'Document55 pagini,: ) ?B: :::'.:.' :'/ ,) S .'::ii: R I:i,:,! TJ-L :J : T ( :i ( I !) F: : F (Li J I " : : W :,T? ) I. T:/ !:/ ( I : Bi!st 7'clekupreÎncă nu există evaluări
- PB277933 PDFDocument156 paginiPB277933 PDFShashikant AmruthlalÎncă nu există evaluări
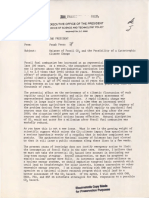
- 1977 Climate MemoDocument3 pagini1977 Climate MemojeffbradynprÎncă nu există evaluări
- Mossadegh and Kashani: From Unity to EnmityDocument153 paginiMossadegh and Kashani: From Unity to EnmityMed1aN1ckÎncă nu există evaluări
- 1959 - The First and Second Positive Bands of N2 - DIEKEDocument198 pagini1959 - The First and Second Positive Bands of N2 - DIEKEAlessandroÎncă nu există evaluări
- Cantilever Retaining Wall Design ProceduresDocument196 paginiCantilever Retaining Wall Design ProceduresvijaykumarzÎncă nu există evaluări
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDocument70 paginiApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontÎncă nu există evaluări
- 64 Cofo-Goodman ApplicationDocument5 pagini64 Cofo-Goodman Applicationapi-406875546Încă nu există evaluări
- P4013coll2 1200Document127 paginiP4013coll2 1200RaduoesÎncă nu există evaluări
- Fame 1Document3 paginiFame 1NevÎncă nu există evaluări
- The Superpave Mix Design Manual For New Construction and OverlaysDocument196 paginiThe Superpave Mix Design Manual For New Construction and Overlaysanant11235Încă nu există evaluări
- C 8215 Rev 2 PDFDocument10 paginiC 8215 Rev 2 PDFHarshavardhan KulkarniÎncă nu există evaluări
- Vol X OppenheimerDocument109 paginiVol X Oppenheimerpeter stoschÎncă nu există evaluări
- The Maddest Idea: An Isaac Biddlecomb NovelDe la EverandThe Maddest Idea: An Isaac Biddlecomb NovelEvaluare: 3.5 din 5 stele3.5/5 (9)
- Sagar Smart City Limited: RFP No: SSCL/TENDER/ - /2019-20Document129 paginiSagar Smart City Limited: RFP No: SSCL/TENDER/ - /2019-20Smith SivaÎncă nu există evaluări
- Gabion Gravity Wall DesignDocument14 paginiGabion Gravity Wall DesignmatsoulÎncă nu există evaluări
- Test 09 PDFDocument7 paginiTest 09 PDFSaptarshi NandiÎncă nu există evaluări
- Sagar Smart City Limited: RFP No: SSCL/TENDER/ - /2019-20Document129 paginiSagar Smart City Limited: RFP No: SSCL/TENDER/ - /2019-20Smith SivaÎncă nu există evaluări
- Lecture11 PDFDocument16 paginiLecture11 PDFAswathy M NÎncă nu există evaluări
- Sumandeep Vidyapeeth Fees StructureDocument2 paginiSumandeep Vidyapeeth Fees Structurejinesh shahÎncă nu există evaluări
- Sumandeep Vidyapeeth Fees StructureDocument2 paginiSumandeep Vidyapeeth Fees Structurejinesh shahÎncă nu există evaluări
- C10487-04 Revb PDFDocument1 paginăC10487-04 Revb PDFjinesh shahÎncă nu există evaluări
- Sumandeep Vidyapeeth Fees StructureDocument2 paginiSumandeep Vidyapeeth Fees Structurejinesh shahÎncă nu există evaluări
- Ziduri Pam ArmatDocument81 paginiZiduri Pam ArmattodoransÎncă nu există evaluări
- 58 Soil Testing Report of 400KV SankhariDocument12 pagini58 Soil Testing Report of 400KV SankhariNorendro KangjamÎncă nu există evaluări
- Florida Method of Test For Minimum Resistivity of Soil and WaterDocument6 paginiFlorida Method of Test For Minimum Resistivity of Soil and Waterjinesh shahÎncă nu există evaluări
- 58 Soil Testing Report of 400KV SankhariDocument12 pagini58 Soil Testing Report of 400KV SankhariNorendro KangjamÎncă nu există evaluări
- C10487-04 Revb PDFDocument1 paginăC10487-04 Revb PDFjinesh shahÎncă nu există evaluări
- Astm d4380-84 (2001) 膨润土泥浆的密度的标准试验方法 - 百度文库Document3 paginiAstm d4380-84 (2001) 膨润土泥浆的密度的标准试验方法 - 百度文库jinesh shahÎncă nu există evaluări
- Analysis of Soil Borings For Liquefaction ResistanceDocument20 paginiAnalysis of Soil Borings For Liquefaction ResistanceGerald TanÎncă nu există evaluări
- Socketing Depth of Piles in RockDocument4 paginiSocketing Depth of Piles in RockNAUTILUS87100% (1)
- Pile Foundations v1.00 Oct2010Document17 paginiPile Foundations v1.00 Oct2010Munteanu DanÎncă nu există evaluări
- Dynamic Stiffness of Foundations Compared in 2D and 3D ModelsDocument48 paginiDynamic Stiffness of Foundations Compared in 2D and 3D Modelsjinesh shahÎncă nu există evaluări
- Unit Special Types of Foundations: StructureDocument50 paginiUnit Special Types of Foundations: Structurejinesh shahÎncă nu există evaluări
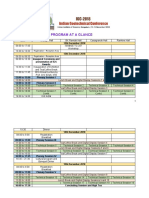
- IGS Conference Program and Technical Sessions ScheduleDocument25 paginiIGS Conference Program and Technical Sessions Schedulejinesh shah100% (1)
- Socketing Depth of Piles in RockDocument4 paginiSocketing Depth of Piles in RockNAUTILUS87100% (1)
- Labview DocumentDocument1 paginăLabview Documentjinesh shahÎncă nu există evaluări
- Analysis and Design of Circular Prestressed Concrete Storage TanksDocument22 paginiAnalysis and Design of Circular Prestressed Concrete Storage Tankschondroc11Încă nu există evaluări
- Nonlinear FEA of ElastomersDocument64 paginiNonlinear FEA of ElastomersYudhi AriadiÎncă nu există evaluări
- SPE-181275-MS Successful Development and Implementation of 9 5/8 Subsurface Safety Valve For High Pressure, High Rate Gas WellsDocument11 paginiSPE-181275-MS Successful Development and Implementation of 9 5/8 Subsurface Safety Valve For High Pressure, High Rate Gas WellsLuis David Concha CastilloÎncă nu există evaluări
- SEEPAGEDocument15 paginiSEEPAGECharles OtienoÎncă nu există evaluări
- Rolling Technology and Theory For The Last 100 Years Matsuo ATAKADocument14 paginiRolling Technology and Theory For The Last 100 Years Matsuo ATAKASamir Bose100% (1)
- NTU Education (BRC Course Content) PDFDocument15 paginiNTU Education (BRC Course Content) PDFpearlynÎncă nu există evaluări
- SAP2000 Academic TrainingDocument48 paginiSAP2000 Academic Trainingkg93% (15)
- Syllabus (402050B) Finite Element Analysis (Elective IV)Document3 paginiSyllabus (402050B) Finite Element Analysis (Elective IV)shekhusatavÎncă nu există evaluări
- Design Analysis of Light StructuresDocument17 paginiDesign Analysis of Light StructuresgligamsnÎncă nu există evaluări
- Ansys Manual Final Year Anna UniversityDocument32 paginiAnsys Manual Final Year Anna UniversityYukesh Kumar SinghÎncă nu există evaluări
- Introduction To Finite Element Methods Constant Strain Triangle Intro To FEM CST PDFDocument34 paginiIntroduction To Finite Element Methods Constant Strain Triangle Intro To FEM CST PDFthouseef06Încă nu există evaluări
- Printing - Options For Running OptiStructDocument6 paginiPrinting - Options For Running OptiStructliviu_scurtu4656Încă nu există evaluări
- Driving Innovation in Manufacturing: Morfeo v1.1 FeaturesDocument2 paginiDriving Innovation in Manufacturing: Morfeo v1.1 FeaturesHenrique Rodrigues OliveiraÎncă nu există evaluări
- CiTECH Energy Recovery Solutions UK Limited Q19 Promo PDFDocument44 paginiCiTECH Energy Recovery Solutions UK Limited Q19 Promo PDFBaljeet GundevÎncă nu există evaluări
- 777 Empennage Certification ApproachDocument18 pagini777 Empennage Certification Approachgarystevensoz100% (2)
- HS Chem Solving ProblemsDocument480 paginiHS Chem Solving ProblemsHomer Silva100% (1)
- FSI Simulation of Hydraulic Axial Pump DesignDocument31 paginiFSI Simulation of Hydraulic Axial Pump DesignvahidssÎncă nu există evaluări
- Özet Kitapçığı Syf 368-369Document676 paginiÖzet Kitapçığı Syf 368-369halil zeybekÎncă nu există evaluări
- Lecture 3 Numerical MethodsDocument61 paginiLecture 3 Numerical MethodsLeandro Di BartoloÎncă nu există evaluări
- T000882 PDFDocument105 paginiT000882 PDFZarr AkshÎncă nu există evaluări
- Sofistik 1Document121 paginiSofistik 1AshutoshAparajÎncă nu există evaluări
- Chung2006 PDFDocument9 paginiChung2006 PDFNguyen Tran HieuÎncă nu există evaluări
- Elbow Stiffness PDFDocument5 paginiElbow Stiffness PDFAnand ShahÎncă nu există evaluări
- J. E. Lagnese, Günter Leugering, E. J. P. G. Schmidt Auth. Modeling, Analysis and Control of Dynamic Elastic Multi-Link StructuresDocument397 paginiJ. E. Lagnese, Günter Leugering, E. J. P. G. Schmidt Auth. Modeling, Analysis and Control of Dynamic Elastic Multi-Link Structuresfernando hervert perezÎncă nu există evaluări
- 14 Computer Aided Design Electrical ApparatusDocument87 pagini14 Computer Aided Design Electrical ApparatusKARTHIKEYANÎncă nu există evaluări
- Finite Element Analysis of Structures Mid-term and Final ExamsDocument25 paginiFinite Element Analysis of Structures Mid-term and Final ExamshoneybÎncă nu există evaluări
- Calculating Drawbead ForceDocument12 paginiCalculating Drawbead ForceChris RafaelÎncă nu există evaluări
- CFD Less 1-+introductionDocument16 paginiCFD Less 1-+introductionKerita ShinÎncă nu există evaluări