S-ar putea să vă placă și
- Complete Science For Cambridge Lower Secondary PDFDocument2 paginiComplete Science For Cambridge Lower Secondary PDFSultan_Alattaf60% (10)
- TOEFL Speaking and Writing TemplatesDocument10 paginiTOEFL Speaking and Writing TemplatesNikita Thakur100% (4)
- 2 Digit Token Display System ReportDocument9 pagini2 Digit Token Display System Reportdeardestiny100% (1)
- Guia Del Estudiante RJ3iB ESPDocument170 paginiGuia Del Estudiante RJ3iB ESPMAICK_ITSÎncă nu există evaluări
- 72815Document79 pagini72815Ayyar KandasamyÎncă nu există evaluări
- Multivariable Control SystemDocument39 paginiMultivariable Control SystemAmeerRashidÎncă nu există evaluări
- Multivariable Control SystemDocument39 paginiMultivariable Control SystemFatin FatehaÎncă nu există evaluări
- Feedback Control PID Control: HadiyantoDocument64 paginiFeedback Control PID Control: HadiyantoNuzul RamadhaniÎncă nu există evaluări
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 paginiCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86Încă nu există evaluări
- ProcessDocument38 paginiProcessVaidh Prakash ChoudharyÎncă nu există evaluări
- Multiloop and Multivariable Control PDFDocument43 paginiMultiloop and Multivariable Control PDFVaibhav AhujaÎncă nu există evaluări
- Control of Multiple-Input, Multiple-Output ProcessesDocument27 paginiControl of Multiple-Input, Multiple-Output Processesmeseret sisayÎncă nu există evaluări
- Decoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Document32 paginiDecoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Waqas KianiÎncă nu există evaluări
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 paginiControl of Multiple-Input, Multiple-Output ProcessespraveenmandeÎncă nu există evaluări
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 paginiCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreÎncă nu există evaluări
- Zero With A Positive Real Part Inverse Response Character: S S K S K K S K S K S K X YDocument27 paginiZero With A Positive Real Part Inverse Response Character: S S K S K K S K S K S K X YCupa no DensetsuÎncă nu există evaluări
- Chapter 18Document31 paginiChapter 18Mahmoud ElsisiÎncă nu există evaluări
- Week 4 Assignment 1 SolutionDocument10 paginiWeek 4 Assignment 1 Solutionkirankuma.jagtapÎncă nu există evaluări
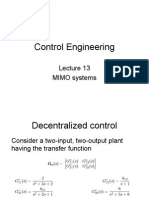
- Control Engineering: MIMO SystemsDocument26 paginiControl Engineering: MIMO SystemsPisicuta LaviniaÎncă nu există evaluări
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 paginiControl of Multiple-Input, Multiple-Output ProcessesdhineshpÎncă nu există evaluări
- Control of Multiple-Input, Multiple-Output (MIMO) ProcessesDocument38 paginiControl of Multiple-Input, Multiple-Output (MIMO) Processessalvador2meÎncă nu există evaluări
- FY Eng PDFDocument36 paginiFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaÎncă nu există evaluări
- UntitledDocument14 paginiUntitledCupa no DensetsuÎncă nu există evaluări
- Automation Exam Formula SheetDocument10 paginiAutomation Exam Formula SheetRobert LoweÎncă nu există evaluări
- Worksheet 10Document3 paginiWorksheet 10rahmat qambariÎncă nu există evaluări
- Chapter 11Document46 paginiChapter 11ninoska217608Încă nu există evaluări
- Closed Loop Control SystemDocument18 paginiClosed Loop Control Systemkalyan mondalÎncă nu există evaluări
- Chapter 10 - Stability of Closed-Loop Control SystemsDocument27 paginiChapter 10 - Stability of Closed-Loop Control SystemsFakhrulShahrilEzanieÎncă nu există evaluări
- Signal and System NormsDocument15 paginiSignal and System NormsAbrar HussainÎncă nu există evaluări
- Chapter 11 Chang.1Document34 paginiChapter 11 Chang.1satya sagarÎncă nu există evaluări
- Control ActionDocument11 paginiControl ActionfaizÎncă nu există evaluări
- Control Chapter07 - GearTeamDocument71 paginiControl Chapter07 - GearTeamNabilaSalsaÎncă nu există evaluări
- Closed-Loop DynamicsDocument20 paginiClosed-Loop Dynamicsjunhao_tan_1100% (1)
- Gouy PhaseDocument11 paginiGouy Phase王煜閔Încă nu există evaluări
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 paginiChap10 - 2 - Stability of Closed-Loop Control SystemsSaidÎncă nu există evaluări
- Y y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamDocument3 paginiY y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamManoj TribhuwanÎncă nu există evaluări
- EE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-StateDocument30 paginiEE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-Statepremsanjith subramaniÎncă nu există evaluări
- Lect 8 Dynamic Behaviour of Feedback Controller ProcessDocument12 paginiLect 8 Dynamic Behaviour of Feedback Controller ProcessZaidoon MohsinÎncă nu există evaluări
- Chapter 6slideDocument72 paginiChapter 6slidehailegebreselassie24Încă nu există evaluări
- Multivariable Control For MIMO ProcessesDocument14 paginiMultivariable Control For MIMO ProcessesJuanÎncă nu există evaluări
- Gain and Phase MarginsDocument5 paginiGain and Phase MarginsamitkallerÎncă nu există evaluări
- Lecture38 PDFDocument5 paginiLecture38 PDFNiyas PÎncă nu există evaluări
- Controller Design Using Root Locus: 14.1 PD ControlDocument11 paginiController Design Using Root Locus: 14.1 PD Controlasalifew belachewÎncă nu există evaluări
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 paginiAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiÎncă nu există evaluări
- Adaptive PID With Sliding Mode Control For The Rotary InvertedDocument6 paginiAdaptive PID With Sliding Mode Control For The Rotary InvertedImee RistikaÎncă nu există evaluări
- t7 PDFDocument13 paginit7 PDFKj_bdÎncă nu există evaluări
- Controller Design For Processes With Difficult DynamicsDocument24 paginiController Design For Processes With Difficult DynamicsMuhammed AfnazÎncă nu există evaluări
- Pid Controller Design and TuningDocument33 paginiPid Controller Design and TuningfaqihÎncă nu există evaluări
- MVC - PDF MimoDocument40 paginiMVC - PDF Mimoyumna munirÎncă nu există evaluări
- Automatic Control Systems TheoryDocument9 paginiAutomatic Control Systems TheoryJames KabugoÎncă nu există evaluări
- Enhanced Single-Loop Control StrategiesDocument29 paginiEnhanced Single-Loop Control StrategiesAsk EthiopiaÎncă nu există evaluări
- Cascaded PIDDocument14 paginiCascaded PIDTatenda BizureÎncă nu există evaluări
- Controller Tuning: CHME 624 Advance Process Dynamic Modelling & ControlDocument15 paginiController Tuning: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriÎncă nu există evaluări
- Colorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M PDocument6 paginiColorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M Parpit gargÎncă nu există evaluări
- Experiment No 1 Flow Through A Sluice Gate PDFDocument11 paginiExperiment No 1 Flow Through A Sluice Gate PDFMohamed Nageeb SalemÎncă nu există evaluări
- Process Control: Version 2 EE IIT, Kharagpur 1Document13 paginiProcess Control: Version 2 EE IIT, Kharagpur 1Malyaj SrivastavaÎncă nu există evaluări
- Chapter 14Document25 paginiChapter 14●●●●●●●1Încă nu există evaluări
- Dynamic Analysis of Manipulators: Newtonian Approach: Berke GürDocument30 paginiDynamic Analysis of Manipulators: Newtonian Approach: Berke GürOmar Seraj Ed-DeenÎncă nu există evaluări
- Stability of Closed-Loop Control SystemsDocument19 paginiStability of Closed-Loop Control SystemsThrishnaa BalasupurManiamÎncă nu există evaluări
- Advanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsDocument5 paginiAdvanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsSidhant SharanÎncă nu există evaluări
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDocument66 paginiController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarÎncă nu există evaluări
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiDe la EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- 5.ee6201 May 2016Document9 pagini5.ee6201 May 2016Anonymous yO7rcec6vuÎncă nu există evaluări
- 6.TR Nov'2017Document2 pagini6.TR Nov'2017Anonymous yO7rcec6vuÎncă nu există evaluări
- Anna University Examination Questions: EE6201-Circuit Theory NOV - 2015Document9 paginiAnna University Examination Questions: EE6201-Circuit Theory NOV - 2015Anonymous yO7rcec6vuÎncă nu există evaluări
- Anna University Examination Questions: EE6201-Circuit Theory NOV - 2014Document8 paginiAnna University Examination Questions: EE6201-Circuit Theory NOV - 2014Anonymous yO7rcec6vuÎncă nu există evaluări
- Anna University Examination Questions: EE6201-Circuit Theory May - 2015Document7 paginiAnna University Examination Questions: EE6201-Circuit Theory May - 2015Anonymous yO7rcec6vuÎncă nu există evaluări
- EI 8352 TR - Nov 17Document2 paginiEI 8352 TR - Nov 17Anonymous yO7rcec6vuÎncă nu există evaluări
- 4.EI6401TR Nov2016 - KeyDocument13 pagini4.EI6401TR Nov2016 - KeyAnonymous yO7rcec6vuÎncă nu există evaluări
- Anna University Examination Questions: EE6201-Circuit Theory May - 2014Document8 paginiAnna University Examination Questions: EE6201-Circuit Theory May - 2014Anonymous yO7rcec6vuÎncă nu există evaluări
- Ce Nov 19 R17Document18 paginiCe Nov 19 R17Anonymous yO7rcec6vuÎncă nu există evaluări
- Ec8351 Electron Devices and CircuitsDocument1 paginăEc8351 Electron Devices and CircuitsAnonymous yO7rcec6vuÎncă nu există evaluări
- DTSSP 2mark Q&ADocument31 paginiDTSSP 2mark Q&AAnonymous yO7rcec6vuÎncă nu există evaluări
- K L N College of Engineering Pottapalaym: 1 Gshs S 100Document2 paginiK L N College of Engineering Pottapalaym: 1 Gshs S 100Anonymous yO7rcec6vuÎncă nu există evaluări
- EI 6602 - Process ControlDocument2 paginiEI 6602 - Process ControlAnonymous yO7rcec6vuÎncă nu există evaluări
- Name: Digital Logic Circuits (Common To ICE) Part A (20X2 40 Marks) Answer All QuestionsDocument2 paginiName: Digital Logic Circuits (Common To ICE) Part A (20X2 40 Marks) Answer All QuestionsAnonymous yO7rcec6vuÎncă nu există evaluări
- CS ASS2 (13-17batch)Document3 paginiCS ASS2 (13-17batch)Anonymous yO7rcec6vuÎncă nu există evaluări
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Document6 paginiIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuÎncă nu există evaluări
- IC6701 May 18 With KeyDocument14 paginiIC6701 May 18 With KeyAnonymous yO7rcec6vuÎncă nu există evaluări
- CS ASS2 (13-17batch)Document3 paginiCS ASS2 (13-17batch)Anonymous yO7rcec6vuÎncă nu există evaluări
- Book Exams With Invensis LearningDocument7 paginiBook Exams With Invensis LearningValan In-My VeinsÎncă nu există evaluări
- Hospital Management ProjectDocument6 paginiHospital Management ProjectawaisÎncă nu există evaluări
- Auto-Gate ReportDocument21 paginiAuto-Gate Reportstamford_bridgeÎncă nu există evaluări
- Grade 5 Parallels and Meridians BLDDocument6 paginiGrade 5 Parallels and Meridians BLDAnu ReddyÎncă nu există evaluări
- Seminar FormatDocument6 paginiSeminar Formatupasana joliaÎncă nu există evaluări
- Kellogg's Case StudyDocument3 paginiKellogg's Case StudyÁkos Marian50% (2)
- REHABILITATION of Marine StructuresDocument98 paginiREHABILITATION of Marine StructuresBalan-Nogi Dan100% (1)
- Health Center LetterDocument2 paginiHealth Center LetterIyah DimalantaÎncă nu există evaluări
- Đề Nghe 19.sepDocument5 paginiĐề Nghe 19.sepThanh Binh Pham ThiÎncă nu există evaluări
- Using The Developer Console To Execute Apex CodeDocument5 paginiUsing The Developer Console To Execute Apex Codeksr131Încă nu există evaluări
- Operating Systems PDFDocument11 paginiOperating Systems PDFsidsurÎncă nu există evaluări
- 01 IntroductionDocument26 pagini01 IntroductionDaniel CrashOverride ShaferÎncă nu există evaluări
- DW Basic + UnixDocument31 paginiDW Basic + UnixbabjeereddyÎncă nu există evaluări
- World Hub Indonesia-TurkeyDocument2 paginiWorld Hub Indonesia-TurkeyJihan ZahraÎncă nu există evaluări
- GradDocument74 paginiGradMoHamedÎncă nu există evaluări
- Literature SurveyDocument6 paginiLiterature SurveyAnonymous j0aO95fgÎncă nu există evaluări
- List of Contributors: - Ukurova University, Adana, TurkeyDocument416 paginiList of Contributors: - Ukurova University, Adana, TurkeyBelhadj TarekÎncă nu există evaluări
- PFI ES-27-1994 - Visual Examination - The Purpose, Meaning and Limitation of The TermDocument4 paginiPFI ES-27-1994 - Visual Examination - The Purpose, Meaning and Limitation of The TermThao NguyenÎncă nu există evaluări
- Decision TreeDocument3 paginiDecision Tree64-Shashank SagarÎncă nu există evaluări
- Killiliisa StrategyDocument49 paginiKilliliisa StrategyNunatsiaqNewsÎncă nu există evaluări
- Mass Pharma Form-7 Items PDFDocument11 paginiMass Pharma Form-7 Items PDFAsif HanifÎncă nu există evaluări
- Curriculum Vitae: Basanta BhowmikDocument5 paginiCurriculum Vitae: Basanta BhowmikBasanta BhowmikÎncă nu există evaluări
- KitkatDocument11 paginiKitkatSugandha GuptaÎncă nu există evaluări
- Opening Image in MFC Dialog With OpenCVDocument9 paginiOpening Image in MFC Dialog With OpenCVJuan José CárdenasÎncă nu există evaluări
- Bei 076 III II AntenamarksDocument8 paginiBei 076 III II Antenamarksshankar bhandariÎncă nu există evaluări