S-ar putea să vă placă și
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDocument6 paginiTD 16 Corrigé - Liaisons - Schéma CinématiqueSamba Sall0% (1)
- قواعد دراسة الدالة بالفرنسيةDocument2 paginiقواعد دراسة الدالة بالفرنسيةSoufian Jaafar100% (3)
- Les Branches InfiniesDocument2 paginiLes Branches InfiniesBessem Bhiri92% (37)
- Turbulence TD-1Document2 paginiTurbulence TD-1yosri50% (2)
- Partiel RATRAPPAGE 2022-2023 Gestion de Production MR MARQUISDocument4 paginiPartiel RATRAPPAGE 2022-2023 Gestion de Production MR MARQUISFatima Zahra ErrouissiÎncă nu există evaluări
- Prayer in C Lilly Wood David Schulz Galago MusicDocument2 paginiPrayer in C Lilly Wood David Schulz Galago MusicCharles GiudicelliÎncă nu există evaluări
- Analyse Sur Maintenance PrépréventiveDocument5 paginiAnalyse Sur Maintenance PrépréventiveForloul CharefÎncă nu există evaluări
- Schéma Fonction Application Injection SurjectionDocument10 paginiSchéma Fonction Application Injection SurjectionVINCENT PERRINÎncă nu există evaluări
- Mon Carnet Des Tables De-Multiplication BDG 2017Document4 paginiMon Carnet Des Tables De-Multiplication BDG 2017larziÎncă nu există evaluări
- Hero Too TabsDocument3 paginiHero Too TabsSaga de GéminisÎncă nu există evaluări
- Cho Ford 1 15Document157 paginiCho Ford 1 15intetsu kuroganeÎncă nu există evaluări
- Ce1 Exercices SegmentDocument4 paginiCe1 Exercices SegmentAsmaa AbbadiÎncă nu există evaluări
- TD2 Composition de MouvementDocument3 paginiTD2 Composition de MouvementimadÎncă nu există evaluări
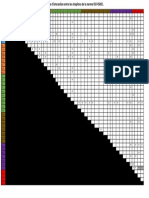
- Matrice D'interaction Entre Les Chapitres de La Norme ISO 45001Document1 paginăMatrice D'interaction Entre Les Chapitres de La Norme ISO 45001lotfi harrathiÎncă nu există evaluări
- Continuité - 1 - FRDocument2 paginiContinuité - 1 - FRLavoca MohamedÎncă nu există evaluări
- 1bex 08 Limites Sr2Fr AmmariDocument1 pagină1bex 08 Limites Sr2Fr AmmariBIKOLA FFÎncă nu există evaluări
- Cours 14Document4 paginiCours 14BalalaŇaŖîfÎncă nu există evaluări
- (WWW - Al7ibre - Com) Limites Et Continuité Serie 4Document5 pagini(WWW - Al7ibre - Com) Limites Et Continuité Serie 4Abd Elmooti HijaziÎncă nu există evaluări
- ใกล้Document4 paginiใกล้vipada.tnpÎncă nu există evaluări
- PDF 11mar24 0130 SplittedDocument2 paginiPDF 11mar24 0130 SplittedM6Încă nu există evaluări
- Ana 25Document21 paginiAna 25Smail RCAÎncă nu există evaluări
- 2bex 01 Continuité Sr4Fr AmmariDocument1 pagină2bex 01 Continuité Sr4Fr Ammarilinaflower41Încă nu există evaluări
- 2bex 01 Continuité Sr3Fr AmmariDocument1 pagină2bex 01 Continuité Sr3Fr Ammarilinaflower41Încă nu există evaluări
- Annales Maths TD (Profs) 2010-2011 PDFDocument131 paginiAnnales Maths TD (Profs) 2010-2011 PDFDJEMELEOU FULBERT BILEÎncă nu există evaluări
- Exercices Avec Solutions Limite Et ContinuitéDocument14 paginiExercices Avec Solutions Limite Et ContinuitéMarouaneRimo100% (1)
- Les Intégrales: 1.1 La PrimitiveDocument653 paginiLes Intégrales: 1.1 La PrimitiveRayan AllacheÎncă nu există evaluări
- 2bex 01 Continuité Sr2Fr AmmariDocument1 pagină2bex 01 Continuité Sr2Fr Ammarilinaflower41Încă nu există evaluări
- Intermediate Level 1Document2 paginiIntermediate Level 1obedientcrimeÎncă nu există evaluări
- TD1 - Correction (1) Compta de GestionDocument8 paginiTD1 - Correction (1) Compta de GestionkabacheassimÎncă nu există evaluări
- HUAWEI E8372 Quick Start (E8372h 153,01, en GB)Document72 paginiHUAWEI E8372 Quick Start (E8372h 153,01, en GB)Yiorgos TheoÎncă nu există evaluări
- AutobusDocument1 paginăAutobusAbdelali Yacoubi100% (1)
- Limites Et Continuite Corrige Serie D Exercices 2 3Document14 paginiLimites Et Continuite Corrige Serie D Exercices 2 3Jaowad AbabouÎncă nu există evaluări
- 6126b1122be5ffiche Methode Mathematiques Serie g2Document2 pagini6126b1122be5ffiche Methode Mathematiques Serie g2Etienne TanohÎncă nu există evaluări
- Datos Del CuestionarioDocument31 paginiDatos Del CuestionarioLolha Loplus LsÎncă nu există evaluări
- Theorie de MecanismeDocument30 paginiTheorie de MecanismeDhia AdouniÎncă nu există evaluări
- Proba 2Document4 paginiProba 2amaniÎncă nu există evaluări
- 3 Cours de Prob Mars 2020 1Document9 pagini3 Cours de Prob Mars 2020 1abdelwahabÎncă nu există evaluări
- 870304983Document5 pagini870304983Yves BulediÎncă nu există evaluări
- Limites Et Continuité - 4ème SC ExpDocument5 paginiLimites Et Continuité - 4ème SC Expytube.channel49Încă nu există evaluări
- Brabants Realbook - 024 - C BassDocument2 paginiBrabants Realbook - 024 - C BassDanny DeenenÎncă nu există evaluări
- TD Dérivation 1 Er s1 2006-2007 - Old1Document3 paginiTD Dérivation 1 Er s1 2006-2007 - Old1dieyecheikh2014Încă nu există evaluări
- Limites Resume de Cours 2Document2 paginiLimites Resume de Cours 2Faezz AbÎncă nu există evaluări
- Fonction Mémoire 2Document2 paginiFonction Mémoire 2basmaÎncă nu există evaluări
- Chap 4 ACPDocument4 paginiChap 4 ACPGhofrane JwÎncă nu există evaluări
- TS Cours Sur Les Limites - 2Document8 paginiTS Cours Sur Les Limites - 2rado andriamonjeÎncă nu există evaluări
- 1 Re S Cours Sur Approche Intuitive Des LimitesDocument5 pagini1 Re S Cours Sur Approche Intuitive Des LimitesBassirou DiopÎncă nu există evaluări
- 1 Cours Limites Lecon2Document3 pagini1 Cours Limites Lecon2Mohamed el-moktarÎncă nu există evaluări
- Cours 12Document5 paginiCours 12BalalaŇaŖîfÎncă nu există evaluări
- 1cours 2pc SVT LimitesDocument1 pagină1cours 2pc SVT LimitesELFATEHY COURSÎncă nu există evaluări
- Guide Juridique Tout Savoir Sur Les Enfants en Conflit Avec La LoiDocument12 paginiGuide Juridique Tout Savoir Sur Les Enfants en Conflit Avec La LoiLazare KPLOYAÎncă nu există evaluări
- Math-Ivoire - TD - 2018-2019-1Document111 paginiMath-Ivoire - TD - 2018-2019-1tajsharryÎncă nu există evaluări
- Serie N°3 Exercices Non Corrige Limites Et ContinuiteDocument2 paginiSerie N°3 Exercices Non Corrige Limites Et ContinuiteAdreral YTÎncă nu există evaluări
- Capture D'écran, Le 2023-10-25 À 19.49.46Document11 paginiCapture D'écran, Le 2023-10-25 À 19.49.46Brenki NurkaÎncă nu există evaluări
- Qui Est-Ce Harry PotterDocument9 paginiQui Est-Ce Harry PotterNicolas ChanayÎncă nu există evaluări
- Extentions A La Preparation MedecineDocument6 paginiExtentions A La Preparation MedecineOmar OmariÎncă nu există evaluări
- CamScanner 12-26-2022 12.04Document2 paginiCamScanner 12-26-2022 12.04ayoubÎncă nu există evaluări
- Les Branches InfiniesDocument3 paginiLes Branches InfiniesOussama TkhÎncă nu există evaluări
- Cours 03 Limites ContinuiteDocument12 paginiCours 03 Limites ContinuitealiÎncă nu există evaluări
- Équations différentielles: Les Grands Articles d'UniversalisDe la EverandÉquations différentielles: Les Grands Articles d'UniversalisÎncă nu există evaluări
- Histoire Des 3 ÂnesDocument2 paginiHistoire Des 3 Âneslephilo57Încă nu există evaluări
- A LireDocument1 paginăA Lirelephilo57Încă nu există evaluări
- 5 Aliments Pour Un Cerveau en Forme - ModifDocument5 pagini5 Aliments Pour Un Cerveau en Forme - Modiflephilo57Încă nu există evaluări
- 20 Animaux Gigantesques Et Vraiment Impressionnants - ModifDocument3 pagini20 Animaux Gigantesques Et Vraiment Impressionnants - Modiflephilo57Încă nu există evaluări
- 10 Perles Prononcées Par Des Patients À Leur MédecinDocument3 pagini10 Perles Prononcées Par Des Patients À Leur Médecinlephilo57Încă nu există evaluări
- A Propos Du Jeûne en CancérologieDocument4 paginiA Propos Du Jeûne en Cancérologielephilo57Încă nu există evaluări
- PARTIEL 1&2-sect-C-LMD DECOUVERTEDocument3 paginiPARTIEL 1&2-sect-C-LMD DECOUVERTElephilo57Încă nu există evaluări
- Pourquoi Lamour Fait MalDocument31 paginiPourquoi Lamour Fait Mallephilo57Încă nu există evaluări
- Théorie Des Mécanismes Et Des MachinesDocument10 paginiThéorie Des Mécanismes Et Des Machineslephilo57Încă nu există evaluări
- Chapitre 5Document7 paginiChapitre 5lephilo57Încă nu există evaluări
- 2008 Contrôle ContinuDocument1 pagină2008 Contrôle Continulephilo57Încă nu există evaluări
- Mouvements Diaporame PpsDocument43 paginiMouvements Diaporame Ppslephilo57Încă nu există evaluări
- Test Fab MecaDocument2 paginiTest Fab Mecalephilo57Încă nu există evaluări
- TMM Intro Chap1Document10 paginiTMM Intro Chap1lephilo57100% (1)
- Devenir Psychanalyste, Comment Et Pourquoi Choisir Cette VoieDocument6 paginiDevenir Psychanalyste, Comment Et Pourquoi Choisir Cette Voielephilo57Încă nu există evaluări
- Schéma CinématiqueDocument1 paginăSchéma Cinématiquelephilo57Încă nu există evaluări
- 2 TopiqueDocument3 pagini2 Topiquelephilo57Încă nu există evaluări
- 6.le Complexe D'oedipeDocument4 pagini6.le Complexe D'oedipelephilo57Încă nu există evaluări
- Voc Tech2Document36 paginiVoc Tech2lephilo57Încă nu există evaluări
- Le Saviez VousDocument19 paginiLe Saviez Vouslephilo57Încă nu există evaluări
- Pour Introduire Le Narcissisme, S. Freud (1914c) - Cairn - InfoDocument4 paginiPour Introduire Le Narcissisme, S. Freud (1914c) - Cairn - Infolephilo570% (1)
- Vocabulaire Des Sciences de L'ingénieurDocument32 paginiVocabulaire Des Sciences de L'ingénieurAlaealeaÎncă nu există evaluări
- Comment Devient-On Psychanalyste - ŒdipeDocument4 paginiComment Devient-On Psychanalyste - Œdipelephilo57Încă nu există evaluări
- Voc Tech2Document36 paginiVoc Tech2lephilo57Încă nu există evaluări
- 2016 1 Fichier Vocabulaire TechniqueDocument26 pagini2016 1 Fichier Vocabulaire TechniqueYassineZklÎncă nu există evaluări
- 5-2 - Dimensionnement Clavette PDFDocument9 pagini5-2 - Dimensionnement Clavette PDFZineb El KostaliÎncă nu există evaluări
- 2016 1 Fichier Vocabulaire TechniqueDocument26 pagini2016 1 Fichier Vocabulaire TechniqueYassineZklÎncă nu există evaluări
- 1301857Document29 pagini1301857Hamza ElallamÎncă nu există evaluări
- Conception Des Éléments MachinesDocument7 paginiConception Des Éléments Machineslephilo57Încă nu există evaluări
- Papierperf RV v2Document24 paginiPapierperf RV v2lephilo57Încă nu există evaluări
- Exercices - Moments Et Couple de Forces - Elève - BACDocument3 paginiExercices - Moments Et Couple de Forces - Elève - BACNzuziÎncă nu există evaluări
- Mise en Forme Des Polymeres Extrait ch5Document20 paginiMise en Forme Des Polymeres Extrait ch5EmmanuelÎncă nu există evaluări
- Mon Cours Mecanique Sols UMBB PDFDocument65 paginiMon Cours Mecanique Sols UMBB PDFidrissi_toronÎncă nu există evaluări
- IEC 60534-6 Industrial Process Control Valves - Mounting Details For Attachment of PositionersDocument19 paginiIEC 60534-6 Industrial Process Control Valves - Mounting Details For Attachment of PositionersNguyễn Nhật ÁnhÎncă nu există evaluări
- CH 6-2 Etude SismiqueDocument9 paginiCH 6-2 Etude SismiqueBeny Abdou100% (10)
- GCI-200 Solutionnaire E08Document22 paginiGCI-200 Solutionnaire E08GBA65Încă nu există evaluări
- Corrigé TD 4 Méca Sol 1Document5 paginiCorrigé TD 4 Méca Sol 1mohamed amineÎncă nu există evaluări
- Corrige Type RDM s4Document3 paginiCorrige Type RDM s4bessa7144Încă nu există evaluări
- ILEPHYSIQUE Phys 1s Travail PuissanceDocument3 paginiILEPHYSIQUE Phys 1s Travail PuissanceMoussa BanaÎncă nu există evaluări
- Chapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxDocument5 paginiChapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxFrancis SonkengÎncă nu există evaluări
- DL Béton Précontraint HJDocument10 paginiDL Béton Précontraint HJHAMZA KANANEÎncă nu există evaluări
- Dimension OvoideDocument8 paginiDimension OvoidedinoxÎncă nu există evaluări
- Travail Energie Potentielle de Pesanteur Et Energie Mécanique Prof - Sbiro (WWW - Pc1.ma)Document3 paginiTravail Energie Potentielle de Pesanteur Et Energie Mécanique Prof - Sbiro (WWW - Pc1.ma)God WarÎncă nu există evaluări
- NDC - PassarelleDocument10 paginiNDC - PassarellevladÎncă nu există evaluări
- Ouvrage de Mr. DahmaniDocument15 paginiOuvrage de Mr. DahmanibrahimÎncă nu există evaluări
- PhysiqueDocument14 paginiPhysiqueSerge DemirdjianÎncă nu există evaluări
- ENGRENAGESDocument54 paginiENGRENAGESjaafar alÎncă nu există evaluări
- Polycopié Cours 4MSOP 2022Document72 paginiPolycopié Cours 4MSOP 2022marieÎncă nu există evaluări
- Rattrap de BP-2eGC - Juillet 22Document6 paginiRattrap de BP-2eGC - Juillet 22Lana LinaÎncă nu există evaluări
- Soudure PDFDocument23 paginiSoudure PDFMario StiflerÎncă nu există evaluări
- Corrigé Série TD°2Document4 paginiCorrigé Série TD°2Ami NeÎncă nu există evaluări
- TheseDocument201 paginiTheseghalem bennailaÎncă nu există evaluări
- Calcul Des Chemins de Roulement - Note de Calculs - Eurocodes ToolsDocument10 paginiCalcul Des Chemins de Roulement - Note de Calculs - Eurocodes ToolsRyad DAHMANIÎncă nu există evaluări
- Poteau TraverseDocument4 paginiPoteau TraverseRafik SaadaÎncă nu există evaluări
- Cale Reglable PDFDocument23 paginiCale Reglable PDFAmine MohamedÎncă nu există evaluări
- (TDP) (CO) Transmission de Puissance PDFDocument16 pagini(TDP) (CO) Transmission de Puissance PDFabdelhalimÎncă nu există evaluări