Documente Academic
Documente Profesional
Documente Cultură
2 3 PDF
Încărcat de
hana tiTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
2 3 PDF
Încărcat de
hana tiDrepturi de autor:
Formate disponibile
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
CHAPITRE 2
----------
CALCUL DU
CYCLE THERMODYNAMIQUE
DES TURBOMACHINES
PAR
Jean-Pierre DEVAUX Catherine DEVAUX
Professeur de Turbomachines Professeur de Turbomachines
© 2017, Jean-Pierre et Catherine DEVAUX
Edition au 01/09/2017
Tous droits de traduction, d’adaptation et de reproduction,
par tous procédés, y compris la photographie et le microfilm
réservés pour tous pays.
Calcul du cycle d’adaptation - Edition au 01/09/2017 -1-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
PLAN GENERAL DU CHAPITRE
AVANT-PROPOS
NOTATIONS
1. ARCHITECTURE DES TURBOMACHINES
1.1 Choix du nombre de flux
1.2 Choix du nombre de corps
1.3 Influence des autres paramètres
1.4 Cas des turbomoteurs, turbopropulseurs et turbines à gaz
1.5 Choix d’une architecture
2. HYPOTHESES DE BASE DU CALCUL - DEFINITIONS
2.1 Hypothèses générales
2.2 Caractérisation des composants tournants : compresseur et turbine
2.3 Composants liés à la combustion : chambre de combustion et rechauffe
2.4 Caractérisation des autres composants
2.5 Caractérisation des autres pertes
2.6 Caractérisation de l’enthalpie massique des gaz
3. CARACTERISATION DES COMPOSANTS D’UNE TURBOMACHINE
3.1 Turboréacteur double corps double flux avec rechauffe
3.2 Turbomoteur, turbopropulseur et turbine à gaz
4. CALCUL DES PERFORMANCES DES TURBOMACHINES
4.1 Poussée
4.2 Poussée spécifique
4.3 Consommation spécifique
4.4 Rendements propulsif, thermopropulsif et thermique
4.5 Paramètres liés aux choix de conception
CONCLUSION
ANNEXES :
A1. APPROXIMATION PAR LA METHODE DES GAZ PARFAITS
APPROCHEE
A2. BIBLIOGRAPHIE
Calcul du cycle d’adaptation - Edition au 01/09/2017 -2-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
AVANT-PROPOS
Le calcul des performances avion, objet du précédent chapitre, a fait ressortir pour chaque phase de
vol d’une mission, des exigences de performances moteur généralement exprimées en terme de
poussée installée (F) et de consommation spécifique de carburant (CS).
Le but du présent chapitre est de montrer comment, à partir d'hypothèses simples, un moteur peut
être modélisé thermodynamiquement et quelles performances y sont associées.
Partant de l'ensemble des missions spécifiées par l’avionneur, la figure 1 présentant un exemple de
mission d’interception, le motoriste va procéder à une première hiérarchisation par type de missions
(court courrier, long courrier, …, pour les avions civils, attaque au sol, interception, entraînement,
..., pour les avions militaires), puis à une seconde hiérarchisation relative aux phases de vol
constituant ces missions (accélération, montée, virage, ...). Il déterminera ainsi quatre à cinq phases
de vol cruciales pour la tenue des objectifs assignés à l'avion, classées :
- soit par fréquence d'occurrence à iso endommagement moteur,
- soit par degré d’importance quant à l’endommagement moteur,
- soit par degré d’importance quant à la tenue impérative d’objectifs ponctuels.
MISSION TYPE D’INTERCEPTION
Altitude (kft)
50 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 Mach de vol
40
30
20
10
Figure 1 : mission type d’interception
Dans le cas plus complexe d’avions militaires polyvalents réalisant des missions très différentes les
unes des autres, le nombre de phases de vol considérées pourra s’élever à plus d’une dizaine.
Calcul du cycle d’adaptation - Edition au 01/09/2017 -3-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Pour chacune de ces phases de vol, le motoriste définira la performance maximale attendue (F et
CS). Il créera ensuite autant de moteurs différents que de phases de vol considérées, chaque moteur
étant optimisé pour une phase de vol donnée donc "adapté" à un cas de vol différent (altitude, Mach
de vol, régime moteur).
Les performances de chacun de ces moteurs seront ensuite évaluées dans l'ensemble du domaine de
vol avion (calcul de cycle en fonctionnement hors adaptation, objet du prochain chapitre).
Enfin, le choix définitif de l’architecture moteur se fera sur la base d'un calcul de mission complet
de l'avion motorisé par chacun de ces moteurs.
Il convient de préciser les points suivants :
1. tout calcul de performances (F, CS) dans l’ensemble du domaine de vol avion (calcul en
fonctionnement hors adaptation) nécessite de définir préalablement un cycle de
référence appelé "cycle d'adaptation".
2. les calculs de cycle moteur en fonctionnement hors adaptation ainsi que les calculs de
mission avion étant lourds et longs, il est particulièrement important de cibler très
rapidement l’architecture définitive du moteur et d'amorcer très tôt les optimisations (en
fait dés le calcul du cycle de référence).
3. l'architecture du moteur (nombre de corps, nombre de flux, présence ou non d’un
mélangeur, d’une rechauffe, ...), une fois définie à partir du cycle d’adaptation, reste en
général inchangée pour les calculs de cycle en fonctionnement hors adaptation. Les
moteurs dits à cycle variable, tels le MCV99 (figures 19 du chapitre "Introduction")
constituent une exception à cette règle qui pourrait cependant se généraliser à l’avenir.
4. on commence par une architecture simplifiée qui permet d’identifier les grands choix ;
cette architecture est par la suite rendue progressivement plus complexe au fur et à
mesure que l’on connaît mieux les composants et la position des prélèvements et
réintroductions d’air.
Bien évidemment, la plus grande partie de ce qui est exposé dans ce chapitre est applicable aux
turbomachines industrielles, marines ou terrestres. L’emploi de l’exemple avion nous permet de
couvrir le problème dans sa plus grande complexité.
Calcul du cycle d’adaptation - Edition au 01/09/2017 -4-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
NOTATIONS
Dans tout le cours, les notations suivantes seront adoptées pour les différents plans de calcul des
cycles d’une turbomachine. La figure 2 illustre cette notation dans le cas d’un moteur double corps,
double flux, comportant un "booster" entre les plans 22 et 23, une rechauffe sur les deux flux ainsi
qu’une tuyère convergente-divergente.
12 13 14 15 16
0 1 2 20 22 23 3 31 4 40 41 48 49 50 55 56 6 7 8 9
Figure 2 : notations normalisées
Le principe général est de retenir une notation en 1X sur le flux secondaire (12, 13, 14, ...), en 2X
sur les compresseurs et 4X sur les turbines. Le plan 9 n’existe que dans le cas d’une tuyère de type
convergente-divergente.
0 infini amont
1 entrée manche d’entrée d'air avion
2 entrée manche d’entrée d'air moteur
20 entrée compresseur BP ou soufflante
22 sortie compresseur BP ou soufflante (flux primaire)
12 sortie compresseur BP ou soufflante (flux secondaire)
23 sortie booster BP
13 sortie redresseur compresseur BP ou soufflante (flux secondaire)
3 sortie compresseur HP
31 entrée chambre de combustion
4 sortie chambre de combustion
40 "col" du distributeur de turbine HP
41 sortie distributeur de turbine HP
48 sortie roue de turbine HP
49 sortie distributeur de turbine BP
50 sortie roue de turbine BP
14 sortie canal flux froid (flux secondaire)
55 sortie carter structural (flux primaire)
15 sortie carter structural (flux secondaire)
56 sortie système de rechauffe (flux primaire)
16 sortie système de rechauffe (flux secondaire)
6 sortie mélangeur
7 sortie du canal avec rechauffe
8 "col" de tuyère
9 sortie de la tuyère (uniquement pour une tuyère convergente-divergente)
Calcul du cycle d’adaptation - Edition au 01/09/2017 -5-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Quant aux grandeurs thermodynamiques, les notations suivantes viennent compléter celles
présentées dans les chapitres "Rappels de Thermodynamique" et "Méthodologie générale de
conception d’un moteur et intégration des contraintes avionneurs" :
: rapport de pression (taux de compression ou taux de détente) ou efficacité
(1 - ) : perte de charge
: taux de dilution (rapport du débit d’air secondaire sur le débit d’air primaire)
: rapport de température
: proportion de débit d'air prélevé pour les refroidissements turbine
: proportion de débit d'air prélevé pour les besoins avionneur
FS : poussée spécifique (m/s si F exprimée en N)
Pour les indices, les notations suivantes seront utilisées :
i: initial
f: final
p: prélèvement
poly : polytropique
is : isentropique
enth : enthalpique
EA : entrée d'air avion
MA: manche d'entrée d'air avion
MM: manche d'entrée d'air moteur
C: compresseur
CBP : compresseur basse pression
CMP : compresseur moyenne pression
CHP : compresseur haute pression
CC : chambre de combustion
T: turbine
THP : turbine haute pression
TMP : turbine moyenne pression
TBP : turbine basse pression
MEL : mélange
PC : post-combustion (rechauffe)
TU : tuyère
TP : transmission de puissance
PP : prélèvement de puissance
Calcul du cycle d’adaptation - Edition au 01/09/2017 -6-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
1 - ARCHITECTURE DES TURBOMACHINES
L'architecture des turbomachines est directement dérivée des exigences de l’avionneur. Elle résulte
principalement de contraintes de géométrie, de consommation spécifique et de maintenance et plus
particulièrement dans le domaine des avions civils, de contraintes de bruit et de pollution (émissions
de CO, Nox, …). La poussée ou la puissance requise est un élément annexe dans la mesure où il est
généralement possible d'atteindre un objectif de poussée à partir des seuls paramètres de cycle (taux
de compression, température en entrée turbine, ...) quelque soit la géométrie requise.
L'architecture du moteur sera décrite par les paramètres suivants :
- nombre de flux d'air à l'intérieur de l’enveloppe moteur,
- nombre et type d'assemblages compresseur-turbine : cet assemblage est appelé "corps",
- type d'entrée d'air,
- existence de mélangeurs de flux d’air dans le moteur,
- existence d’une post-combustion,
- type de tuyère,
- nombre et position des prélèvements d'air et de puissance,
- existence et position d'échangeurs de chaleur,
- existence d’une turbine de puissance, liée ou non à un corps,
les deux paramètres les plus importants étant incontestablement le nombre de flux et le nombre de
corps. Pour les turbomachines qui fournissent de la puissance, le caractère libre ou lié de la turbine
de puissance est également important pour son comportement.
Au vu du nombre important de paramètres listés ci-dessus, les choix possibles sont très nombreux
(plusieurs centaines) et seule l'expérience acquise par les motoristes depuis plus de cinquante ans a
permis de dégager les solutions les plus exploitables et les plus opérationnelles. Quelques unes de
ces solutions seront développés à la fin de ce chapitre :
- mono corps, mono flux, sans rechauffe avec le moteur ATAR 8K50,
- double corps, double flux séparé, sans rechauffe avec les moteurs LARZAC et CFM56,
- double corps, double flux mélangé, avec rechauffe avec le moteur M88-2,
- turbopropulseur triple corps, simple flux, avec le moteur TP400,
- turbomoteur mono corps, simple flux RTM322 et MTR390,
- statoréacteur ASMP,
- turbomachine navale avec échangeur (TM1200 de Turbomeca).
Ce chapitre s’attache à développer les configurations les plus courantes dans l’aéronautique : la
théorie exposée ici permet toutefois de calculer tous les types de cycle, y compris les plus
"exotiques".
1.1 Choix du nombre de flux
Pour des raisons de simplicité, les premiers moteurs (JUMO 004, BMW 018, ATAR, ...) furent
développés dans une configuration dites "mono flux" ou "simple flux", un seul flux d’air traversant
le moteur.
Grâce aux avancées technologiques réalisées dans les années 50, cette configuration fut
progressivement remplacée dans les années soixante par une configuration dite "double flux",
l’objectif étant de réduire dans un premier temps la consommation de carburant. En effet, les calculs
de cycle montrent que le taux de dilution a une influence capitale sur le niveau de consommation
Calcul du cycle d’adaptation - Edition au 01/09/2017 -7-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
spécifique du moteur (voir figure 17 du chapitre 1). Dans un deuxième temps, cette architecture a
permis de respecter les normes de bruit imposées dans les années 70-80 tout en réduisant
drastiquement la consommation de carburant. C’est pourquoi la quasi totalité des avions sont
aujourd’hui équipés de turboréacteurs double flux. Seuls les turbomoteurs d'hélicoptère et les
turbines à gaz industrielles ou marines sont encore simple flux.
Le choix du nombre de flux se fait dans le cadre des contraintes de volume disponible sur avion
(hauteur sous voilure ou maître couple maximum du fuselage), de rayon d’action (consommation
spécifique) et de respect des normes de bruit.
Le bruit d’un aéronef est principalement lié au bruit de jet : on montre que la puissance acoustique
émise par un jet est d’autant plus importante que la turbulence est grande. Or les deux paramètres
les plus influents sur le phénomène sont la température et la vitesse d’éjection des gaz qui devront
donc être réduites autant que faire se peut. A contrario, la poussée d'un moteur est directement
proportionnelle à la vitesse d'éjection des gaz et au débit d'air éjecté (voir paragraphe 4.1). Or, d’une
part, la vitesse d'éjection est d'autant plus grande que le flux d'air est chaud et d’autre part, plus le
débit est grand, plus le maître couple du moteur l’est aussi. Un travail d’optimisation sera donc
nécessaire afin de respecter les différents objectifs spécifiés.
Pour les avions militaires, la réduction de la température en sortie du jet résulte aussi des besoins de
réduction de la signature infrarouge.
Le motoriste se retrouve donc face à un dilemme dont la résolution tient avant tout à la position des
moteurs sur l’avion et aux types de mission spécifiées à l'avion :
- sur un avion civil, les moteurs étant placés sous voilure, de part et d’autre de la dérive ou
au pied de la dérive elle-même, c’est le niveau de consommation de carburant et le
respect des normes de bruit et de pollution qui se révèlent les plus contraignants à
atteindre. En général, l’architecture retenue est un moteur double flux à grand taux de
dilution ( supérieur à 3), c'est à dire un grand débit d'air "froid" par rapport au débit d'air
"chaud" du flux primaire. La taille du moteur est souvent une contrainte pour l’avionneur
(cas du train de l’Airbus A380 et du Boeing B777),
- pour les avions militaires, c’est la contrainte de maître couple maximum qui est
importante puisqu’elle conditionne la traînée avion. La poussée requise devra être
réalisée avec un débit d’air faible donc un taux de dilution nul. Cependant, les contraintes
de rayon d’action en zone de combat et de nature thermique (refroidissement du canal de
rechauffe, diminution de la signature infrarouge) nécessitent l'existence d'un flux froid.
En général, la solution retenue est un moteur double flux ayant un taux de dilution assez
modéré ( inférieur à 0,5). Il peut atteindre 1 à 2 pour les avions furtifs : l’évolution des
conflits depuis 1989 et la nécessité de réduire le bruit à l’entraînement pourraient
conduire à une rupture d’ici quelques années,
- dans le cas d'un statoréacteur, la contrainte d’efficacité de la propulsion est primordiale,
ce qui impose une architecture simple flux : généralement utilisée pour les missiles, cette
solution est renforcée par la contrainte de compacité,
- pour les turbomoteurs d’hélicoptères, l’architecture est là aussi simple flux, la contrainte
géométrique étant primordiale (volume faible). Le respect des normes de bruit se révèle
moins ardu que sur les avions civils ou militaires, le jet étant moins énergétique puisque
la détente se fait majoritairement dans la turbine de puissance et non au niveau de la
tuyère. Enfin, le niveau des émissions infrarouges dépend surtout de la position de la
tuyère moteur par rapport à la voilure tournante,
Calcul du cycle d’adaptation - Edition au 01/09/2017 -8-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
- pour les turbines industrielles ou marines, la solution retenue est un moteur simple flux,
d'une part pour des raisons de simplicité, d'autre part parce que les exigences d'émissions
acoustiques ou infrarouges sont nettement moins contraignantes, les possibilités de
contrer ces émissions par des installations externes étant moins chères que les systèmes
intégrés. Le gain en consommation spécifique (CS) est obtenu par l’introduction de
systèmes d’échangeurs en général trop lourds pour être portés par des systèmes volants.
1.2 Choix du nombre de corps
Pour les mêmes raisons de simplicité, les premiers moteurs ont longtemps été monocorps, à savoir
un compresseur entraîné par une turbine, la turbine de puissance étant couplée à cet arbre unique
lorsque cela s'avérait nécessaire.
L'idée de double corps apparaît assez vite dans la théorie, mais ne sera appliquée réellement que
dans les années soixante. Elle nécessitait en effet une maîtrise de la mécanique des paliers et de la
mécanique vibratoire. Elle est aujourd'hui communément adoptée pour les turboréacteurs civils et
militaires.
La multiplication des corps permet en effet de bénéficier d’une plus grande souplesse d’adaptation
des compresseurs et des turbines (réduction de masse), au détriment cependant d’une complexité
technologique accrue (paliers inter arbres, paliers contrarotatifs haute vitesse) et d’un risque
vibratoire accru.
Rolls-Royce est aujourd’hui le seul motoriste à avoir développé des moteurs triple corps (famille
Trent par exemple). Aucun motoriste n'est allé au delà, les effets gyroscopiques devenant trop
importants. Il convient d’ailleurs de noter que la solution triple corps a longtemps été déclinée de
manière homothétique pour éviter de sortir des technologies maîtrisées.
Nous verrons plus loin dans le cours que pour un même taux de compression, il est plus efficace
d'avoir deux compresseurs accolés l'un à l'autre plutôt qu'un seul. En particulier, le nombre d'étages
total des deux compresseurs est alors inférieur à celui du compresseur unique. On retrouve le même
type de raisonnement pour les turbines.
Il convient toutefois de noter que plus le nombre de corps augmente, plus les opérations de
maintenance (démontage du moteur en modules) deviennent longues et complexes. De plus, à partir
de trois corps, la complexité mécanique s'accroît sensiblement puisqu'il faut développer des paliers
différentiels permettant de subir des vitesses de rotation très importantes. Enfin, le
dimensionnement vibratoire se complexifie fortement avec notamment l'existence d'effets
gyroscopiques qui nécessitent de faire tourner l’un des corps en contrarotatif. L'avantage de masse
obtenu s'efface alors assez vite.
En pratique, le nombre de corps optimum est donc de deux pour un turboréacteur civil ou militaire.
Pour les turbomoteurs, le nombre de corps est en partie lié à la puissance à fournir mais surtout au
volume réservé au moteur (hélicoptère). Si la puissance est faible, alors on se contente en général
d'un monocorps. Dans le cas d'une puissance élevée, l'architecture double corps est optimale.
Notons que seule une combinaison compresseur axial suivi d’un compresseur centrifuge est alors
possible.
Pour les turbines à gaz industrielles, la contrainte de masse ne joue pas et on pourrait retenir une
architecture monocorps : en pratique, ces machines étant dérivées de machines aéronautiques, le
double corps se généralise.
Calcul du cycle d’adaptation - Edition au 01/09/2017 -9-
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Il est en effet très difficile et très coûteux de mettre au point un corps haute pression : la structure
double corps permet ainsi de décliner cet investissement sur un nombre important de "dérivés" avec
un minimum d’adaptation. A titre d’exemple, le moteur civil CFM56 (double corps, double flux à
grand taux de dilution) est dérivé du moteur militaire GE F101 (double corps, double flux à faible
taux de dilution), ces deux moteurs ayant le même corps haute pression : la dérivation a été réalisée
en modifiant les parties basses pressions (compresseur basse pression et turbine basse pression). Le
développement du turbopropulseur TP400 sur la base du corps haute pression du turboréacteur
M88-2 en est un autre exemple.
1.3 Influence des autres paramètres
L'influence des autres paramètres est moins critique et peut faire l'objet d'études spécifiques lors des
calculs de cycle. Il est cependant nécessaire de connaître leurs influences a priori, exposées ici
succinctement, sachant que les critères relatifs à ces choix seront précisés dans les cours relatifs aux
composants (chapitres 6 à 10).
Type d’entrée d’air
Les entrées d'air peuvent être de deux natures : entrée d'air dynamique ou entrée d'air statique.
L'entrée d'air dynamique permet de transformer la vitesse de l'air (V0) en pression et évite ainsi
au moteur de trop comprimer à fort Mach : elle est donc particulièrement bien adaptée aux moteurs
qui doivent fonctionner à grande vitesse de vol et passer de gros débits à ces vitesses. Les entrées
d’air dynamiques peuvent être à géométrie variable pour s’adapter en permanence aux conditions de
vol.
Les entrées d'air statiques sont inutilisables à grande vitesse : elles seront donc employées
principalement pour des moteurs d'aéronefs se déplaçant à faibles vitesses, comme les hélicoptères,
et dont le débit d’air reste faible. Il convient de noter qu'au décollage et pour des moteurs ayant un
débit d'air moyen, les avantages des deux types d'entrée d'air se confondent : si la contrainte
opérationnelle conduit à fonctionner dans des conditions à forte probabilité d'ingestion de corps
étrangers, une entrée d’air statique au décollage peut s'avérer plus appropriée qu'une entrée d'air
dynamique, au prix cependant d'une certaine complexité pour revenir ensuite au cas de l'entrée d'air
dynamique (entrée d’air évolutive du MiG-29, voir chapitre 6). Les entrées d'air de turbines
industrielles sont systématiquement statiques, les contraintes de vol n'existant pas. Les
statoréacteurs sont par contre systématiquement dotés d'une entrée d’air dynamique, seul moyen de
comprimer l'air.
Le chapitre 6 détaillera l’ensemble des méthodes liées au dimensionnement et au fonctionnement de
ces différents types d’entrées d’air.
Existence de mélangeurs
Si le moteur est double flux, la question de l'implantation d’un mélangeur en sortie de turbine et en
amont de la tuyère entre les plans 15-16 et 55-56 (voir figure 2) se pose. Aujourd’hui, la plupart des
moteurs militaires ont systématiquement un mélangeur dans la mesure où il faut apporter de l'air
"frais non vicié" à la rechauffe et limiter le transfert de chaleur entre les gaz chauds du flux primaire
et la peau de l’avion. Dans certain cas, la contrainte de furtivité infrarouge peut aussi conduire à
imposer le mélange, le flux froid masquant le flux chaud. Dans le cas des moteurs civils, on
constate que les moteurs associés à des avions long courrier sont des moteurs à flux mélangés,
principalement pour réduire la consommation spécifique en croisière. Par contre, pour les avions
court courrier, les moteurs à flux non mélangés sont largement plus économiques.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 10 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Existence d’une rechauffe (post-combustion)
L'implantation d'une rechauffe est liée au domaine de vol dans lequel doit évoluer l’avion et à la
nécessité d’apporter instantanément un complément de poussée dans certaines phase de vol
(décollage, passage du mur du son, …). En effet, il n'est pas forcément nécessaire d'avoir une post-
combustion allumée pour voler à des faibles Mach de vol supersoniques (Mach inférieur à 1,3-1,5)
si l’avion dispose d’une faible traînée aérodynamique : c’est ainsi le cas du Rafale et du F-22 qui
sont tous deux capables de voler en supersonique sans allumer la post-combustion et le terme de
"super croisière" est alors utilisé ("super cruise" pour les américains). Elle est cependant toujours
indispensable pour faire du haut supersonique (Mach de vol supérieur à 1,5).
Dans le cas du statoréacteur, la rechauffe et la chambre de combustion sont confondues, une
chambre de combustion classique ne pouvant supporter les conditions de fonctionnement en sortie
d'un compresseur supersonique.
Les turbomoteurs et les turbines à gaz industrielles ne sont quant à eux, jamais dotés de rechauffe,
le besoin étant en puissance et non en poussée.
Le chapitre 9 détaillera l’ensemble des méthodes liées au dimensionnement et au fonctionnement du
système de rechauffe.
Type de tuyère
Le choix de la tuyère est principalement lié au domaine de vol de l'aéronef considéré. Dans une
première approche, les orientations suivantes peuvent être appliquées. Pour les moteurs destinés à
des avions subsoniques ou légèrement supersoniques (Mach de vol inférieur à 1,3-1,4), la tuyère
convergente est un bon compromis entre performances et masse.
L’existence d’une rechauffe impose une tuyère à section donc géométrie variable.
Par contre, à plus forts Mach de vol, une tuyère convergente-divergente à géométrie variable
devient indispensable pour améliorer les performances moteur et ceci d’autant plus que le moteur a
un taux de compression élevé et donc que la pression totale dans le plan 7 est importante. Ce dernier
type de tuyère est également indispensable pour les moteurs à poussée vectorielle.
Pour les turbomoteurs et les turbines à gaz, la tuyère est de type simplement divergente, la section
de tuyère permettant de déterminer la puissance maximale pouvant être prélevée.
Le chapitre 7 détaillera l’ensemble des méthodes liées au dimensionnement et au fonctionnement
des différents types de tuyère.
Position des prélèvements d'air et de puissance
La position des prélèvements d'air et de puissance dépend des exigences de l’avionneur exprimées
en termes de débit et de température pour ce qui concerne le premier type de prélèvements.
Les prélèvements d'air sont généralement réalisés dans les zones à forte pression, donc
principalement dans les deniers étages du compresseur haute pression. Une partie des prélèvements
d’air est en outre destinée au moteur lui-même (refroidissement turbine, dégivrage, …) et le
positionnement dépend alors des contraintes de cycle (pression et température) et du souci
d’optimiser le cycle en ajustant au juste besoin le débit prélevé. Enfin, certains prélèvements sont à
caractère temporaire et permettent de gérer des situations critiques des moteurs (vannes de décharge
du compresseur basse pression).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 11 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Le prélèvement de puissance sur les moteurs double corps nécessite quant à lui, une réflexion plus
approfondie : si l'on recherche avant tout la stabilité, il est indispensable de prélever sur le corps le
plus stable, à savoir le corps haute pression. Cette configuration présente également l'intérêt de
permettre un démarrage rapide du moteur, la puissance d'entraînement mécanique nécessaire au
démarrage du moteur passant par la même voie. Cette solution étant techniquement plus délicate à
réaliser qu'une prise sur le corps basse pression, la prise sur l'arbre basse pression peut également
être choisie pour simplifier la maintenance au risque d'une plus grande variation de la puissance
disponible et de temps de démarrage plus longs. L’expérience actuelle est plutôt de réaliser ces
prélèvements de puissance sur l'arbre basse pression. L’introduction de groupe auxiliaire de
puissance dans les avions, l’optimisation de l’énergie à l’intérieur du système avion et l’évolution
vers des avions "tout électrique" remettent en cause les architectures classiques.
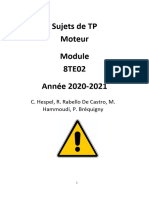
Existence d’échangeurs
La présence d'un ou plusieurs échangeurs au sein d’une turbomachine peut s’envisager à deux titres.
Dans le premier cas, par la nécessité, à pression donnée, de refroidir de l’air pour ventiler des
parties chaudes, si le motoriste ne dispose pas du couple (pression, température) adapté. C’est le cas
par exemple du moteur russe AL-31F qui, faute d’une technologie adaptée au niveau des aubes de
turbine haute pression (matériau haute température et technologie des circuits de ventilation), est
obligé de refroidir l’air prélevé au sein du compresseur haute pression au travers d’un échangeur
placé dans le canal secondaire du moteur.
échangeur
Figure 3 : moteur AL-31F
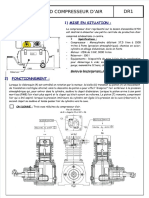
Dans le second cas, l’objectif est de récupérer une partie de l’énergie thermique disponible dans les
gaz d’échappement en sortie de la turbine de puissance (récupérateur), pour chauffer "gratuitement"
l’air en entrée de la chambre de combustion et ainsi accroître son rendement de combustion.
Cette architecture est plus particulièrement adaptée aux cas des turbines industrielles ou marines où
le facteur masse est moins primordial (voir ci-contre la turbine marine WR21 installée sur la frégate
Horizon).
Un dispositif complémentaire, "l’intercooler", placé entre les compresseurs BP et HP, permet quant
à lui de refroidir l’air entre ces deux compresseurs afin de limiter l’énergie nécessaire à la
compression et se rapprocher ainsi de l’adiabatique.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 12 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
échappement
eau
inter
cooler
récupérateur
entrée vanne de dérivation
d’air
arbre
moteur
chambre de
combustion
TUBP turbine
COBP COHP de puissance
TUHP
distributeur
variable
Figure 4 : schéma de principe de la turbine à gaz WR21
1.4 Cas des turbomoteurs, turbopropulseurs et turbines à gaz
Pour ce type de turbomachines, il faut produire une puissance et non une poussée. Cette puissance
sera prélevée par une turbine de puissance qui remplace fonctionnellement la tuyère des moteurs
d'avion.
Deux architectures sont possibles pour l'implantation de cette turbine :
- la turbine de puissance est liée à l'arbre basse pression de la turbine à gaz : l’architecture
est alors dite à turbine liée,
- la turbine de puissance est totalement découplée des arbres compresseur/turbine :
l’architecture est alors dite à turbine libre.
Le choix de l’une ou l’autre de ces deux architectures résulte avant tout du mode de fonctionnement
requis.
La turbine liée permet de réaliser une gamme étendue de puissance sans avoir à modifier la vitesse
de rotation du générateur de gaz au détriment quelquefois des marges au pompage.
La turbine libre, par contre, nécessite une régulation des deux ensembles, mais permet un
fonctionnement beaucoup plus sain du compresseur et, de par sa conception, offre une maintenance
plus aisée.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 13 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
1.5 Choix d'une architecture
Le choix de l’architecture du moteur résulte donc d'un compromis entre de nombreuses contraintes.
Les réajustements en cours de calculs étant difficiles, il convient de particulièrement bien définir
cette architecture avant de se lancer dans les calculs détaillés de cycle, les performances obtenues en
dépendant directement.
Dans la pratique, les motoristes raisonnent par famille de moteurs, chaque famille étant développée
autour du même corps haute pression en ne modifiant généralement que les composants basse
pression, à l’instar pour Snecma de la famille CFM-56 dans le domaine civil et des familles ATAR,
M53 et M88 dans le domaine militaire, ce qui permet bien évidemment de simplifier largement
cette phase.
Cependant, il arrive quelquefois que de profondes remises en cause soient nécessaires, d'où
l’obligation pour les motoristes de disposer d’équipes d’avant-projets capables d’imaginer et
d’évaluer constamment l’intérêt de nouvelles architectures moteurs plus ou moins "exotiques"
(super-statoréacteur, moteurs à cycle variable, …) au vu de l’évolution des architectures avions, des
technologies, des procédés de fabrication et de réparation et des contraintes réglementaires ou
économiques.
2 - HYPOTHESES DE BASE DU CALCUL - DEFINITIONS
2.1 Hypothèses générales
Les hypothèses généralement considérées sont les suivantes :
1. Les écoulements d’air sont, au moins en moyenne, stationnaires. Cette hypothèse se
traduit mathématiquement par l’équation :
f 0 où f est l'une quelconque des fonctions utilisées.
t
Ce choix résulte du fait que le cycle de référence du moteur est étudié en régime établi
et permanent. Les effets turbulents sont donc négligés, ainsi que tous les phénomènes
instationnaires : on reporte leurs effets au niveau des pertes de charge et des
rendements.
2. Les écoulements d’air sont monodimensionnels. Cette hypothèse est bien sûr
simplificatrice, notamment pour les entrées d'air et les tuyères (on néglige notamment
les distorsions de pression, de vitesse, de température, …), mais elle très largement
suffisante pour calculer les performances de cycle, sous réserve d'introduire des pertes
de charge, des températures de sortie chambre ou des rendements qui prennent en
compte les déperditions résultantes des différentes couches limites, distorsions et
phénomènes secondaires rencontrés. Cette hypothèse ne sera remise en cause que dans
les calculs de dimensionnement des composants.
Les pertes de charge de couches limites seront intégrées dans les pertes de charge et les
rendements considérés dans le calcul.
3. Les écoulements d'air en dehors de la chambre de combustion et de la rechauffe
sont adiabatiques. Cette hypothèse n'est qu'approximative en particulier pour le flux
secondaire qui évacue une partie de la chaleur accumulée par les carters de chambre de
combustion ou pour les flux d'air de refroidissement des aubes de turbines. Compte tenu
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 14 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
des flux de chaleur associés, nous pourrons considérer que ces apports de chaleur sont
négligeables en regard du résultat final, au moins dans une première étape où la
géométrie des composants est inconnue. Une fois cette géométrie connue, il sera
nécessaire de quantifier plus précisément ces flux pour connaître leur effets. Notons
néanmoins que pour les échanges entre flux primaire et flux secondaire, sous réserve
qu’il y ait mélange, cette hypothèse ne constitue que le choix d’un chemin particulier
pour l’application du premier principe.
4. Description des composants. Tous les composants seront décrits comme des "boites
noires" avec des entrées et des sorties (pression, température, débit, richesse, travail, …)
et un processus. A ce stade, la géométrie des composants n’est pas atteignable faute, la
plupart du temps, d’hypothèses sur les vitesses ou Mach maxi ou mini. Les grandeurs de
pression et de température considérées sont les grandeurs totales puisque seules ces
valeurs permettent d’appliquer les principes de la Thermodynamique. Les boites seront
ajustées pour rendre possible l’application des principes de la Thermodynamique. Dans
tous les cas, pour appliquer les principes de la Thermodynamique, il y a conservation
des débits entre l’entrée (ou la somme des entrées) et la sortie (ou la somme des
sorties) de la boite.
2.2 Caractérisation des composants tournants : compresseur et turbine
Nous décrirons le compresseur par une compression thermodynamique réelle suite à un apport
simple de travail sans échange de chaleur et la turbine par une détente réelle par fourniture de
travail sans échange de chaleur.
Nous introduirons le caractère réel, soit par un rendement polytropique qui sera représentatif d'un
rendement technologique (et permet ainsi une comparaison avec les rendements d'autres moteurs),
soit par un rendement isentropique qui compare travail réel et travail isentropique du composant. Le
rendement polytropique est préférable dans la mesure où un rendement polytropique est quasiment
constant sur tous les étages d'un compresseur ou d'une turbine, ce qui est loin d'être le cas d'un
rendement isentropique.
Dans le cas d’une turbine refroidie, le rendement incorporera les conséquences des différents
mélanges d'air résultant du refroidissement de la turbine : il faudra néanmoins traiter d’une manière
ou d’une autre la réintroduction de flux d’air : la notion de rendement est alors affectée.
Bien qu’il soit possible d’utiliser la notion de rendement isentropique sur un ensemble comportant
plusieurs entrées de débit et plusieurs sorties, il est préférable d’éviter cette situation et de limiter
l’emploi de la notion de rendement à un processus d’apport de puissance sur un débit constant mono
entrée et mono sortie. C’est encore plus vrai pour la notion de rendement polytropique qui est
particulièrement sensible au chemin thermodynamique utilisé comme nous le verrons sur les
turbines refroidies mais aussi sur les compresseurs lors d’un prélèvement d’air.
2.3 Composants liés à la combustion : chambre de combustion et rechauffe
Le comportement des composants liés à la combustion se fera au travers d'un apport simple de
chaleur sans échange de travail.
Rendement de combustion
Le degré d'avancement des réactions chimiques dans le composant est caractérisé par un rendement
dit "rendement de combustion" noté comb qui affecte le pouvoir calorifique du carburant,
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 15 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
autrement dit sa capacité à transformer l’énergie chimique du carburant en chaleur absorbée par
l’air :
comb
D 4 H(T4 , 4 ) D 31 H(T31 , 31 ) (chambre de combustion)
Dc CC PCI
C’est un rendement dit "rendement enthalpique". Il est défini comme le rapport de la variation
d'énergie (variation d’enthalpie massique) dans la chambre sur la quantité de chaleur minimale
théorique apportée par le carburant injecté DcCC.
Efficacité
L’efficacité globale comb de ces composants sera principalement constituée des termes suivants :
comb aérodynamique géométrie thermique
avec : (1 - aérodynamique) : perte de charge résultant du comportement aérodynamique
(frottements, couches limites, …),
(1 - géométrie) : perte de charge résultant de la géométrie de la chambre
(éclatement brusque, présence d’obstacle, …),
(1 - thermique) : perte de charge résultant de l’accroissement de température.
Dans la pratique, nous donnerons comb sans distinguer l'origine des différentes pertes associées.
Les distorsions de température sont négligées à ce stade.
2.4 Caractérisation des autres composants
L’efficacité des entrées d'air EA sera caractérisée par l'équation suivante :
EA = aérodynamique . choc
avec : (1 - aérodynamique) : perte de charge résultant du comportement aérodynamique,
(1 - choc) : perte de charge due aux chocs dans l'entrée d'air (cf chapitre 6).
Le même type de modélisation est repris pour les tuyères. Quant aux diffuseurs et aux liaisons inter
composants, la perte de charge due aux chocs y est nulle.
La perte de charge d’un mélangeur sera caractérisée par l'équation suivante :
MEL aérodynamique géométrie
avec : (1 - aérodynamique) : perte de charge résultant du comportement aérodynamique,
(1 - géométrie) : perte de charge résultant de la géométrie du mélangeur.
2.5 Caractérisation des autres pertes
Deux autres pertes doivent être quantifiées avant de pouvoir amorcer les calculs :
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 16 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
- la transmission de puissance entre la turbine et le compresseur se fait avec des pertes qui
seront caractérisées par un rendement TP dit "rendement de transmission de puissance".
Ces pertes sont représentatives des frottements mécaniques au niveau des liaisons et des
paliers,
- la transmission des prélèvements de puissance sur arbre se fait avec des pertes qui seront
caractérisées par un rendement PP dit "rendement de prélèvement de puissance". Ces
pertes sont, là encore, représentatives des frottements mécaniques.
Nous considérerons par ailleurs que les prélèvements d'air se font de manière isentropique,
hypothèse simplificatrice mais dont l’impact est mineur.
2.6 Caractérisation de l’enthalpie massique des gaz
Jusqu’à l’entrée de la chambre de combustion, le gaz à considérer est de l’air pur, mélange d’azote
(N2) et d’oxygène (O2) sauf mention spéciale. En sortie de la chambre de combustion, le gaz est
alors un mélange d’air, de monoxyde et/ou de dioxyde de carbone (CO et CO2), de monoxyde et/ou
de dioxyde d’azote (NO et NO2), d’eau (H2O), d’imbrûlés (CXHY), …, obtenus lors de la réaction
chimique.
On montre dans le chapitre 8 relatif à la combustion que la conservation des espèces dans une
réaction chimique permet de dire que l’enthalpie massique d’un mélange gazeux est égale à la
somme de l’enthalpie massique de l’air HAIR et de celle du carburant HCARB, enthalpies calculées à
la température du fluide T et pondérées de leurs débits propres (voir annexe 5 du Mémento).
Nous modéliserons donc les gaz en sortie de la chambre de combustion par le mélange du débit
d’air entrant Da et du débit de carburant injecté Dc :
Da H AIR (T) Dc H CARB (T) Da Dc H(T, )
Da H AIR (T ) Dc H CARB (T ) Dc
d’ou : H (T , ) avec :
Da Dc Da
3 - CARACTERISATION DES COMPOSANTS D’UNE TURBOMACHINE
Dans cette partie du cours, nous allons détailler le calcul des caractéristiques thermodynamiques des
différents modules constituant une turbomachine. Le cas présenté est celui d'un moteur double
corps, double flux à flux mélangés, avec rechauffe et tuyère convergente-divergente, ce qui permet
d'utiliser la totalité des "modules" constituant une turbomachine, à l’exception des échangeurs qui
seront traités à part. L’annexe A.1 présente le calcul détaillé avec applications numériques. Le cas
particulier des calculs de turbomoteurs est présenté au paragraphe 4.5.
3.1 Calcul détaillé des performances d'un turboréacteur double corps double flux
Le moteur considéré est un moteur double corps double flux doté d'une entrée d'air dynamique (voir
figure 5). La séparation des flux se fait après le compresseur BP (plans 22 et 12) et le mélange des
deux flux après le carter d’échappement et juste avant la rechauffe (plans 56 et 16). Les
prélèvements d'air se font en aval du compresseur HP (plans 3 à 31). Le prélèvement de puissance
se fait sur l'arbre HP.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 17 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
12 13 14 15 16
0 1 2 20 22 3 31 4 40 41 48 49 50 55 56 6 7 8 9
Figure 5 : schéma d’un moteur double corps double flux
Nous préciserons à chaque étape les différents types de paramètres nécessaires à la réalisation des
calculs. Ces paramètres seront de trois types :
- les paramètres représentant des contraintes avionneur : ces contraintes se déclinent soit
en besoins en prélèvements d’air et de puissance, soit en limites en termes
d’encombrement, de masse, etc. Ces contraintes peuvent faire l’objet de négociations,
mais sont assez rapidement considérées comme figées dans un développement,
- les paramètres représentant des limitations technologiques : ces paramètres constituent
des limites pratiques incontournables qui ne varient qu'avec des avancées technologiques
majeures, soit dans le domaine des matériaux, soit dans le domaine des technologies,
mais aussi grâce à l’utilisation de codes de calcul de plus en plus performants (code
Navier-Stockes 3D instationnaires, etc.),
- les paramètres représentant des choix de conception : ces paramètres sont des paramètres
libres qui sont choisis par le motoriste pour tenir les objectifs de dimensionnement. Le
caractère libre signifie que le nombre d’équations étant inférieur au nombre d’inconnues,
il existe un vaste champs de solutions possibles à un problème donné, toutes aussi
valables les unes que les autres, les seules limitations étant imposées par les technologies
disponibles au moment du dimensionnement (taux de compression maximal par étage,
température entrée turbine maximale, etc.). Ces choix font l’objet de "Pratiques de
conception" qui permettent de reproduire rapidement des solutions optimisées existantes.
Conditions amont - Plan 0
Le calcul des conditions amont permet de passer des valeurs statiques (Ts0, Ps0) représentatives du
point du domaine de vol considéré (altitude Z, Mach de vol M0 et delta par rapport à l’atmosphère
standard ISA) aux valeurs totales qui tiennent compte de la vitesse d'avancement de l'avion (Mach
de vol M0). Le processus étant isentropique, nous aurons :
en gaz parfaits en gaz réels
0
1 1
. P0 Ps 0 1 0 M 0 2 0 (1) . P0 Ps 0 10 (T0 , 0 ) (Ts 0 , 0 ) (1r)
2
1 V 2
. T0 Ts 0 1 0 M02 (2) . H(T0 , 0 ) H(Ts 0 , 0 ) 0 (2r)
2 2
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 18 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
avec : V0 M 0 0 R Ts 0 où, pour mémoire : 0 f (Ts 0 , 0 ) (3)
Les pression et température statiques Ps0 et Ts0 sont déterminées à partir des formules données en
annexes 9 et 10 du Mémento pour une atmosphère standard (ISA) et l'altitude Z et le Mach de vol
M0 considérés avec, en règle générale, une viciation de l’air nulle : 0 = 0, sauf mention spéciale.
Entrée d'air avion - Plans 0 à 1
L'entrée d'air avion se situe classiquement entre les plans 0 et 1. L’évolution adiabatique sans
échange de chaleur et sans perte de débit de l’écoulement le long du tube de courant entraîne les
relations suivantes valables en gaz réels et gaz parfaits :
. P1 P0 EA (4)
. T1 T0 (5)
. Da 1 Da 0 (6)
. D1 D 0 Da 1 (1 1 ) (7)
. 1 0 (8)
Le seul paramètre nécessaire au calcul de ce module "entrée d’air" est la perte de charge (1 - ).
Cette perte de charge est directement liée à la conception de l'entrée d'air puisqu'elle résulte des
pertes dues aux chocs ou aux poches supersoniques qui pourraient s’y créer. Le calcul de cette perte
de charge est détaillé dans le chapitre 6. De manière simplifiée, peut être définie à partir de la
loi AIAA suivante :
. pour M 0 1, EA 1 (9)
. pour M 0 1, EA 1 0,075 (M 0 1)1,35 (10)
Il s'agit donc soit d'une contrainte avionneur, si l'entrée d'air doit s'intégrer dans l'avion existant et
représente une réelle contrainte (cas des avions militaires), soit d'un choix de conception, si une
certaine liberté reste au motoriste pour concevoir son entrée d'air (cas de la plupart des avions
civils). Cette perte de charge n’est prise en compte que pour le calcul des "performances installées"
du moteur dans l’avion et n’existe donc pas au banc d’essais. Comme nous le verrons au chapitre 6,
cette manche peut incorporer des systèmes "additionneurs" de flux (pelles, …) ou séparateurs de
flux pour adapter le débit d’entrée d’air à celui nécessaire au moteur.
Manche d’entrée d'air avion - Plans 1 à 2
La manche d'entrée d'air avion se situe classiquement entre les plans 1 et 2. Dans le tube de courant
qui mène au moteur, l’évolution adiabatique et sans perte de débit de l’écoulement entraîne les
relations suivantes valables en gaz réels et en gaz parfaits :
. P2 P1 MA (11)
. T2 T1 (12)
. Da 2 Da 1 (13)
. D 2 D1 (14)
. 2 1 (15)
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 19 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Le seul paramètre nécessaire au calcul de ce module "manche d’entrée d’air avion" est la perte de
charge (1 - ). Le calcul de cette perte de charge est détaillé dans le chapitre 6. Il s'agit d'un
choix de conception. Pour les manches d’entrée d’air d'avions civils qui sont en général très courtes,
le rendement est de l'ordre de 0,98-0,99. Pour les manches d’entrée d’air d'avions militaires longues
en général de 4 voire 5 mètres, le rendement est beaucoup plus faible avec une valeur minimale
pour le Mach de vol M0 = 0. Sa valeur augmente ensuite avec le Mach de vol tant que celui-ci reste
subsonique (phénomène de Venturi). Cette perte de charge n’est prise en compte que pour le calcul
des "performances installées" du moteur dans l’avion. Notons que le débit de l’entrée d’air avion
peut différer du débit d’air moteur par la présence de pièges à couches limites et de trappes dont
l’objectif est de limiter les pertes de charge (couches limites plus faibles en entrée compresseur) et
la distorsion en entrée compresseur.
L’hypothèse adiabatique peut être remise en cause si la manche dispose d’un système d’anti-
givrage. La rareté de ce dispositif et sa faible influence sur des moteurs de gros débit permet
toutefois de le négliger en premier abord.
Manche d’entrée d'air moteur - Plans 2 à 20
La manche d'entrée d'air moteur se situe classiquement entre les plans 2 et 20. L’évolution
adiabatique et sans perte de débit de l’écoulement entraîne les relations suivantes valables en gaz
réels et en gaz parfaits :
. P20 P2 MM (16)
. T20 T2 (17)
. Da 20 Da 2 (18)
. D 20 D 2 (19)
. 20 2 (20)
Le seul paramètre nécessaire au calcul de ce module "manche d’entrée d’air moteur" est la perte de
charge (1 - ). Le calcul de cette perte de charge est détaillé dans le chapitre 6. Il s'agit d'un
choix de conception. Les manches d’entrée d’air moteur étant généralement très courtes, cette perte
de charge sera la plupart du temps négligée. Notons que cette manche d’entrée d’air moteur peut
être complétée d’un système d’anti-givrage à base d’un prélèvement d’air chaud, ce qui imposerait
de compléter la description précédente par un module de mélange de flux décrit ultérieurement dans
ce paragraphe.
Compresseur - Plans 20 à 22/12 (COBP) et 22 à 3 (COHP)
Dans le cas d’un turboréacteur double corps double flux, le calcul du module "compresseur" est
mené une première fois pour le module compresseur basse pression (COBP) entre les plans 20 et
22/12 et une deuxième fois pour le module compresseur haute pression (COHP) entre les plans 22
et 3. Chacune des compressions correspond à une évolution adiabatique, sans perte de débit et avec
apport de travail par la turbine. Comme décrit dans le cours de Thermodynamique, il est possible de
décrire une compression réelle par deux types de rendement (isentropique et polytropique), ce qui
correspond à deux types de calculs différents pour ce qui concerne la température de sortie.
En notant f le plan de sortie et i le plan d'entrée du compresseur considéré, et c les caractéristiques
moyennes du compresseur, on aura les équations suivantes valables en gaz réels et en gaz parfaits :
. Pf Pi C (21)
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 20 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
. Da f Da i Da C (22)
. D f Di D C (23)
. f i C (24)
Nota : ce module de compression ne s’applique qu’à un débit constant entre l’entrée et la sortie
donc sans apport ni perte. Dans le cas de prélèvements d’air internes au compresseur, celui-ci sera
décomposé en autant de sous-modules compresseur à débit constant que nécessaire.
Dans le cas des gaz parfaits, l’annexe A.2 précise les hypothèses et approximations qui permettent
d’écrire les équations (25) à (28) et (30), considérant la valeur moyenne de la fonction Cp sur le
compresseur (CpC) et celle résultante de C.
en gaz parfaits en gaz réels
T Tf
. Cp C Cp i , C (25)
2
Cp C
. C (26)
Cp C R
pour un rendement polytropique :
C 1
Cpoly C
log10 C
Tf
. Tf , C Ti , C
. C (27) (27r)
Ti Cpoly
pour un rendement isentropique :
c 1
Tf 1 c
. 1 C 1 (28) . Tfis , C Ti , C log10 C (28r)
Ti Cis
HTfis , C HTi , C
. HTf , C HTi , C (29r)
Cis
. WC D C Cp C (Tf Ti ) (30) . WC D C HTf , C HTi , C (30r)
Deux paramètres sont nécessaires pour réaliser le calcul du module.
Le taux de compression C est typiquement un choix de conception, comme nous le verrons dans
l'analyse des résultats obtenus. Il n'est certes pas complètement libre, mais la plage de choix reste
assez importante : il convient toutefois de garder en mémoire pour son choix, les contraintes
thermiques et mécaniques qu'il pourrait entraîner, notamment dans le cas d'avions devant aller à de
forts Mach de vol à basse altitude. Dans la pratique, ce taux de compression ne saurait pour cette
raison dépasser 50 pour les années 2000-2010. Notons que lorsque le diamètre extérieur du
compresseur BP devient important, ce module peut parfois être modélisé en deux sous-modules
pour lesquels les rendements diffèrent entre flux primaire (plans 20P à 22) et flux secondaire (plans
20S à 12).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 21 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Le rendement, qu'il soit isentropique ou polytropique, est une limitation technologique : on
essaiera toujours de prendre le meilleur rendement disponible sur la base par exemple de projection
de l'existant. Le calcul de ces rendements est détaillé dans le chapitre 10. La limite actuellement
admise pour les rendements isentropiques est dans la plage 0,85 pour les machines industrielles à
0,90 pour les compresseurs de dernière génération (0,87 à 0,92 s'il s'agit d'un rendement
polytropique). Le rendement choisi pour le cycle sera un objectif à atteindre lors du
dimensionnement du compresseur : il faut donc être prudent pour éviter des itérations inutiles.
Enfin, les équations (30) et (30r) permettent de calculer en gaz parfaits et en gaz réels la puissance
nécessaire pour entraîner le compresseur considéré.
Séparation des flux - Plans 22 et 12
Dans le cas d’un moteur double flux où la séparation des flux se produit en aval du compresseur
BP, l’évolution isentropique et adiabatique de l’écoulement d’air sans perte de débit se traduit par le
paramètre "taux de dilution" , représentatif de la répartition du débit d’air global entre les deux
plans 22 et 12, valable en gaz réels et en gaz parfaits :
Da 12
. (31)
Da 22
. Da 12 Da 20 (32)
1
1
. Da 22 Da 20 (33)
1
Le seul paramètre nécessaire au calcul est le taux de dilution : il s'agit d'un choix de conception
de même nature que le taux de compression. La plage de variation de ce paramètre va de 0 à un
maximum de l’ordre de 20 pour les moteurs civils à très forts taux de dilution, l'optimum, comme
nous le verrons ci-dessous, étant aux alentours de 6 à 10. Pour les moteurs militaires, il ne dépasse
que rarement 1,5 et son optimum se situe plutôt dans la plage 0,3 à 0,5 selon l’encombrement
spécifié par l’avionneur, en général le diamètre maximum du moteur, pour des raisons d’installation
dans la cellule.
Prélèvements d'air - Plans 3 à 31
Les prélèvements d’air peuvent être de deux natures :
- est une fourniture d’air au motoriste pour le refroidissement des aubes de turbine et
le dégivrage. Cet air est donc "recyclé" dans le moteur,
- est une fourniture d’air à l’avionneur pour le refroidissement et/ou le réchauffement
de matériels électroniques, la pressurisation de l’air en cabine, etc. Cet air est donc perdu
la plupart du temps pour le moteur.
Selon cette nature et donc les niveaux de débit et de température recherchés, le prélèvement sera
réalisé soit en sortie du compresseur (plans 3 à 31), soit à l’intérieur du compresseur (prélèvement
inter étages). L’exemple traité ici est le cas de prélèvements d'air réalisés en sortie du compresseur
HP, entre les plans 3 et 31.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 22 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Il existe également des prélèvements d’air sur le compresseur pour le décharger si nécessaire et
éviter des phénomènes de pompage.
Comme pour le module "séparation des flux", le module "prélèvement d’air" se traduit par une
évolution isentropique et adiabatique avec perte de débit, d'où les équations suivantes valables en
gaz réels et en gaz parfaits :
. P31 P3 (34)
. T31 T3 (35)
. x (36)
. Da 31 1 Da 3 (37)
. D 31 1 D 3 (38)
. 31 3 (39)
Deux paramètres sont nécessaires au calcul de ce module.
Le paramètre représente la proportion du débit d’air en sortie compresseur prélevé pour le
besoin avion : il s'agit donc clairement d'une contrainte avionneur. Une marge complémentaire est
en général prise par rapport au besoin exprimé par l’avionneur de manière à couvrir une évolution
possible du besoin avion.
Le paramètre représente la somme des proportions de débit d’air x prélevées en sortie
compresseur pour refroidir les turbines HP et BP (distributeur et roue mobile). Les paramètres
x sont typiquement des choix de conception liés aux objectifs de durée de vie des parties chaudes
ainsi qu’à la technologie et aux matériaux utilisés pour les turbines. En pratique, ces prélèvements
d’air ne dépassent pas quelques pour-cent (rarement plus de 10 % au total).
Bien que nous n'ayons pas choisi de l'introduire dans l'architecture choisie, il convient de noter
qu'un autre type de prélèvement d’air peut être réalisé pour contrer les effets du givre dans les
entrées d'air et les premiers étages du compresseur BP. L'air est souvent réintroduit dans le plan
amont du compresseur BP (roue directrice d’entrée), ce qui nécessite des calculs itératifs assez
complexes pour calculer le débit passant réellement dans le compresseur. Là encore, il s'agit d'un
choix de conception et la valeur de ces prélèvements ne dépasse pas quelques pour-cent (rarement
au delà de 5 %).
Chambre de combustion - Plans 31 à 4
La chambre de combustion se situe classiquement entre les plans 31 et 4. Le phénomène physique
décrit est un mélange air/carburant qui engendre un apport de chaleur par combustion du débit de
carburant injecté. Il n’y a pas d’apport de travail, d'où les équations suivantes valables en gaz réels
et en gaz parfaits :
. P4 P31 CC (38)
. Da 4 Da 31 (39)
. D 4 Da 4 1 4 (40)
. Dc 4 Da 4 4 = DcCC (41)
Le mélange de l’air et du carburant est traité globalement dans la démarche. Le système considère
en entrée l’air en sortie compresseur et le carburant injecté et en sortie les gaz en sortie chambre. On
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 23 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
assure bien la conservation du débit et on peut appliquer le premier principe de la
thermodynamique :
. D 4 H(T4 , 4 ) D 31 H(T31 , 31 ) Dc 4 H CARB (TCARB ) Q (42)
La quantité de chaleur étant proportionnelle au débit de carburant injecté, nous avons :
. D 4 H(T4 , 4 ) D 31 H(T31 , 31 ) Dc 4 PCI CARB H CARB (TCARB ) (43)
En pratique, la température du carburant injecté étant faible, le terme est négligé en regard du
pouvoir calorifique (PCI) du carburant (moins de 1 %), soit l’équation suivante qui permet
d’introduire le rendement de combustion de la chambre :
. D 4 H(T4 , 4 ) D 31 H(T31 , 31 ) Dc 4 CC PCI CARB (44)
Dans le cas des gaz parfaits, les équations (45) et (47) prennent en compte la valeur moyenne de la
fonction Cp sur la chambre de combustion CpCC.
en gaz parfaits en gaz réels
T T4
. Cp CC Cp 31 ,4 (45)
2
Cp CC T4 T31 HT31, 31 H AIR T4
. 4 (46) . 4 (46r)
PCI CC Cp CC T4 H CARB T4 PCI CC
Cp CC (D 4 T4 D 31 T31 ) D 4 HT4 , 4 D 31 HT31 , 31
. CC (47) . CC (47r)
PCI Dc CC PCI Dc CC
Quatre paramètres sont nécessaires à la réalisation du calcul de ce module.
Le paramètre PCI représente le pouvoir calorifique inférieur du carburant : c'est une limitation
technologique liée à la nature du carburant. Il convient toutefois de noter que le carburant est lui une
contrainte de l'avionneur. La valeur des principaux PCI est donnée dans le chapitre 8. Pour
information, le PCI le plus classiquement utilisé est celui du kérosène (TR0 ou JP-8) qui est égal à
43 154 kJ/kg.
Les paramètres CC et CC représentent respectivement la perte de charge (1 - CC) de la chambre
de combustion (pertes aérodynamique et thermique confondues) et le rendement de la chambre tel
que décrit au paragraphe 2 ci-dessus. Ce sont tous deux des limitations technologiques liées à la
géométrie de la chambre, aux matériaux utilisés et à la technologie des injecteurs. En
fonctionnement, ces deux paramètres varient avec les conditions en amont de la chambre (pression,
température, débit et viciation) comme nous le verrons dans le chapitre 8 consacré au
dimensionnement des chambres de combustion. Dans la pratique, nous prendrons un rendement et
une perte de charge "moyens" représentatifs des conditions de fonctionnement les plus courantes de
la chambre. Le rendement est très proche de 1 (compris entre 0,99 et 1) au plein gaz et la perte de
charge dépasse rarement les 6 % (plage de variation entre 3 et 6 %).
Le dernier paramètre à prendre en compte est la température de sortie chambre T4 qui tient à la
fois d'une contrainte avionneur, d'une limitation technologique et d'un choix de conception lorsque
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 24 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
l'on respecte les deux limites précédemment énoncées. En effet, à un carburant donné injecté dans
des conditions de pression et de température données, est associé une température maximale de
combustion appelée température stœchiométrique. Cette température dépendant de la nature du
carburant est donc bien une contrainte avionneur. La tenue des matériaux de la chambre et surtout
du distributeur de turbine HP nécessite en pratique des températures de sortie bien inférieures à la
limite stœchiométrique, même en utilisant des technologies de refroidissement sophistiquées. A
l'heure actuelle, on n’arrive guère à dépasser les 2000-2100 K sur des chambres expérimentales. Il
reste donc une plage de variation assez grande, grosso modo entre 1200 et 1950 K, dans laquelle il
est possible de faire évoluer la température de sortie chambre qui est fixée dans les limites prescrites
par le motoriste. Il est évident que le choix de cette température doit prendre en compte une marge
de croissance potentielle à risque minimum. Le besoin en puissance maximale d'urgence des
hélicoptères sera obtenu par le dépassement de la limite technologique, ce qui bien évidemment se
traduit obligatoirement par des dégâts importants sur la chambre et les turbines, d'où l'acceptation
de contrôle, voire de dépose moteur à l'issue de leur utilisation dans de telles conditions.
La température T4 choisie est la température moyenne de sortie chambre (température barycentrée
par le débit local) : elle intègre donc les facteurs d’hétérogénéités de sortie chambre que nous
développerons dans le chapitre 8.
Nous verrons au chapitre suivant que T4 est aussi un paramètre de pilotage au travers de l’action du
pilote sur la manette des gaz et donc le débit de carburant injecté dans la turbomachine.
Turbines HP et BP - Plans 4 à 49 : considérations générales
La turbine est un module complexe dans lequel les différents débits d’air de refroidissement
réinjectés dans la veine (film cooling intrados et extrados et évacuation) compliquent l’analyse.
Si l’on raisonne globalement, sur une turbine fournissant la puissance WT à partir d’un débit
d’entrée D4 à la température T4 et d’une réintroduction d’air de débit ( . D3) à la température T3, on
a l’équation suivante :
WT D5 H(T5 , 5 ) D 4 H(T4 , 4 ) D3 H(T3 , 3 )
état final état initial
et : is
D5 H(T5 , 5 ) D 4 H(T4 , 4 ) D3 H(T3 , 3 )
D5 H(T5is , 5 ) D 4 H(T4 , 4 ) D3 H(T3 , 3 )
Tout se passe comme si en application du premier principe, une turbine refroidie était composée
d’un mélangeur suivi d’une détente à iso-débit. Cette facilité masque néanmoins une vraie difficulté
sur l’évolution de la pression. Par contre, la notion de rendement polytropique devient assez vite
inapplicable, voire fausse : il faut en effet décrire plus précisément le chemin parcouru, si à ce stade
c’est possible.
Pour ce faire, nous allons devoir détailler le fonctionnement d’une turbine.
Les turbines HP et BP sont composées de deux modules chacune : un distributeur (plans 4 à 41 et
48 à 49) et un rotor (plans 41 à 48 et 49 à 50), tous deux pouvant bénéficier ou non d’un
refroidissement par de l’air prélevé en sortie du compresseur HP (par exemple, pour le
distributeur de turbine HP, pour le rotor de turbine HP, pour le distributeur de turbine BP et
pour le rotor de turbine BP).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 25 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Plan
3
Plan
Vitesse extrados 2
ment Evacuation
s e
ro idis gaz refroidissement
R ef
Film cooling Vitesse intrados
extrados
Film cooling
Vitesse intrados
incidente
Plan
1
Figure 6 : modélisation des aubages refroidis
Comme le montre la figure 6, les aubes qui constituent ces modules sont assimilables à des profils
aérodynamiques qui bénéficient ou non de refroidissements internes dont les sorties d’air peuvent
être localisées le long de l’aubage ("film cooling" intrados et extrados : refroidissement par films
d’air) et/ou en sortie d’aubage, la proportion d’air étant de l’ordre de 10 à 20 % en films d’air et de
80 à 90 % au bord de fuite de l’aubage. Compte tenu de cette répartition, l’influence des films d’air
sur le cycle thermodynamique peut être négligée. En effet, ils conduisent plutôt à renforcer la
couche limite et n’interviennent que peu dans les échanges de puissance (puissance des forces
aérodynamiques).
Par contre, l’air de refroidissement qui s’évacue au bord de fuite de l’aubage va se mélanger dans le
sillage de l’aubage avec le flux d’air extérieur et, de par son plus grand débit, modifier le cycle.
Sur le plan thermodynamique, chaque module, distributeur et rotor, doit donc être décomposé en
deux sous-modules de calcul : un module d’échange de travail ou de chaleur à débit constant le long
de l’aubage et un module de mélange de flux au bord de fuite de l’aubage.
Ce modèle est parfaitement cohérent du chemin thermodynamique considéré et respecte les deux
principes de la thermodynamique. Notons toutefois que parler de refroidissement suppose qu’il y a
échange de chaleur avec les flux en circulation.
Soit Qf la quantité de chaleur prélevée dans le flux extérieur par les refroidissements et Qf’ la
quantité de chaleur absorbée par les refroidissements d’air. Dans le module d’échange de chaleur, si
T31’ est la température de l’air de refroidissement en sortie d’aubage, on devrait donc avoir en
prenant les notations des plans de la figure 6 :
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 26 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
- sur le flux extérieur : D1 H(T2 , 2 ) H(T1 , 1 ) W Qf (48)
- sur le flux de refroidissement : Dp H(T31' , 31 ) H(T31 , 31 ) Qf ' (49)
avec : Dp = X . D1
Or Qf ~ -Qf’ en supposant que les pertes de chaleur par le disque sont négligeables, hypothèse
certes simplificatrice mais valable au premier ordre. On en déduit dans le plan 3 de la figure 6 :
. D 3 H(T3 , 3 ) D1 H(T2 , 2 ) Dp H(T31' , 31 )
W Qf D1 H(T1 , 1 ) Qf 'Dp H(T31 , 31 )
W D1 H(T1 , 1 ) Dp H(T31 , 31 )
ce qui revient à écrire : D 3 H(T3 , 3 ) D1 H(T2' , 2 ) Dp H(T31 , 31 ) (50)
avec : D1 H(T2' , 2 ) W D1 H(T1 , 1 ) (51)
Ceci démontre que l’on peut, au titre du premier principe, ignorer l’échange de chaleur : bien
évidemment, ceci n’est plus possible au titre du second principe puisque tout échange de chaleur
induit une perte de charge, négligée a priori ici.
Par un raisonnement identique, on peut démontrer que le fait de placer l’ensemble des arrivées d’air
de refroidissement dans le plan 3 ne change rien au niveau de température en sortie de turbine, mais
que par contre, le niveau de pression ne peut être restitué que si l’on ajuste le rendement au chemin
retenu.
Nota : ce raisonnement est bien évidemment valable pour le système d’anti-givrage de la roue
directrice d’entrée.
Distributeur de turbine - Plans 4 à 41 (TUHP) et 48 à 49 (TUBP)
Dans le cas d’un turboréacteur double corps double flux, le calcul du module "distributeur de
turbine" est mené une première fois pour le module turbine haute pression (TUHP) entre les plans 4
et 41 et une deuxième fois pour le module turbine basse pression (TUBP) entre les plans 48 et 49.
Ce module, dont l’objectif est d’orienter l’écoulement en amont du rotor de turbine, se caractérise
par l’apport d’un débit de refroidissement nécessaire à la tenue thermique de ce module. On
considérera un mélange adiabatique à iso section de deux gaz.
Le module d’échange de travail est ici inutile puisque les forces aérodynamiques ne travaillant pas
(déplacement nul des aubes).
Remarque : dans le chapitre n° 4 relatif aux calculs en fonctionnement hors adaptation, nous
verrons que dans le plan 40, là où la section de la veine A40 est minimale (correspond au plan dans
lequel les profils d’aubes du distributeur de turbine ont une épaisseur maximale), le Mach M40 est
sonique tant que le distributeur de turbine est amorcé. Dans ce cas, les paramètres tels que
température et pression statiques Ts40 et Ps40, vitesse V40 et section A40 peuvent être déterminés
dans ce plan 40 connaissant le Mach M40 = 1.
En notant f le plan de sortie et i le plan d'entrée du distributeur de turbine considéré, les équations
du processus de mélange des deux flux, valables en gaz réels et en gaz parfaits, sont les suivantes
avec X = pour le distributeur de turbine HP et X = pour le distributeur de turbine BP :
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 27 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
. Pf Pi mél (52)
. Da f Da i X Da 3 (53)
. D f D i X D 3 (54)
Dc CC
. f (55)
Da i X Da 3
Pour le calcul de la température de mélange Tf, nous aurons :
D i CpTi , i Ti X D 3 CpT3 , 3 T3
. en gaz parfaits : Tf (56)
(D i X D 3 ) CpTf , f
D i HTi , i X D 3 HT3 , 3
. en gaz réels : HTf , f (56r)
Di X D3
Un seul paramètre est donc nécessaire à la réalisation du calcul de ce module.
L’efficacité du mélange mél est composée de deux termes, l'un qui résulte du calcul de mélange et
l'autre qui est représentatif de la perte de charge associée au mélange. Dans la pratique, la
connaissance des pertes de charge dans les amenées de l'air de refroidissement n'est pas facile à
acquérir, ce qui fait qu'en pratique, on se contentera d'un simple objectif de perte de charge compris
entre 0,9 et 1. mél sera donc considéré comme un choix de conception.
Rotor de turbine - Plans 41 à 48 (TUHP) et 49 à 50 (TUBP)
Dans le cas d’un turboréacteur double corps double flux, le calcul du module "rotor de turbine" est
mené une première fois pour le module turbine haute pression (TUHP) entre les plans 41 et 48 et
une deuxième fois pour le module turbine basse pression (TUBP) entre les plans 49 et 50.
Chacune des détentes correspond dans un premier temps à une évolution adiabatique avec
fourniture de travail par la turbine sans variation de débit et dans un deuxième temps à un
mélange au bord de fuite de l’aubage si celui-ci est ventilé (2 pour le rotor de turbine HP et 4
pour le rotor de turbine BP). Comme décrit dans le cours de Thermodynamique, il est possible de
décrire une détente réelle par deux types de rendement (isentropique et polytropique), ce qui
correspond à deux types de calculs différents pour ce qui concerne la pression de sortie.
Les équations de la détente résultent de l'équilibre compresseur - turbine, la puissance fournie par la
turbine étant partagée entre les pertes d'énergie sur arbre (frottement des paliers), les prélèvements
de puissance sur arbre (exprimés en pourcentage de la puissance totale disponible) et la puissance
consommée par le compresseur.
En notant f le plan de sortie et i le plan d'entrée de la turbine considérée, on aura les équations
suivantes valables en gaz réels et en gaz parfaits :
. Da f Da i Da T (57)
. D f Di D T (58)
. f i T (59)
. TP WT WC WPP 0 (60)
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 28 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Dans le cas des gaz parfaits, les approximations qui permettent d’écrire les équations (61) à (64)
considèrent la valeur moyenne de la fonction Cp sur le rotor de turbine CpT.
en gaz parfaits en gaz réels
T Tf
. Cp T Cp i , T (61)
2
Cp T
. T (62)
Cp T R
. WT D T Cp T Tf Ti (63) . WT D T HTf , T HTi , T (63r)
d’où :
WT WT
. Tf Ti (64) . HTf , T HTi , T (64r)
D T Cp T DT
pour un rendement polytropique :
T Tf , T Ti , T
P T Pf Tpoly
. T f f Tpoly ( T 1) (65) . T 10
(65r)
Pi Ti Pi
pour un rendement isentropique :
HTf , T HTi , T
. HTf is , T HTi , T (66r)
Tis
T
T
1 T 1
. T f 10 Tf is , T Ti , T
P
. T 1 f 1 (67) (67r)
Ti Tis Pi
Trois paramètres sont nécessaires pour réaliser le calcul.
Comme pour le compresseur, le rendement de la turbine T, qu'il soit isentropique ou
polytropique, est une limitation technologique. On essaiera toujours de prendre le meilleur
rendement disponible sur la base par exemple de projection de l'existant. La limite actuellement
admise pour le rendement isentropique est dans la plage 0,87 pour les machines industrielles à 0,91
pour les turbines de dernière génération (0,85 à 0,90 pour les rendements polytropiques).
Le rendement de transmission de puissance TP, est également une limitation technologique
résultant des frottements sur les paliers. Sa valeur courante est de l'ordre de 0,95 à 1.
Enfin, WPP est la puissance mécanique nécessaire d’une part au fonctionnement du moteur
(entraînement des pompes à carburant, pompe à huile, …) et à l’alimentation électrique de l’avion.
Il s’agit donc à la fois d’une contrainte avionneur, souvent majoritaire, et d’un choix de conception.
L’optimisation de l’énergie à bord d’un avion amène aujourd’hui à s’interroger sur le partage entre
un prélèvement permanent sur la motorisation et le fonctionnement d’un groupe auxiliaire de
puissance.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 29 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Comme il s'agit de déterminer les performances globales des turbines, nous pouvons utiliser deux
chemins différents pour appliquer le premier principe : le découpage proposé est plus facile à traiter
que le chemin réel qui nécessite une connaissance plus approfondie de l'architecture de la turbine. Il
conviendra simplement de se rappeler que les rendements utilisés sont des rendements globaux qui
pourront être assez différents des rendements objectifs à atteindre lors du dimensionnement de la
turbine.
Mélange de deux flux - Plans 56, 16 et 6
Le processus est un mélange adiabatique à section constante. Le calcul de mélange de flux
concerne à la fois les calculs de réintroduction d’air de refroidissement au bord de fuite des aubages
traités ci-dessus et la confluence des flux entre les plans 16 et 56 en amont et le plan 6 à l'aval. Ce
dernier cas diffère cependant du précédent par certains aspects liés au calcul de la pression de
mélange.
La confluence est une zone de dimensionnement géométrique du moteur puisqu’il faut
impérativement que la condition de Kutta-Jukovski soit respectée, à savoir l’égalité des pressions
statiques de part et d’autre de la tôle de confluence :
. Ps 56 Ps16 (68)
Les équations du processus de mélange à la confluence des deux flux, valables en gaz réels et en
gaz parfaits, sont les suivantes :
. Da 6 Da 56 Da 16 (69)
. D 6 D 56 D16 (70)
. A 6 A 56 A16 (71)
Dc CC
. 6 (72)
Da 6
Pour le calcul de la température de mélange T6, nous aurons :
D 56 CpT56 , 56 T56 D16 CpT16 , 16 T16
. en gaz parfaits : T6 (73)
D 6 CpT6 , 6
D 56 HT56 , 56 D16 HT16 , 16
. en gaz réels : HT6 , 6 (73r)
D6
Le calcul de la pression totale de mélange P6 est réalisé à partir du principe de conservation de la
Dynalpie :
. Dyn 6 Dyn16 Dyn 56 avec : Dyn Ps A (1 M 2 ) (D V) (Ps A) (74)
Trois paramètres sont donc nécessaires pour réaliser le calcul : la section A16 (ou le Mach M16), la
section A56 (ou le Mach M56) et l’efficacité du mélange MEL. Les deux premiers paramètres sont
très clairement des choix de conception du motoriste : ils sont toutefois contraints en limite
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 30 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
supérieure par la somme de ces deux sections, soit A6, soumise à la contrainte de maître couple
avionneur.
L’efficacité du mélange MEL est quant à elle une limitation technologique résultant de la
technologie retenue pour le mélangeur (simple tôle de confluence ou mélangeur à lobes par
exemple).
D'autres paramètres participent indirectement au calcul de mélange : il s'agit du taux de
compression BP et du taux de dilution. En effet, une fois le Mach ou la section donnée sur l’un des
flux, la condition de Kutta-Jukovski réduit le choix possible sur les conditions de fonctionnement et
le dimensionnement de l’autre flux. Seule une modification du taux de compression BP et/ou du
taux de dilution est alors à même d’offrir une solution viable.
Pour information, un calcul détaillé de mélange est présenté en annexe 1 du cours de
Thermodynamique.
Rechauffe - Plans 6 à 7
La rechauffe se situe classiquement entre les plans 6 et 7. Le phénomène physique décrit est un
mélange air/carburant qui engendre un apport de chaleur par combustion du débit de carburant
injecté. Il n’y a pas d’apport de travail, d'où les équations valables en gaz réels et en gaz parfaits :
. P7 P6 RE (75)
. Da 7 Da 6 (76)
. D 7 Da 7 1 7 Da 7 1 6 RE (77)
Dans le cas des gaz parfaits, les approximations qui permettent d’écrire les équations (78) à (80)
considèrent la valeur moyenne de la fonction Cp sur la rechauffe CpRE.
en gaz parfaits en gaz réels
T T6
. Cp RE Cp 7 , RE (78)
2
Cp RE (D 7 T7 D 6 T6 ) D 7 HT7 , 7 D 6 HT6 , 6
. RE (79) . RE (79r)
PCI Dc RE PCI Dc RE
avec :
Cp RE T7 T6
. en gaz parfaits : . 7 6 1 6 (80)
PCI RE Cp RE T7
H AIR T7 (1 6 ) HT6 , 6 PCI RE 6
. en gaz réels : . 7 (80r)
PCI RE H CARB T7
Comme pour la chambre de combustion, quatre paramètres sont nécessaires à la réalisation du
calcul de ce module.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 31 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Le paramètre PCI représente le même pouvoir calorifique inférieur du carburant : c'est une
limitation technologique liée à la nature du carburant. Il ne peut varier entre la chambre de
combustion et la rechauffe.
Les paramètres RE et RE représentent respectivement la perte de charge (1 - RE) du système de
rechauffe (pertes aérodynamique et thermique confondues) et le rendement de combustion RE tel
que décrit au paragraphe 2 ci-dessus. Ce sont tous deux des limitations technologiques liées à la
géométrie du système de rechauffe, aux matériaux utilisés et à la technologie des injecteurs. En
fonctionnement, ces deux paramètres varient avec les conditions amont (pression, température,
débit et viciation) comme nous le verrons dans le cours n° 9 réservé au dimensionnement des
systèmes de rechauffe. Dans la pratique, nous prendrons un rendement et une perte de charge
"moyens" représentatifs des conditions de fonctionnement les plus courantes du système de
rechauffe. Pour information, la perte de charge dépasse rarement les 6 % (plage de variation entre 4
et 6 %). A noter qu’à même richesse injectée, le rendement de combustion du système de rechauffe
sera toujours inférieur à celui d’une chambre de combustion compte tenu de la viciation de l'air
(rendement compris entre 0,8 et 0,9 au plein gaz PC).
Le dernier paramètre à prendre en compte est la température de sortie rechauffe T7 qui tient à la
fois d'une contrainte avionneur (nature du carburant), d'une limitation technologique (tenue
thermique du canal de rechauffe) et d'un choix de conception lorsque l'on respecte les deux limites
précédemment énoncées. Cette limite est théoriquement supérieure à celle des chambres de
combustion bien que la viciation de l'air amène une dégradation de la température stœchiométrique.
La tenue des matériaux du canal de rechauffe et surtout l'absence d'obstacle dans le flux en sortie
tuyère permettent de dépasser les 2050-2100 K. La plage de variation de la température de sortie de
rechauffe (entre 1200 et 2100 K grosso modo) est donc assez grande. Il est cependant évident que le
choix de cette température devra prendre en compte une marge de croissance potentielle à risque
minimum. Comme la température T4, la température T7 est une température moyenne.
Tuyère - Plans 7 à 9
La tuyère se situe classiquement entre les plans 7 et 8 pour une tuyère simplement convergente ou
simplement divergente et entre les plans 7 et 9 pour une tuyère convergente-divergente.
Le phénomène physique décrit est une détente adiabatique sans échange de travail ni
modification du débit.
Le calcul se fait en une seule étape pour les tuyères simplement convergentes ou divergentes (calcul
du plan 8) et en deux étapes pour les tuyères convergente-divergentes (calcul des plans 8 et 9).
Pour le plan 8, les calculs donnent les résultats suivants valables en gaz réels et en gaz parfaits :
. P8 P7 TU ( 7 8) (81)
. Da 8 Da 7 (82)
. D8 D 7 (83)
. T8 T7 (84)
. 8 7 (85)
Pour le plan 9, dans le cas d’une tuyère convergente-divergente, on aura de même :
. P9 P8 TU (89 ) (86)
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 32 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
. Da 9 Da 8 (87)
. D9 D8 (88)
. T9 T8 (89)
. 9 8 (90)
Les paramètres TU(78) et TU(89) représentent les pertes de charge (1 - TU) dues aux frottements
le long des volets de tuyère respectivement entre les plans 7 et 8 et les plans 8 et 9. Ces pertes de
charge sont calculées à partir des équations de l’annexe 11 du Mémento, connaissant les
caractéristiques des volets (longueur, rugosité, …) et celles de l’écoulement (vitesse, pression, …).
L’ordre de grandeur de ces pertes de charge est de 0,5 à 1 % entre les plans 7 et 8 pour une tuyère
convergente et de moins de 0,5 % pour une tuyère simplement divergente. Entre les plans 8 et 9,
lorsque la tuyère est amorcée, i.e. M8 = 1, la perte de charge peut varier très rapidement, le Mach en
bout de volets divergents M9 étant supersonique.
Pour poursuivre la caractérisation du plan 8, il est ensuite indispensable de déterminer le cas de
fonctionnement de la tuyère, à savoir si elle est "critique" ou "adaptée" tel que résumé dans le
tableau en figure 7.
ADAPTEE CRITIQUE
7 8
TUYERE M7 < M8 < 1 M8 = 1
CONVERGENTE Ps8 = Ps0 (*) Ps8 > Ps0
7 8 9
M7 < M8 < 1 M8 = 1
TUYERE
Ps8 > Ps0
CONVERGENTE
M9 < M8 < 1 M9 > 1
DIVERGENTE
Ps9 = Ps0 (*) Ps9 = Ps0 (*)
7 8
TUYERE M8 < M7 < 1
-
DIVERGENTE Ps8 = Ps0 (*)
(*) : l’égalité peut ne pas être toujours respectée
(jet sur-détendu ou sous-détendu)
Figure 7 : cas de fonctionnement des tuyères
Pour cela, il suffit de comparer Ps8 à Ps0 et, en première approximation, Ps8 peut être calculée en
gaz parfaits, le calcul en gaz réel étant réalisé au besoin dans un deuxième temps :
en gaz parfaits en gaz réels
8
1 1 P8
. Ps 8 P8 1 8 M8 2 8 (91) . Ps 8 (91r)
2 10 (T8 , 8 ) (Ts 8 , 8 )
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 33 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
en gaz parfaits (suite) en gaz réels (suite)
1
1
2
M R Ts 8
. Ts 8 T8 1 8 M82 (92) . H(Ts 8 , 8 ) H(T8 , 8 ) 8 8 (92r)
2 2
avec : V8 M 8 8 R Ts 8 où, pour mémoire : 8 f (Ts 8 , 8 ) (93)
Nota : lorsque M8 = 1 et 8 = 1,3 (cas courant), l’équation (91) donne une pression totale P8 égale
à environ 1,83 fois la pression statique Ps8. Donc, lorsque P8 devient supérieure à 1,83 fois la
pression statique atmosphérique Ps0, la tuyère est nécessairement "critique" dans le plan 8. Par
contre, si M8 < 1, alors il y a égalité des pressions statiques (Ps8 = Ps0) et le Mach M8 se déduit
rapidement de l’équation (91).
En résumé, les différents cas de fonctionnement possibles sont les suivants :
- si Ps8 > Ps0, alors M8 = 1, la tuyère est dite "critique" ou "amorcée" dans le plan 8 et si la
tuyère est convergente-divergente, la section A9 sera dimensionnée de telle sorte qu’il y
ait égalité des pressions statiques : Ps9 = Ps0 (M9 > 1), qui est la configuration optimale
comme nous le verrons dans le chapitre 7 relatif au dimensionnement des tuyères. Pour
information, si Ps9 > Ps0 le fonctionnement est dit "sous-détendu" et si Ps9 < Ps0 le
fonctionnement est dit "sur-détendu",
- si Ps8 Ps0, alors M8 < 1, la tuyère est dite "adaptée" dans le plan 8 et plusieurs cas de
figure se présentent :
. si la tuyère est simplement divergente, nous aurons Ps8 = Ps0 et M8 < M7,
. si la tuyère est simplement convergente, nous aurons Ps8 = Ps0 et M8 > M7,
. si la tuyère est convergente-divergente, nous aurons a priori Ps9 = Ps0 et M9 < M8.
Notons que la pression statique Ps8 ne peut varier qu’entre P8 et Ps0 dans le cadre de cette
modélisation monodimensionnelle. En effet, Ps8 < Ps0 signifie dans cette modélisation une
impossibilité de sortir le flux de la tuyère !
Deux (quatre) paramètres sont donc nécessaires pour réaliser le calcul de ce module : le rapport
Ps8/Ps0 (Ps9/Ps0) et la(les) perte(s) de charge TU entre les plans 7 et 8 d'une part et entre les plans
8 et 9 d'autre part. Le rapport de pression Ps8/Ps0 (Ps9/Ps0) est lié au maître couple maximum
tolérable par l'avionneur : c’est donc à la fois une contrainte avionneur et un choix de conception. Il
faudra en effet que ce rapport soit choisi de manière adéquate pour que les sections de sortie et de
col de tuyère soient compatibles de cette exigence. Les pertes de charge sont quant à elles des
limitations technologiques imposées par les frottements sur les parois des volets et les modes de
refroidissement du canal de rechauffe et de la tuyère, si rechauffe il y a.
Pour mémoire, en gaz parfait, les sections sont calculées à partir de l’équation du débit réduit Dr :
D 8 T8
. A8 (94)
P8 Dr8
D 9 T9
. A9 (95)
P9 Dr9
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 34 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
les débits réduits Dr8 et Dr9 étant interpolés dans les tables en fonction de leur Mach et de leur
gamma respectifs.
Pour information, les sections aérodynamiques trouvées par le calcul seront toujours inférieures aux
sections géométriques afin de prendre en compte les couches limites aux parois au travers du
coefficient de débit de la tuyère. Le chapitre 7 réservé au dimensionnement des tuyères détaille ces
différents points.
3.2 Calcul détaillé des performances des turbomoteurs et turbopropulseurs
Contrairement aux turboréacteurs dont les performances sont définies par une poussée, celles des
turbomoteurs et turbopropulseurs sont définies par une puissance disponible sur arbre. La plupart du
temps, l’utilisation de cette puissance par une hélice, une voilure tournante ou un alternateur
nécessite la présence d’un réducteur.
Cette puissance est récupérée soit au travers d’une turbine liée, soit au travers d’une turbine libre,
placée derrière un générateur de gaz (assemblage de 1 à 3 corps et d’une chambre de combustion) :
cette turbine remplace la tuyère convergente d’un turboréacteur. Dans le premier cas, l’arbre de
puissance est lié à l’arbre basse pression compresseur-turbine du générateur de gaz. Dans le second
cas, l’arbre de puissance est complètement indépendant du générateur de gaz.
La tuyère de ce type de turbomachine étant nécessairement divergente avec un écoulement
subsonique, la condition de sortie est Ps8 = Ps0 ce qui impose le taux de détente dans la turbine. A
iso débit, le dimensionnement de la puissance maximale disponible sur l’arbre est donc directement
lié à la section de tuyère A8. La puissance maximale que peut offrir ce type de turbomachine
correspond donc à une détente complète dans la turbine soit un Mach M8 faible ne pouvant être nul
et une section de tuyère A8 importante à défaut de pouvoir être infinie. Une plage de
fonctionnement réaliste est donc définie entre une section de tuyère mini et maxi compatible de
l’encombrement, de la masse, etc. correspondant à un niveau de Mach maxi et mini respectivement
(voir § 4.5).
4 - CALCUL DES PERFORMANCES DES TURBOMACHINES
Il faut maintenant passer des paramètres thermodynamiques de cycle (pression, température, débit,
etc.) aux performances recherchées à savoir la poussée F, la consommation spécifique CS et le
rendement de la turbomachine.
4.1 Poussée F
La poussée F est la résultante des forces de pression exercées par l'air sur les parties solides formant
la turbomachine.
Elle est calculée à partir de l'analyse des forces exercées sur le flux d'air et représente la somme des
forces exercées par le fluide interne additionnée à la somme des forces exercées sur l'extérieur du
moteur (nacelle).
Nous considérerons que la poussée peut se résumer à sa composante axiale. Cette hypothèse peut
être faite dans la mesure où les moteurs à poussée vectorielle sont des moteurs à poussée axiale
dotés d’un dispositif d’orientation.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 35 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
A
E
AT AP
A0 A1 A
9
Figure 7 : tubes de courant
En appliquant aux tubes de courant 1 et 2 le principe de conservation de la dynalpie, on trouve :
.: A Dyn A
0 T
Dyn Dyn 0
A1
(96)
.: A Dyn A
1 P
Dyn Dyn
A9 AE
f dA (97)
avec l’équation de la dynalpie : Dyn Ps (1 M 2 ) A (D V) (Ps A) (98)
En retirant (Ps0 . dA) sur la totalité des surfaces, rien ne change.
La section Ap est extrêmement difficile à définir dans la mesure où il s’agit de toutes les surfaces
mouillées internes. Quant à la section A1, facile à identifier pour les entrées d’air de moteurs civils
subsoniques, elle est indéfinie pour les entrées d’air supersoniques. On préfère donc travailler avec
AE plus facile à identifier et A0 qui constitue la référence lointaine du tube de courant appliqué au
moteur.
La poussée F est la force exercée :
. F
AP
Ps Ps 0 dA A Ps Ps 0 dA 0 (99)
E
En fusionnant les équations (96) et (97) :
. A Ps Ps 0 dA D 9 V9 D 0 V0 Ps 9 Ps 0 A 9 A Ps Ps 0 dA A
P T E
f dA
d’où l’expression de la poussée installée Finstallée en fonction de la poussée non installée :
. Finstallée Fnon installée A T Ps Ps 0 dA A E Ps Ps 0 dA A E f dA (100)
Traînée additive Traînée de pression Traînée
d'entrée d'air de carène de frottement
Le premier terme, la poussée non installée, peut être facilement calculé à partir des paramètres de
cycle : c'est d'ailleurs ce seul terme qui sera systématiquement calculé au niveau moteur. Toutefois,
il ne représente pas la poussée réelle installée qui prend en compte les trois autres termes.
La traînée additive d'entrée d'air est liée au type et à la nature de l'entrée d'air : elle dépend du point
de vol et du débit moteur. Au point de référence, nous verrons que cette traînée peut être annulée.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 36 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Les deux autres termes sont liés à la géométrie de la carène et peuvent s'avérer délicats à calculer :
ce sont typiquement des données d’installation de la responsabilité de l'avionneur. Elles peuvent ne
pas être négligeables, mais il est très difficile à un motoriste de les déterminer a priori.
On calculera donc la poussée non installée F, aussi appelée poussée nette FN, par rapport à la
poussée brute FB :
. F FN D9 V9 D 0 V0 Ps9 Ps 0 A9 FB D0 V0 (101)
. F D8 V8 D0 V0 Ps8 Ps 0 A 8 pour une tuyère convergente (101b)
. F D9 V9 D0 V0 pour une tuyère convergente-divergente (101c)
(optimisée : détente optimale)
4.2 Poussée spécifique FS
Compte tenu des remarques précédentes, nous travaillerons principalement avec la poussée
spécifique non installée FS définie en m/s lorsque la poussée est exprimée en N :
F
. FS (102)
D0
d’où :
D8 V8 D 0 V0 Ps 8 Ps 0 A 8
. FS pour une tuyère convergente (103)
D0
D 9 V9 D 0 V0
. FS pour une tuyère convergente-divergente (104)
D0
D'une manière générale, le calcul de cycle, en considérant en entrée un débit unité permet
d'atteindre directement cette poussée spécifique. Le calcul du débit est alors réalisé en divisant la
poussée objective recherchée par la poussée spécifique. La dernière étape consiste à ne pas oublier
que les contraintes géométriques vont dépendre du débit : en conséquence, une fois le calcul du
débit réalisé, il sera nécessaire de contrôler l'exigence relative au maître couple.
4.3 Consommation spécifique CS
La consommation spécifique CS est définie par le rapport de la consommation horaire Dc à la
poussée F de la turbomachine :
Dc
. CS (105)
F
En règle générale, les constructeurs la définissent en kilogrammes par heure par déca-Newton de
poussée (kg/h/daN). Elle évolue entre 1 kg/h/daN environ pour un moteur monoflux (ATAR) et 0,3
kg/h/daN pour un moteur double flux à fort taux de dilution (GE90).
4.4 Rendements propulsif, thermopropulsif et thermique
Trois types de rendement sont utilisés pour décrire les performances thermodynamiques des
turbomachines : le rendement propulsif P, le rendement thermopropulsif THP, et le rendement
thermique TH.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 37 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Rendement propulsif
Le rendement propulsif P est défini comme le rapport de la puissance de propulsion (puissance
associée au travail de la poussée) sur la puissance fournie à l'air de propulsion. Il mesure l'efficacité
de l'énergie cinétique des gaz à fournir la poussée :
F V0
. P (106)
1
2
D 9 V9' 2 D 0 V0 2
où V9’ est la vitesse pour laquelle Ps9 = Ps0.
Si Ps9 = Ps0, cas par exemple des tuyères convergente-divergentes ou simplement divergentes
lorsque celles-ci sont correctement définies, nous aurons :
2 D 9 V9 D 0 V0 V0 2 V0
. P
D9 V9 D 0 V0
2 2
V9 V0
(107)
Si Ps8 > Ps0, cas par exemple des tuyères convergentes lorsque celles-ci sont critiques, la vitesse V9’
sera une vitesse fictive pour laquelle Ps9’ sera égale à Ps0.
P
Figure 8 : rendement propulsif
La figure 8 donne une idée de la variation de ce rendement pour différents types de turbomachines :
on constate d'emblée l'impact favorable du taux de dilution, qui permet d'avoir des rendements très
élevés pour des Mach de vol subsoniques. Il convient de noter également que les hélices (normales
ou rapides) ont toujours un meilleur rendement que les turboréacteurs.
En fait, le rendement propulsif est d'autant meilleur que la vitesse de sortie des gaz V8 ou V9 est
proche de la vitesse de vol V0, ce qui explique l'amélioration des rendements avec le Mach de vol.
Ainsi, l'Olympus, moteur du Concorde reste aujourd'hui encore, l'un des meilleurs moteurs au
monde avec un rendement propulsif de l'ordre de 0,7 en croisière.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 38 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Rendement thermopropulsif
Le rendement thermopropulsif est le rapport de la puissance de propulsion à la puissance thermique
disponible. Ce rendement mesure l'efficacité de la machine thermique à utiliser la puissance
potentielle du carburant pour la transformer en poussée : il est nécessairement inférieur au
rendement de propulsion, puisqu'il incorpore la notion d'efficacité de transformation de l'énergie du
carburant en énergie apportée au gaz (cette dernière étant mesurée par le rendement thermique de la
machine).
F V0
. THP (108)
Dc PCI
THP
Figure 9 : rendement thermopropulsif
La figure 9 donne une idée de la variation du rendement thermopropulsif pour les différents types
de turboréacteurs : on constate sensiblement les mêmes tendances que pour le rendement propulsif.
Il convient toutefois de noter que les valeurs de ces rendements sont nettement plus faibles.
Rendement thermique
Le rendement thermique est défini par le rapport de la puissance fournie à l'air de propulsion sur la
puissance thermique disponible. On en déduit que :
1
2
THP 2 D9 V9' D 0 V0
2
. TH (109)
P Dc PCI
On peut également regarder le rendement de Carnot du cycle qui sera défini ici comme suit :
Ts 0 Ts
. CARNOT 1 1 0 (110)
Ts 4 T4
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 39 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
4.5 Paramètres liés aux choix de conception
L’objectif est de trouver les paramètres de dimensionnement permettant à l’avion de réaliser sa
mission, notamment par une poussée équilibrant la traînée et par une consommation de carburant en
accord avec le rayon d’action de l’avion et les capacités des réservoirs de l’avion.
La méthode utilisée est basée sur le tracé dans le champs (FS, CS) d’abaques en fonction des
principaux paramètres de dimensionnement du moteur à l’exclusion des paramètres de pilotage du
moteur (section de tuyère, position de la manette des gaz, etc.).
La liste des paramètres de dimensionnement et donc de choix de conception étant longue, un
premier ciblage des principaux paramètres est nécessaire. C’est ce que résume le tableau suivant
dans le cas d’un moteur monocorps, monoflux (influences de +1% découplées les unes des autres) :
t t
Paramètre F/F Class F CS/CS Class CS
(%) (%)
EA 1,51 1 -0,51 6
c -0,09 8 -0,29 9
cc 0,52 4 -0,53 4
TU 0,52 4 -0,52 5
T4 1,18 2 0,74 2
c 0,61 3 -0,32 8
cc 0,02 9 -0,97 1
T 0,52 4 -0,51 6
TP 0,61 3 -0,62 3
Cette analyse montre l’extrême sensibilité de la poussée du moteur aux effets d’installation dans
l’avion (pertes de charge dans l’entrée d’air EA et dans la manche d’entrée d’air MA), ainsi qu’aux
niveaux de la température en entrée turbine T4 et du rendement de transmission de puissance TP.
Quant à la consommation spécifique, il est normal de constater une forte influence du rendement de
la chambre de combustion CC et de la température entrée turbine T4. Notons là aussi une forte
influence du rendement de transmission de puissance TP.
Compte tenu de ces résultats, nous retiendrons les paramètres influents suivants :
- la température de sortie chambre T4 et, éventuellement, de sortie rechauffe T7,
- les taux de compression (BP, HP, ...),
- le taux de dilution dans le cas d’une turbomachine double flux.
Nota : cette évaluation présente l’intérêt complémentaire d’identifier l’impact de la précision des
mesures sur le calcul de la CS. Ces coefficients permettent en outre de "linéariser" le moteur autour
du point de fonctionnement, ce qui permet des calculs plus rapides.
Turbomachine monocorps monoflux avec rechauffe
Dans le cas d’une turbomachine monocorps monoflux avec rechauffe, les paramètres influents sont
limités au taux de compression et à la température de sortie chambre T4 en fonctionnement sec (PG
SEC) si la rechauffe est éteinte et T7PC en fonctionnement au plein gaz avec post-combustion (PG
PC) si la rechauffe est allumée.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 40 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Le moteur ATAR 09K50 développé par Snecma (voir cours d’Introduction) est un exemple de ce
type de turbomachines avec un débit d’entrée d’air Da2 de 73 kg/s, un taux de compression global
C de 6,15 et une température de sortie chambre T4 de 1215 K alors que la température de sortie
rechauffe T7 est de 1930 K.
Plans 2 3 4 6 7 8
Figure 10 : moteur ATAR 09K50
Fonctionnement sec (sans rechauffe)
Les figures 11 à 13 montrent l’influence du taux de compression C (4 à 20) sur la consommation
horaire de carburant Dc exprimée en kilogrammes par seconde (kg/s), la consommation spécifique
CS et la poussée nette FN pour différentes valeurs de T4 (1000 à 1500 K).
Dc [kg/s] Taux de compression = 4 ... 20
T4 = 1000 ... 1500 [K]
2.0 1 50
0
1.8 140
0
1.6
1 30
0
1.4
1 20
0
1.2 110
0
1.0 1 00
0
4
0.8
6
10
0.6
12
14
16
18
20
0.4
2.5 5 7.5 10 12.5 15 17.5 20 22.5
Taux de compression C
Figure 11 : Dc fonction de C et T4
La figure 11 permet de constater que C a une influence favorable sur la consommation horaire
(décroissance de Dc). Cette évolution résulte du fait qu’à iso-T4, la température en amont du
compresseur T0 étant fixée et égale à 288 K en conditions sol ISA, lorsque C augmente, la
température T3 en sortie du compresseur augmente aussi, ce qui signifie que la quantité de carburant
à injecter dans la chambre de combustion est plus faible pour accroître la température de T3 à T4.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 41 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
De même, la figure 12 permet de noter une influence favorable de C sur FN tant que C n’atteint
pas la valeur de C optimal. L’existence de cet optimum pour chaque valeur de T4 s’explique :
- d’une part par le fait que la combustion est d’autant meilleure que C est élevé,
- d’une part par le fait que plus la compression est forte plus la détente l’est aussi ce qui
engendre des pertes de plus en plus élevées, l’équilibre entre compresseur et turbine étant
donné par l’équation (60). Pour une T4 donnée, cela signifie qu’il ne sert donc à rien de
trop comprimer.
La figure 12 permet aussi de vérifier que le taux de compression C de 6,15 retenu pour l’ATAR est
optimum compte tenu de la température de sortie chambre T4 de 1215 K. En effet, pour une T4 de
1215 K, le C optimum est légèrement supérieur à 8. Cependant, par rapport au C de 6,15 retenu
pour l’ATAR, le gain en FN n’est que de 1 kN, soit 100 daN par rapport à une poussée de 4700
daN, soit un gain de 2 % en FN, ce qui est faible en regard de l’effort qu’il aurait été nécessaire de
consentir pour atteindre un C de 8 et non de 6,15 : ajout de deux étages de compression et sans
doute d’un étage de détente, surcroît de masse, d’encombrement, de coût, …
Taux de compression = 4 ... 20
FN [kN] T4 = 1000 ... 1500 [K]
65
al
60 t im
op
C
ite
m
55
15
00 Li
00
50 14
00
13
45
0
1 20
40 1 10
0
10 0 0
6
35
8
4
10
12
30
14
16
25
18
20
20
2.5 5 7.5 10 12.5 15 17.5 20 22.5
Taux de compression
C
Figure 12 : FN fonction de C et T4
La figure 13 montre quant à elle que C a une influence favorable sur la consommation spécifique
(décroissance de CS). Cependant lorsque T4 est faible, on note une augmentation de la CS pour des
C élevés. Ceci résulte du fait qu’à fort C, la température T3 en sortie du compresseur est élevée
alors que T4 est relativement faible : la quantité de carburant à injecter dans la chambre de
combustion (richesse) pour passer de T3 à T4 est donc faible ce qui ne permet pas d’atteindre un
rendement de combustion optimum dans la chambre de combustion comme nous le verrons dans le
chapitre 8.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 42 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Taux de compression = 4 ... 20
CS [g/(kN.s)] T4 = 1000 ... 1500 [K]
36
15
00
34
14
00
13
32
00
12
30 1%
00
11
00
28
10
00
26
4
24
20
6
22
18
16
8
20
10
12
14
18
2.5 5 7.5 10 12.5 15 17.5 20 22.5
Taux de compression C
Figure 13 : CS fonction de C et T4
Taux de compression = 4 ... 20
CS [g/(kN.s)] T4 = 1000 ... 1500 [K]
36
15
00
14
34
00
13
32
00
120
30 1%
0
110
0
28
1 00 0
26 4
24
20
6
22
18 8
16 10
20 14 12
18
20 30 40 50 60
FN [kN]
Figure 14 : CS fonction de FN, C et T4
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 43 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Taux de compression = 4 ... 20
CS [g/(kN.s)] T4 = 1000 ... 1500 [K]
36
4
34
32
6
30 1%
8
28
10
12
26 4 14
16
18
24 20
6 20
22
8 18
16
20 10
12
18
1000 1200 1400 1600
T4 [K]
Figure 15 : CS fonction de C et T4
Taux de compression = 4 ... 20
FN [kN] T4 = 1000 ... 1500 [K]
65
6
60
4
55
50
45
40
6
35 8
10
12
30
14
16
25
18
20
20
1000 1200 1400 1600
T4 [K]
Figure 16 : FN fonction de C et T4
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 44 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
La figure 14 trace l’évolution de la CS en fonction de FN pour différentes valeurs de C et T4. Ce
type de représentation permet de cibler rapidement des valeurs approchées de C et T4 compte tenu
des objectifs de performances en FN et CS.
La figure 15 montre que l’évolution de la CS en fonction de T4 est pratiquement linéaire bien
qu’influencée par le rendement de combustion à faibles T4.
La figure 16 montre aussi une évolution relativement linéaire de FN en fonction de T4 bien
qu’influencée elle aussi par le rendement de combustion à faibles T4 (faible richesse injectée dans la
chambre de combustion) et à fortes T4 (forte richesse injectée dans la chambre de combustion).
Fonctionnement avec post-combustion (avec rechauffe)
En prenant l’hypothèse d’une régulation de la post-combustion à T7 constante et égale à 1930 K
dans le cas de l’ATAR 09K50, l’évolution de FN reste similaire de celle sans rechauffe comme le
montre la figure 17 en comparaison de la figure 12. Dans le cas de l’ATAR 09K50, cela se traduit
par une poussée qui croit de 4770 daN en PG SEC à 6830 daN en PG PC, la température de sortie
T7 passant de 930 K en PG SEC à 1930 K en PG PC, soit une augmentation de près de 1000°.
Taux de compression = 4 ... 20
FN (kN) T4 = 1000 ... 1500 [K]
90
1500
1400
80
1300
70 1200
60
1100
8
6
10
12
4
14
50
16
18
40
1000
20
30
2.5 5 7.5 10 12.5 15 17.5 20 22.5
Taux de compression
Figure 17 : FN fonction de C et T4 en PC
L’évolution de la CS est quant à elle très différente entre le PG SEC et le PG PC comme le montre
la figure 18 en comparaison de la figure 13. En effet, le choix d’une régulation à T7 constante et
égale à 1930 K, impose lorsque la T4 et donc la T6 sont faibles, d’injecter un débit de carburant plus
important pour atteindre la valeur de T7 requise. C’est pourquoi, on constate une élévation très
rapide de la CS à faible T4 et fort C qui peut quadrupler voire quintupler. Cependant, en règle
générale, la CS ne fait que doubler passant dans le cas de l’ATAR 09K50 de 1 kg/h/daN (26 g/s/kN)
à 2 kg/h/daN (52 g/s/kN).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 45 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Pour conclure, cette première analyse, menée sur l’architecture la plus simple, celle du
turboréacteur monocorps monoflux, montre la nécessité de trouver un compromis dans le choix du
taux de compression, un fort taux de compression diminuant fortement la CS en fonctionnement sec
mais impactant aussi le niveau de poussée FN à la baisse. De même, il est bon de prendre une
température T4 la plus faible possible pour obtenir la meilleure durée de vie possible des turbines et
conserver des marges de poussée ultérieure. La détermination plus ou moins rapide des paramètres
de dimensionnement dépend alors de l'expérience du concepteur.
Taux de compression = 4 ... 20
CS [g/(kN.s)] T4 = 1000 ... 1500 [K]
20
110 1000
100
18
90
16
80 1%
14
12
70
4
10
1100
6
60
1200
50
1300
1400
1500
40
2.5 5 7.5 10 12.5 15 17.5 20 22.5
Taux de compression
Figure 18 : CS fonction de C et T4 en PC
Turbomachine double corps double flux séparés
Le moteur militaire Larzac et le moteur civil CFM56-2 sont deux exemples de turbomachines
double corps double flux séparés sans rechauffe.
Ces deux exemples permettent d’explorer au point 0/0 l’influence du taux de dilution d’une part,
qui est respectivement de 1 et de 6 pour ces deux moteurs, et d’autre part l’influence du taux de
compression HP (respectivement 4,8 et 7 pour le CFM56-2) et de la température entrée turbine T4
(respectivement 1430 et 1540 K).
Pour une T4 constante, ici égale à 1540 K, la figure 19 montre clairement que FN et CS décroissent
avec le taux de dilution . Au-delà de l’aspect bénéfique sur la consommation de carburant, il est
alors nécessaire pour atteindre l’objectif de poussée, d’augmenter le débit d’air à l’entrée du moteur
entraînant l’accroissement de facto du diamètre d’entrée du moteur : un optimum doit donc être
recherché entre la CS et le diamètre d’entrée du moteur qui conditionne sa traînée et dons le besoin
en poussée. Par contre, à iso-, le taux de compression ne joue que très peu sur FN mais permet de
réduire sensiblement la CS.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 46 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Pour ce qui concerne nos deux moteurs, le résultat d’un faible se caractériserait pour le moteur
Larzac par une CS de l’ordre de 0,8 kg/h/daN (23 g/s/kN) et celui d’un fort pour le moteur
CFM56-2 par une CS inférieure à 0,4 kg/h/daN (11 g/s/kN), soit une CS plus de deux fois plus
faible que celle du Larzac.
Quant à l’évolution de FN et CS en fonction de la température T4, elles sont quasiment linéaires
comme dans le cas du moteur monocorps monoflux (voir figures 15 et 16).
Taux de dilution = 1 ... 7
CS [g/(kN.s)] Taux de compression HP= 5 ... 11
24
type Larzac
1
5
22 6
7
8
9
20 10
2
11
18 1%
3
16
4
14
5
6
12
7
type CFM56
10
8
14 16 18 20 22 24 26 28 30 32
FN [kN]
Figure 19 : CS fonction de FN, CHP et
Les études paramétriques montrent (voir figures 20 à 23) qu’il existe des choix optimaux
concernant les paramètres de cycle (, C, …) permettant, entre autres cas de figures, pour un taux
de dilution donné de trouver le taux de compression C optimal permettant de maximiser FS
(optimum.FS) et/ou de minimiser CS (optimum.CS).
Figure 20 : FS fonction de C et Figure 21 : CS fonction de et C
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 47 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
FS CS
Figure 22 : optimum.CS (*) fonction de C Figure 23 : FS et CS fonction de C
Si l'on regarde plus finement la variation de la poussée spécifique FS avec le taux de compression et
le taux de dilution (figure 20), on constate que la poussée spécifique varie assez peu avec le taux de
compression. Par contre, le taux de dilution à une grande influence sur la CS comme le montre la
figure 21.
De plus, pour chaque taux de compression, la courbe de CS fonction de passe par un minimum :
la figure 22 donne l'évolution de ce taux de dilution optimum optimum.CS pour un taux de
compression donné. On constate que cet optimum est compris entre 12 et 15 de taux de dilution,
valeur assez largement supérieure à celle constatée aujourd'hui sur les moteurs civils, leur taux de
dilution se situant plutôt entre 5 et 10. Seuls les très gros moteurs actuels, tel que le GE90 par
exemple, sont proches de cet optimum avec un taux de compression de 40-45 et un taux de dilution
supérieur à 9.
La figure 23 donne l'évolution de la poussée spécifique et de la consommation spécifique pour un
taux de dilution optimum donné. On constate que l'optimum de CS se situe au fort taux de
compression, alors que la poussée spécifique est toujours meilleure à faible taux de compression.
L'amélioration de la consommation étant primordiale en regard des contraintes de débit ou de
poussée, il est clair que la tendance des gros moteurs civils sera d'avoir les taux de compression les
plus importants.
Turbomachine double corps double flux mélangés avec rechauffe
Le moteur militaire M88-2 développé par Snecma est un exemple de turbomachines double corps
double flux mélangés avec rechauffe. Cet exemple permet d’explorer au point 0/0 d’une part
l’influence du taux de dilution égal à 0,3 pour ce qui concerne le M88-2 et d’autre part l’influence
du taux de compression HP et de la température entrée turbine T4. maximale ("red-line").,
respectivement de 6,3 et de 1850 K.
Le fait que la configuration soit ici à flux mélangés et non plus à flux séparés ne change pas
fondamentalement les évolutions de FN et CS présentées aux paragraphes précédents.
Par contre, elle contraint fortement les choix notamment pour ce qui concerne le taux de dilution du
fait de la contrainte liée à l’égalité des pressions statiques de part et d’autre de la tôle de confluence
(condition de Kutta) : toutes les solutions ne sont donc pas possibles et l’augmentation du taux de
dilution se traduit alors par une baisse du taux de compression de la soufflante.
La figure 24 démontre l’intérêt de mélanger le plus parfaitement possible les flux primaire et
secondaire (plans 56 et 16) au niveau de la confluence (plan 6). En effet, si le mélange est imparfait,
par exemple si le rendement de mélange est égal à 0,5 comme dans le cas présent, alors l’impact
peut être de l’ordre de 1 % à la fois sur FN (diminution de 1 % de FN) et sur la CS (augmentation
de 1 % de la CS).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 48 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Design Bypass Ratio = 0,2 ... 0,6
HP Compressor Pressure Ratio = 5 ... 9
24
0,2
5
0,3
23
0,4
1%
22
8
0,5
CS [g/(kN*s)]
21
0 ,6
20
19
18
34 36 38 40 42
FN [kN]
Figure 24 : CS fonction de FN, CHP et
Il est donc important d’améliorer le mélange et dans certains cas de l’accélérer par la mise en place
de dispositifs tels que des mélangeurs à lobes comme nous le verrons dans le chapitre 7.
Statoréacteur
Le statoréacteur est le concept de turbomachines le plus simple puisqu’il ne possède aucune partie
tournante.
0 2 6 61 7 8 9
Figure 25 : schéma d’un statoréacteur
La compression est en effet réalisée par la vitesse V0 d’avancement de l’avion dont le domaine de
vol est fortement supersonique.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 49 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
A titre indicatif, en théorie des gaz parfaits, l’équation (1) donne un "taux de compression
équivalent" proportionnel au Mach de vol M0 égal à :
- 17 pour un Mach de vol M0 de 2,5
- proche de 37 pour un Mach de vol M0 de 3.
La poussée est donc directement liée au débit de carburant injecté donc à T7 et la CS passe d’une
évolution quasiment linéaire à une évolution exponentielle lorsque la température T7 en sortie de
chambre de combustion augmente, le rendement de combustion se dégradant peu à peu (voir figure
26).
Enfin, le domaine de vol des statoréacteurs étant très fortement supersonique, ils ont la particularité
d’être équipés d’une tuyère convergente-divergente de manière à maximiser la poussée par
l’adéquation de la pression statique des gaz Ps9 à la pression statique extérieure Ps0.
T7 = 2000 ... 2400 [K]
62
T7 = 2400 K
60
CS [g/(kN.s)]
1% T7 = 2300 K
58
56 T7 = 2200 K
T7 = 2100 K
54
T7 = 2000 K
52
19 20 21 22 23 24 25
FN [kN]
Figure 26 : évolution de CS et FN fonction de T7
Turbopropulseur et turbomoteur
Le dimensionnement des turbomachines de puissance à turbine libre et à turbine liée, telles que les
turbomoteurs ou les turbopropulseurs, nécessite de dimensionner simultanément la turbine et la
tuyère.
En effet, la puissance WP prélevée par la turbine de puissance entre les plans 49 et 5 s’écrit sous la
forme :
. WP D 5 H(T5 , 5 ) H(T49 , 49 ) (111)
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 50 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
49 5 8
Figure 27 : turbomoteur double corps monoflux à turbine libre
avec :
(T5 , 5 ) (T49 , 49 )
P5 Tpoly
. 10 (112)
P49
. P8 P5 TU (113)
De plus, la tuyère étant divergente, nous aurons nécessairement égalité entre la pression statique
extérieure Ps0 et la pression statique en sortie de tuyère Ps8 avec :
. Ps 0 Ps 8 P8 (114)
La figure 28 présente la plage de variation maximum de WP en fonction de P8 compte tenu des
contraintes d’encombrement (A8) et celles liées à l’aérodynamique (M8) et donc aux pertes de
charge le long des parois de la tuyère divergente.
WP La relation (114) montre que WP est nécessairement
WPmax limitée par le haut (WPmax) par l’égalité P8 = Ps8.
Cette valeur WPmax correspond à M8 = 0 équivalent à
une section de sortie tuyère A8 infinie donc non
réaliste. En pratique, pour les turbomachines
industrielles, on peut se rapprocher de cette valeur,
WPobj la section de sortie tuyère n’étant que faiblement
WPmin P8 contrainte par l’encombrement. Un optimum existe
Ps8 P8max cependant, l’augmentation de la longueur des parois
de la tuyère divergente liée à l’accroissement du taux
A8 de détente entraînant un accroissement des pertes de
charge par frottement.
Pour un turbomoteur ou un turbopropulseur, le
maître couple imposé par l’avionneur va amener à
A8max dimensionner la puissance (WPobj) pour une section
A8 inférieure ou égale à A8 maximale (A8max),
A8min M8 limitant le taux de détente maximal. Néanmoins, ce
0 M8max désavantage est compensé par une poussée résiduelle
plus importante de par l’échappement des gaz au
Figure 28 : WP fonction P8 et M8 travers de la tuyère à une pression supérieure.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 51 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
A l’opposé, un trop faible prélèvement de puissance (WPmin) conduit à un Mach M8 très important
(M8max) donc à une tuyère très fermée (A8min) dans laquelle à l’extrême : P8 P8 max P49 TU . Dans
les faits, cette limite est atteinte lorsque le rapport entre la pression totale dans le plan 8 (P8) et la
pression statique extérieure (Ps0) devient supérieur à la valeur obtenue en appliquant l’équation (1)
en gaz parfaits (ou (1r) en gaz réels), soit 1,86 :
8
1
2 8 1
. P8 Ps 0 1 8 M8 > Ps0 . 1,86 avec 8 = 1,35
2
Il est alors nécessaire soit d’imposer WPmini, soit de réviser le calcul de cycle pour réduire P49. En
pratique, A9 = A8 impose de fait cette limitation.
Taux de compression = 7 ... 19
CS [kg/(kW.h)] T4 = 1250 ... 1650 [K]
.34
1250
7
1350
.32
1450
155
165
0
0
.30 1%
11
13
19 1 15
.28 7
.26
.24
.22
600 800 1000 1200 1400 1600
Puissance sur arbre [kW]
Figure 29 : CS fonction de WP, C et T4
On voit que le choix de A8 est en conséquence plus délicat que pour un turboréacteur.
Notons enfin que les turbomoteurs d’hélicoptères doivent être capables de fournir de un à trois
niveaux de puissance maximale d’urgence (PMU) d’une durée qui s’échelonne de 30 secondes à 5
minutes selon la puissance requise : faible puissance sur une longue durée et forte puissance sur une
courte durée. Si le dimensionnement de la machine est réalisé pour un fonctionnement normal, il est
impératif de vérifier que l’on peut facilement accéder à cette puissance : cette problématique sera
regardée plus en détail dans le chapitre 3.
Si l’on trace les variations combinées de CS et de WP en fonction du taux de compression C et de
la température entrée turbine T4 (figure 29), on confirme l’intérêt d’avoir un taux de compression
élevé pour réduire la CS, le niveau de WP étant quant à lui directement lié au niveau de T4.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 52 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
Taux de compression = 7 ... 19
CS [kg/(kW.h)] T4 = 1250 ... 1650 [K]
.34
50
12
7
05
13
.32
50
14
50
50
15
9
16
.30 1%
11
13
17 15
19
.28
.26
.24
.22
.36 .38 .4 .42 .44 .46 .48 .5
Frésiduelle [kN]
Figure 30 : CS fonction de Frésiduelle, C et T4
Pour ce qui concerne l’évolution de la CS en fonction de la poussée résiduelle, on retrouve une
évolution similaire de celle des turboréacteurs, le niveau de poussée étant bien entendu beaucoup
plus faible (voir figure 30).
Cas particulier des turbopropulseurs
Dans le cas particulier des turbopropulseurs, la relation entre la poussée et la puissance peut être
établie au travers d’une modélisation d’hélice. La modélisation retenue introduit un coefficient sans
dimension C appelé coefficient d’interaction de travail, appliqué d’une part à l’hélice (Chélice) et
d’autre part au "core" du turbopropulseur (Ccore) :
Fhélice V0 hélice WP Whélice
. C hélice (115)
D 0 H(Ts 0 , 0 ) D 0 H(Ts 0 , 0 ) D 0 H(Ts 0 , 0 )
Frésiduelle V0
. Ccore (116)
D 0 H(Ts 0 , 0 )
la poussée F du turbopropulseur étant la somme de la poussée due à l’hélice (Fhélice) et de la poussée
résiduelle du turbopropulseur (Frésiduelle) :
hélice WP
. F Fhélice Frésiduelle + D8 V8 D 0 V0 (117)
V0
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 53 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
avec :
. Frésiduelle D8 V8 D 0 V0 (118)
Le rendement d’hélice est en général décrit par les relations suivantes :
. hélice 10 M 0 hélice. max pour M0 0,1 (119)
. hélice hélice. max pour 0,1 M0 0,7 (120)
M 0,7
. hélice 1 0 hélice. max pour 0,7 M0 0,85 (121)
3
avec un rendement maximal de l’hélice hélice.max de l’ordre de 0,9 incluant les pertes dues au
réducteur (voir figure 31).
1,0
0,9
0,8
0,7
hélice
0,6
0,5
0,4
0,3
0,2
0,1
0,0
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Mach de vol M0
Figure 31 : rendement de l’hélice (hélice.max = 0,9)
On peut alors tracer les courbes de poussée spécifique FS et de consommation spécifique CS en
fonction du taux de détente T dans la turbine de puissance.
Les études paramétriques montrent (voir figures 32 à 35) qu’il existe des choix optimaux
concernant les paramètres de cycle (C, T, …) permettant, entre autres cas de figures, pour un taux
de compression C donné de trouver le taux de détente optimal dans la turbine T permettant de
maximiser FS (T.optimum.FS) et/ou de minimiser CS (T.optimum.CS).
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 54 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
CS
Figure 32 : FS fonction de C et T Figure 33 : CS fonction de C et T
T* FS CS
Figure 34 : T.optimum.CS (T*) fonction de C Figure 35 : FS et CS optimum fonction de C
Pour les taux de compression généralement constatés pour les turbopropulseurs, le taux de détente
optimum permettant d’optimiser à la fois FS et CS se situe aux alentours de 0,5.
CONCLUSION
La méthodologie de calcul du cycle thermodynamique d’une turbomachine présentée dans ce
chapitre permet de déterminer les performances d’une turbomachine (F, CS, …) quelle qu’en soit
l’architecture. En effet, bien que ce chapitre se soit plus particulièrement focalisé sur les
applications aéronautiques des turbomachines (turboréacteur, turbomoteur, turbopropulseur, …), la
description sous forme modulaire des différents composants constituant une turbomachine permet
de couvrir n’importe quelle application. Les bancs d’essais moteur sont l’un des exemples les plus
concrets d’une application non aéronautique qui réussit à combiner l’ensemble des constituants
(compresseur, turbine, chambre de combustion, …) dans des montages spécifiques (réchauffeur,
détendeur, …), l’objectif étant de créer indépendamment les unes des autres les conditions de
pression, de débit et de température représentatives de l’environnement des composants à tester.
Le logiciel Gasturb dont les résultats ont imagé ce chapitre, est un outil de calcul couramment
utilisé par les industriels pour mener à bien les premières démarches d’optimisation de
l’architecture d’un nouveau moteur et de ses principales caractéristiques de cycle : taux de
compression, taux de dilution, température entrée turbine, …
Lors du développement d’un moteur, ces premières optimisations sont ensuite reprises et
poursuivies à l’aide de ce logiciel et/ou de logiciels propres à chaque industriel, ces logiciels
intégrant dans leurs bases de données (champs compresseur et turbine, modélisation des rendements
et pertes de charge, …), l’expérience du constructeur acquise depuis parfois plus de 50 ans de
recherche, d’essais et de développement.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 55 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
ANNEXE 1
APPROXIMATION PAR LA METHODE DES GAZ PARFAITS APPROCHEE
La modélisation d’une compression ou d’une détente au travers de la fonction thermodynamique
enthalpie H est la modélisation la plus complète : elle nécessite toutefois des calculs complexes qui
peuvent s’avérer trop longs pour des analyses temps réels. Des modélisations simplifiées peuvent
donc s’avérer nécessaires pour des analyses rapides de comportement moteur comme nous le
verrons aux chapitres 4 et 5 relatif à la régulation des turbomachines.
Il faut donc trouver une méthode qui permette de retranscrire les équations gaz réels dans un calcul
simplifié. Le modèle gaz parfaits est la meilleure solution.
Considérons une compression adiabatique avec échange de travail à débit constant. Le modèle gaz
parfaits ne s’applique que si l’on trouve un Cp constant qui permette d’approcher avec une
précision suffisante les résultats gaz réels.
On a :
Cp
. W D H(T2 , 2 ) H (T1 , 1 ) D Cp dT
2
Cp2
1
Géométriquement, cette équation se traduit par Cp1
l’aire W sur la figure A1.1 ci-contre, la courbe W
étant concave pour une température T supérieure
ou égale à 500 K environ et convexe pour une T
température inférieure (voir annexe 2.1 du cours T1 T2
de Thermodynamique).
Figure A1.1
Afin d’approcher rapidement la valeur de W, deux approximations sont proposées, ces deux
méthodes étant d’autant plus précises que la viciation reste constante entre l’entrée et la sortie du
composant considéré. Ce dernier point, s’il est normalement respecté pour les compresseurs, n’est
pratiquement jamais respecté dans le cas des turbines lorsque celles-ci sont refroidies par de l’air
normalement non vicié prélevé dans le compresseur. Nous négligerons cependant cet aspect dans le
cas des turbines.
La première méthode consiste à approximer par
Cp
un trapèze la partie supérieure de l’aire W’
comme présenté en figure A1.2 avec : Cp2
Cp(T2 ) Cp(T1 )
. W ' Cp(T1 ) T T
2 Cp1
Cp(T2 ) Cp(T1 ) W’
T
2
T
Cette approximation conduit cependant à T1 T2
minimiser W si l’évolution de Cp en fonction de
la température est concave et à surestimer W si Figure A1.2
l’évolution de Cp est convexe.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 56 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
La deuxième méthode consiste à approximer par Cp
la température moyenne Tm comme présenté en
figure A1.3 avec : Cp2
Cpm
T T2
. W ' ' Cp 1 , T CpTm , T Cp1
2 W’’
Cette approximation conduit quant à elle à
T
surestimer W si l’évolution de Cp en fonction de T1 Tm T2
la température est concave et à sous-estimer W si
l’évolution de Cp est convexe. Figure A1.3
En conclusion, ces deux méthodes sont chacune optimales dans une gamme de température
différente, la première l’étant à faible température donc plus particulièrement adaptée au calcul des
compresseurs basse pression. Cependant, l’objectif étant de disposer d’une méthode unique adaptée
à l’ensemble du calcul du cycle thermodynamique, c’est la deuxième méthode qui a été retenue
dans ce cours, l’imprécision de cette méthode étant limitée à environ 0,2 % des résultats en gaz
réels.
Cas spécifique des chambres de combustion et rechauffes
Dans le cas particulier des chambres de combustion et rechauffes, la richesse évolue fortement entre
l’entrée et la sortie du composant. Dans ce cas, la modélisation retenue pour les équations (45) et
(78) de ce cours, est de considérer non pas une richesse moyenne sur le composant mais la richesse
en sortie du composant. Cette hypothèse permet de réduire l’imprécision de cette méthode à environ
0,7 % maxi des résultats en gaz réels.
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 57 -
Cours de Turbomachines - 2017, Jean-Pierre et Catherine DEVAUX COURS 02
ANNEXE 2
BIBLIOGRAPHIE
[1] Aircraft Engine Design
J. D. Mattingly, W.H. Heiser and D. H. Daley
Edition AIAA Education Series
[2] Turbine à gaz WR21 : le moteur naval du 21ème siècle
Frédéric DANAN
Calcul du cycle d’adaptation - Edition au 01/09/2017 - 58 -
S-ar putea să vă placă și
- 2 1Document24 pagini2 1Heed JiiÎncă nu există evaluări
- Sujet 2012 ForeuseDocument16 paginiSujet 2012 ForeuseRhô ThalesÎncă nu există evaluări
- Cours Aéronautique Partie5Document8 paginiCours Aéronautique Partie5Fatima FatimaÎncă nu există evaluări
- J2911 Installations de Pompage - Phases de Réalisation Et Dexploitation PDFDocument12 paginiJ2911 Installations de Pompage - Phases de Réalisation Et Dexploitation PDF10teste10100% (1)
- 2010 BEPA E3 Agroéquip FR Réu AntDocument11 pagini2010 BEPA E3 Agroéquip FR Réu Antبلال بن عميرهÎncă nu există evaluări
- Pfe GM 0266Document67 paginiPfe GM 0266Walid SouidÎncă nu există evaluări
- TP Turbomachine (Travail Demandé)Document2 paginiTP Turbomachine (Travail Demandé)Andy BenÎncă nu există evaluări
- EXAMEN FINAL DE MAINTENANCE DES EQUIPEMENTS ELECTRO MECA MIP2 - Copie BonDocument4 paginiEXAMEN FINAL DE MAINTENANCE DES EQUIPEMENTS ELECTRO MECA MIP2 - Copie BonsomomarctinoÎncă nu există evaluări
- Rapport de Stage SC3-GPDF SouafiDocument26 paginiRapport de Stage SC3-GPDF Souafirahimemahi100% (1)
- Classification Des Moteurs ThermiquesDocument5 paginiClassification Des Moteurs ThermiquesGuy Ygal0% (1)
- Injection-Essence BacDocument7 paginiInjection-Essence BacJoão DantasÎncă nu există evaluări
- Corrigé Bac Pro MEI 2020Document14 paginiCorrigé Bac Pro MEI 2020HakobyanÎncă nu există evaluări
- Cycles de Puissance À GazDocument27 paginiCycles de Puissance À GazNader FarhatÎncă nu există evaluări
- Manuel Utilisateur 2014Document37 paginiManuel Utilisateur 2014Med Zakaria HamidÎncă nu există evaluări
- Comp Mec4270Document27 paginiComp Mec4270Abderrahman AissatiÎncă nu există evaluări
- Epreuve Ecrite Dadmissibilite n1 - CompressDocument13 paginiEpreuve Ecrite Dadmissibilite n1 - CompressZouhaier GhanmiÎncă nu există evaluări
- TD 1 Et 2. Théorie Des Pompes. Année 5Document5 paginiTD 1 Et 2. Théorie Des Pompes. Année 5Fall St100% (1)
- Takeoff LandingDocument345 paginiTakeoff LandingYvan NgueyemÎncă nu există evaluări
- Explorc M2 V4Document3 paginiExplorc M2 V4ait hssainÎncă nu există evaluări
- CR Lemilia Charruau Cyprien RignaultDocument9 paginiCR Lemilia Charruau Cyprien Rignaultapi-641115363Încă nu există evaluări
- Pompes Et Compresseurs Exercices Et ProblemesDocument21 paginiPompes Et Compresseurs Exercices Et ProblemesHoussame Naim50% (2)
- Travaux Dirigés Série 6Document6 paginiTravaux Dirigés Série 6copie masterÎncă nu există evaluări
- Pompe 2Document24 paginiPompe 2Ferchichi HatemÎncă nu există evaluări
- FASCICULE_TP_MOTEUR_2020-2021 (3)Document37 paginiFASCICULE_TP_MOTEUR_2020-2021 (3)louna yunaÎncă nu există evaluări
- tp-2 Pratique Moteur VMDocument12 paginitp-2 Pratique Moteur VMEnzo Marotta100% (2)
- BTS AVA 2002 Distribution VariableDocument17 paginiBTS AVA 2002 Distribution Variablelilaupc100% (1)
- TP 2Document9 paginiTP 2ibrahim rabbajÎncă nu există evaluări
- TP 2 Turbomachine Turbine Pelton (Travail Demandé)Document5 paginiTP 2 Turbomachine Turbine Pelton (Travail Demandé)Younes ChaoucheÎncă nu există evaluări
- Tp-2 Pratique Moteur PDFDocument10 paginiTp-2 Pratique Moteur PDFEnzo MarottaÎncă nu există evaluări
- TP Compresseur PDFDocument16 paginiTP Compresseur PDFmerwa sefirÎncă nu există evaluări
- CCMP MP 2021 LHEEA SujetDocument32 paginiCCMP MP 2021 LHEEA SujetJules ThoravalÎncă nu există evaluări
- Carburants Diesel Et Jet-FuelDocument32 paginiCarburants Diesel Et Jet-FuelMohamed RjebÎncă nu există evaluări
- Examen 2019 CCDocument6 paginiExamen 2019 CCKHALIL IDRISSI0% (1)
- Le Fuel-GazDocument45 paginiLe Fuel-GazYacine Boufeniche100% (3)
- Ml4ascp DT CopieDocument14 paginiMl4ascp DT CopieEmpire LalouÎncă nu există evaluări
- Notes Sur Turbos - 2006Document10 paginiNotes Sur Turbos - 2006ilyes selkaÎncă nu există evaluări
- Corrigé TSDEEA 1ADocument5 paginiCorrigé TSDEEA 1AOualid Ouadoudi88% (8)
- Sergaz RapportDocument40 paginiSergaz Rapportrabie letaifÎncă nu există evaluări
- Pfe GM 0127 PDFDocument99 paginiPfe GM 0127 PDFAnthony MayÎncă nu există evaluări
- Enoncé Du TP - TAGDocument6 paginiEnoncé Du TP - TAGZakaria Maazaz100% (1)
- Le Turbo Met Les Gaz: Les Turbines en ÉquationDocument5 paginiLe Turbo Met Les Gaz: Les Turbines en Équationmadou gana IbrahimÎncă nu există evaluări
- PompeDocument12 paginiPompeamineÎncă nu există evaluări
- Charge MentDocument10 paginiCharge MentSaid MdjÎncă nu există evaluări
- Cours Rey 1Document87 paginiCours Rey 1Most ImadÎncă nu există evaluări
- 9936 E4 02ed18 Cor 15012018 Def CopieDocument13 pagini9936 E4 02ed18 Cor 15012018 Def CopieRonny kurtis BoufougouÎncă nu există evaluări
- M07 - Etude Des Moteurs ThermiquesDocument42 paginiM07 - Etude Des Moteurs ThermiquesBASSILIST76% (21)
- TP1 GM L3 Moteur DieselDocument8 paginiTP1 GM L3 Moteur DieselÆbđęł WāhäbÎncă nu există evaluări
- Dimensionnement Du DistributeurDocument21 paginiDimensionnement Du DistributeurzakiaÎncă nu există evaluări
- Pilotefrigo NNVolum DPDocument27 paginiPilotefrigo NNVolum DPPaul AlainÎncă nu există evaluări
- TurboDocument46 paginiTurboMechmed100% (7)
- Application 3 Moto Compresseur D Air A Piston PDFDocument10 paginiApplication 3 Moto Compresseur D Air A Piston PDFHajar NhailaÎncă nu există evaluări
- Systèmes Refroidissement Et LubrificationDocument64 paginiSystèmes Refroidissement Et LubrificationMK DCÎncă nu există evaluări
- Théorie et pratique du treuil: Treuils fixes et mobilesDe la EverandThéorie et pratique du treuil: Treuils fixes et mobilesÎncă nu există evaluări
- Aide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesDe la EverandAide-mémoire de mécanique pratique: A l'usage des officiers d'artillerie et des ingénieurs civils et militairesÎncă nu există evaluări
- Traité d'économétrie financière: Modélisation financièreDe la EverandTraité d'économétrie financière: Modélisation financièreÎncă nu există evaluări
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1De la EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Încă nu există evaluări
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesDe la EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesEvaluare: 2 din 5 stele2/5 (1)
- La Cryotherapie Gazeuse HyperbareDocument172 paginiLa Cryotherapie Gazeuse Hyperbarehana tiÎncă nu există evaluări
- Master CFDocument3 paginiMaster CFAmine Niyak BouzabÎncă nu există evaluări
- Cryotherapie Générale Dans La Médecine Du SportDocument6 paginiCryotherapie Générale Dans La Médecine Du Sporthana tiÎncă nu există evaluări
- Master CFDocument3 paginiMaster CFAmine Niyak BouzabÎncă nu există evaluări
- Cryogenie Kaelte F D Lebensmittelind FRDocument7 paginiCryogenie Kaelte F D Lebensmittelind FRhana tiÎncă nu există evaluări
- These Bradu PDFDocument250 paginiThese Bradu PDFOumaima ElyousfiÎncă nu există evaluări
- Introduction Cryogenie 2016Document18 paginiIntroduction Cryogenie 2016hana tiÎncă nu există evaluări
- Cryogenie 12Document8 paginiCryogenie 12Wãłîď ãmřîÎncă nu există evaluări
- Ajp jp3v1p249Document12 paginiAjp jp3v1p249hana tiÎncă nu există evaluări
- These Bradu PDFDocument250 paginiThese Bradu PDFOumaima ElyousfiÎncă nu există evaluări
- These Bradu PDFDocument250 paginiThese Bradu PDFOumaima ElyousfiÎncă nu există evaluări
- MTTH PDFDocument75 paginiMTTH PDFAyoub Magroud100% (1)
- Bulletin de lIIF N 2003 6 PDFDocument9 paginiBulletin de lIIF N 2003 6 PDFhana tiÎncă nu există evaluări
- Bulletin de lIIF N 2003 6 PDFDocument9 paginiBulletin de lIIF N 2003 6 PDFhana tiÎncă nu există evaluări
- Master CFDocument3 paginiMaster CFAmine Niyak BouzabÎncă nu există evaluări
- Master CFDocument3 paginiMaster CFAmine Niyak BouzabÎncă nu există evaluări
- Les Textes Officiels Pour L'école Primaire: E Projet D ÉcoleDocument65 paginiLes Textes Officiels Pour L'école Primaire: E Projet D Écolehana tiÎncă nu există evaluări
- Master CFDocument3 paginiMaster CFAmine Niyak BouzabÎncă nu există evaluări
- Modelisation Numerique Sous MATLAB PDFDocument12 paginiModelisation Numerique Sous MATLAB PDFhana ti100% (1)
- P Raymond Bts Mai PneumatiqueDocument62 paginiP Raymond Bts Mai PneumatiqueJules JoeÎncă nu există evaluări
- Bus M 2016 Brahimi Aghilas PDFDocument207 paginiBus M 2016 Brahimi Aghilas PDFhana tiÎncă nu există evaluări
- page de gardefinalpdf-مدمجDocument114 paginipage de gardefinalpdf-مدمجhana tiÎncă nu există evaluări
- Matlabpde PDFDocument11 paginiMatlabpde PDFhana tiÎncă nu există evaluări
- 103 A18 Fouad Menasria BiskraDocument7 pagini103 A18 Fouad Menasria Biskrahana tiÎncă nu există evaluări
- 1 - LES PRINCIPALES SOURCES DE POLLUTION. Pour Les Moteurs Thermiques Différentes Sources de Rejets de Polluants Sont Possibles.Document6 pagini1 - LES PRINCIPALES SOURCES DE POLLUTION. Pour Les Moteurs Thermiques Différentes Sources de Rejets de Polluants Sont Possibles.hana tiÎncă nu există evaluări
- 103 A18 Fouad Menasria BiskraDocument7 pagini103 A18 Fouad Menasria Biskrahana tiÎncă nu există evaluări
- Chapitre IIDocument12 paginiChapitre IIhana tiÎncă nu există evaluări
- AERODocument6 paginiAEROhana tiÎncă nu există evaluări
- GasDyn BookDocument73 paginiGasDyn BookKaffelÎncă nu există evaluări
- PH3-stabilite Correction PDFDocument27 paginiPH3-stabilite Correction PDFhana tiÎncă nu există evaluări
- Rapport - Raphael PION - ALCASAR V3Document39 paginiRapport - Raphael PION - ALCASAR V3Ghofrane FerchichiÎncă nu există evaluări
- TP #5Document6 paginiTP #5Poco LaÎncă nu există evaluări
- P - Etude6 - Les LiaisonsDocument4 paginiP - Etude6 - Les LiaisonsSamsun GalaxÎncă nu există evaluări
- L'innovation Dans L'événementiel SportifDocument5 paginiL'innovation Dans L'événementiel SportifhealthcareexpooÎncă nu există evaluări
- Python Pour Les NulsDocument549 paginiPython Pour Les NulsBelhamidi Mohammed Houssame88% (16)
- CH Org TD 9Document6 paginiCH Org TD 9Jean omer KoneÎncă nu există evaluări
- 5 - Business ModeleDocument5 pagini5 - Business ModeleBassma AzarhounÎncă nu există evaluări
- Correction-Exo-3-TD No-3-SMI-S1-ABDocument5 paginiCorrection-Exo-3-TD No-3-SMI-S1-ABAbdel ouameurÎncă nu există evaluări
- Teyliom Group RecruteDocument1 paginăTeyliom Group RecruteHassane AmadouÎncă nu există evaluări
- Matlab Octave Cours JDBonjour 2016 09 26 PDFDocument181 paginiMatlab Octave Cours JDBonjour 2016 09 26 PDFAlemÎncă nu există evaluări
- Champions of Hara Doc FRDocument18 paginiChampions of Hara Doc FRRik ShuratoÎncă nu există evaluări
- L'utilisation Clinique Des Minis VisDocument133 paginiL'utilisation Clinique Des Minis VisAmira MansourkhodjaÎncă nu există evaluări
- Imagerie Des Fractures Du RocherDocument9 paginiImagerie Des Fractures Du RocherOussama AbounasrÎncă nu există evaluări
- La Qualité en Mouvement: EFQMDocument40 paginiLa Qualité en Mouvement: EFQMNathalie ZaidÎncă nu există evaluări
- 8 Réalisation Des Activités OpérationnellesDocument33 pagini8 Réalisation Des Activités OpérationnellesKarim DjeffalÎncă nu există evaluări
- Khedmtii 3Document6 paginiKhedmtii 3nadjmob3Încă nu există evaluări
- Pompes Flygtk NDocument16 paginiPompes Flygtk NSamir PosibleÎncă nu există evaluări
- Chap 1 GéolocalisationDocument13 paginiChap 1 GéolocalisationGabin Kenny de Manuel TRIGOÎncă nu există evaluări
- CGL 2016 Anglais Rapport de JuryDocument5 paginiCGL 2016 Anglais Rapport de JurySaeclusÎncă nu există evaluări
- AL-prétirés DDMDocument14 paginiAL-prétirés DDMGiacomo AngeliniÎncă nu există evaluări
- Projection Du Secteur RéelDocument24 paginiProjection Du Secteur RéelAbdoulaye NdongÎncă nu există evaluări
- Poutres en BA Ou BPDocument10 paginiPoutres en BA Ou BPCastiglianoÎncă nu există evaluări
- TD Compresseur e PDFDocument8 paginiTD Compresseur e PDFntab100% (1)
- FD 13-4Document11 paginiFD 13-4olympioÎncă nu există evaluări
- Revue MarschDocument73 paginiRevue MarschTens AiepÎncă nu există evaluări
- Examen 2021Document5 paginiExamen 2021Camelea AlxÎncă nu există evaluări
- 1as dc1 PDFDocument18 pagini1as dc1 PDFAhmed benabdelkaderÎncă nu există evaluări
- El Watan Du 21.07.2013Document22 paginiEl Watan Du 21.07.2013nacer_2Încă nu există evaluări
- Universite D'Antananarivo: Departement Bâtiment Et Travaux PublicsDocument284 paginiUniversite D'Antananarivo: Departement Bâtiment Et Travaux PublicsIlias ElmaaloumÎncă nu există evaluări
- MEAG MDDX 66499 13 FR 1509Document300 paginiMEAG MDDX 66499 13 FR 1509xbruneauÎncă nu există evaluări