S-ar putea să vă placă și
- Christian Borch & Gernot Bohme & Olafur Eliasson & Juhani Pallasmaa - Architectural Atmospheres-BirkhauserDocument112 paginiChristian Borch & Gernot Bohme & Olafur Eliasson & Juhani Pallasmaa - Architectural Atmospheres-BirkhauserAja100% (1)
- Security Operating Procedures and StandardsDocument5 paginiSecurity Operating Procedures and StandardsQuy Tranxuan100% (2)
- Wolfgang Tillmans - NoticeDocument74 paginiWolfgang Tillmans - NoticeSusana Vilas-BoasÎncă nu există evaluări
- A) What Is Haptics'?: Haptic Technology Refers To Technology That Interfaces TheDocument25 paginiA) What Is Haptics'?: Haptic Technology Refers To Technology That Interfaces TheJyoshna ChinniÎncă nu există evaluări
- Hap ReportDocument18 paginiHap ReportsachinsomannaÎncă nu există evaluări
- Haptic Technology: A Seminar ReportDocument24 paginiHaptic Technology: A Seminar ReportNeelabh PantÎncă nu există evaluări
- Haptic TechnologyDocument37 paginiHaptic Technologyajnab143Încă nu există evaluări
- Seminar Report On HapticDocument20 paginiSeminar Report On HapticPoonam ThakurÎncă nu există evaluări
- Ha Te ReDocument20 paginiHa Te Remanoj guptaÎncă nu există evaluări
- Seminar Report On Haptic RoboticsDocument37 paginiSeminar Report On Haptic RoboticsArunav SinghÎncă nu există evaluări
- Final Report On HapticsDocument36 paginiFinal Report On HapticsKapil ChawlaÎncă nu există evaluări
- Applications of Haptics Technology in Advance Robotics: Vaibhav N. Fulkar Mohit V. ShivramwarDocument5 paginiApplications of Haptics Technology in Advance Robotics: Vaibhav N. Fulkar Mohit V. Shivramwarmonty083Încă nu există evaluări
- Haptic Technology: - A Touch RevolutionDocument6 paginiHaptic Technology: - A Touch RevolutionAditya RamÎncă nu există evaluări
- Submitted By:: R.Jayachandran (James) S.KarthikprabhuDocument26 paginiSubmitted By:: R.Jayachandran (James) S.KarthikprabhuVijay RaghavanÎncă nu există evaluări
- ACKNOWLEDGEMENTDocument25 paginiACKNOWLEDGEMENTSuresh Raghu100% (1)
- Haptic Technology (Touch The VirtualDocument19 paginiHaptic Technology (Touch The VirtualShashank SharmaÎncă nu există evaluări
- Haptic Technology: Touch The Virtual)Document27 paginiHaptic Technology: Touch The Virtual)naga bhargavÎncă nu există evaluări
- Haptic Report 281 29Document46 paginiHaptic Report 281 29Udu KumarÎncă nu există evaluări
- Haptic TechnologyDocument20 paginiHaptic TechnologyARVINDÎncă nu există evaluări
- Shash Haptic TechnologyDocument24 paginiShash Haptic TechnologyShashi KumarÎncă nu există evaluări
- Haptic TechnologyDocument18 paginiHaptic TechnologyMamatha MarriÎncă nu există evaluări
- Haptic: Seminar Taken By: Arun S 9207 S7, CSEDocument22 paginiHaptic: Seminar Taken By: Arun S 9207 S7, CSERavi PilgarÎncă nu există evaluări
- Vdocument - in - Haptics Technologies Site Elsaddikabedwebteachingelg5124pdfchapter PDFDocument23 paginiVdocument - in - Haptics Technologies Site Elsaddikabedwebteachingelg5124pdfchapter PDFJigar ChovatiyaÎncă nu există evaluări
- Haptic Technology: Paper Presentation OnDocument25 paginiHaptic Technology: Paper Presentation OnBharadwaj SanthoshÎncă nu există evaluări
- Haptic TouchDocument4 paginiHaptic TouchMohammed SufiyanÎncă nu există evaluări
- Haptic Technology: A Seminar Topic OnDocument36 paginiHaptic Technology: A Seminar Topic OnjoeÎncă nu există evaluări
- Shash Haptic TechnologyDocument24 paginiShash Haptic Technologyvasantha priyankaÎncă nu există evaluări
- Haptic Technology - Interaction With VirtualityDocument6 paginiHaptic Technology - Interaction With VirtualityVIVA-TECH IJRIÎncă nu există evaluări
- HAPTICS Seminar ReportDocument34 paginiHAPTICS Seminar ReportAlok RanjanÎncă nu există evaluări
- Haptic Technology: Abstract:Ha Ptic Technology, or Haptics, IsDocument31 paginiHaptic Technology: Abstract:Ha Ptic Technology, or Haptics, IsVikas PandeyÎncă nu există evaluări
- Haptic Technology: S.Omprakash 161EC213Document15 paginiHaptic Technology: S.Omprakash 161EC213OM PRAKASH SÎncă nu există evaluări
- Robotics: An Application-Based Review of Haptics TechnologyDocument18 paginiRobotics: An Application-Based Review of Haptics TechnologyKshitijÎncă nu există evaluări
- Haptic TechnologyDocument21 paginiHaptic Technologymrshubi91Încă nu există evaluări
- A Report On Topic: Haptics TechnologyDocument21 paginiA Report On Topic: Haptics TechnologymeenaÎncă nu există evaluări
- Haptic DevicesDocument8 paginiHaptic Devicesdongajay5420Încă nu există evaluări
- Haptic Technology:-A Comprehensive Review of Its Applications and Future ProspectsDocument3 paginiHaptic Technology:-A Comprehensive Review of Its Applications and Future ProspectsRoopa ChowdharyÎncă nu există evaluări
- 1 s2.0 S2096579619300130 MainDocument27 pagini1 s2.0 S2096579619300130 MainUjjal DeyÎncă nu există evaluări
- Introduction To Virtual RealityDocument12 paginiIntroduction To Virtual RealityAnonymous aG7lwJÎncă nu există evaluări
- HAPTICDocument20 paginiHAPTICpiyushÎncă nu există evaluări
- Haptic Interactions in Real & Virtual World Haptic Interactions in Real & Virtual WorldDocument5 paginiHaptic Interactions in Real & Virtual World Haptic Interactions in Real & Virtual WorldSudarshan HmÎncă nu există evaluări
- Virtual Reality: IEEE Potentials May 1998Document6 paginiVirtual Reality: IEEE Potentials May 1998Ãd ÄmÎncă nu există evaluări
- Virtual Environment and Sensori-Motor Activities: Haptic, Audition and OlfactionDocument4 paginiVirtual Environment and Sensori-Motor Activities: Haptic, Audition and OlfactionPedro CoelhoÎncă nu există evaluări
- Haptic Technology AbstractDocument3 paginiHaptic Technology Abstractaniyoor50% (2)
- HapticDocument9 paginiHapticBhaskar vaishnaviÎncă nu există evaluări
- Haptics: Technology Based On TouchDocument4 paginiHaptics: Technology Based On TouchijsretÎncă nu există evaluări
- Forces Vibrations Computer Simulation Teleoperators TactileDocument6 paginiForces Vibrations Computer Simulation Teleoperators TactileNanditha AithaÎncă nu există evaluări
- Haptic TechnologyDocument14 paginiHaptic TechnologyPraveen ShrivastavaÎncă nu există evaluări
- Haptic Technology: A Touch RevolutionDocument7 paginiHaptic Technology: A Touch RevolutionARVINDÎncă nu există evaluări
- Chapter 1 Introduction: 1.1 What Is Haptic' ?Document10 paginiChapter 1 Introduction: 1.1 What Is Haptic' ?Bhavika RajputÎncă nu există evaluări
- Rebecca 2Document2 paginiRebecca 2redtactonaÎncă nu există evaluări
- An Introduction To Virtual Reality Techn PDFDocument4 paginiAn Introduction To Virtual Reality Techn PDFSebastia RomeroÎncă nu există evaluări
- Please Upload A Seminar or Project Report/Code/Material/Presentation HereDocument124 paginiPlease Upload A Seminar or Project Report/Code/Material/Presentation HerePrashant KumarÎncă nu există evaluări
- Understanding Virtual Reality TechnologyDocument19 paginiUnderstanding Virtual Reality TechnologyRonildo OliveiraÎncă nu există evaluări
- Immersive TechnologyDocument11 paginiImmersive TechnologyharshaÎncă nu există evaluări
- Haptic TechnologyDocument15 paginiHaptic Technologyanu sreeÎncă nu există evaluări
- C CCCCCCCCCCCCCCCCCCDocument1 paginăC CCCCCCCCCCCCCCCCCCAbhay KakneÎncă nu există evaluări
- CCCCCCCCC CCCCCCCCCC CDocument10 paginiCCCCCCCCC CCCCCCCCCC C520012Încă nu există evaluări
- Haptics Seminar ReportDocument38 paginiHaptics Seminar Reportmonty083Încă nu există evaluări
- Haptics: The Technology of TouchDocument4 paginiHaptics: The Technology of TouchReggie GammadÎncă nu există evaluări
- Augmented RealityDocument28 paginiAugmented RealityBASBUSÎncă nu există evaluări
- Visual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionDe la EverandVisual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionÎncă nu există evaluări
- Some FactsDocument36 paginiSome Factsapi-281629019Încă nu există evaluări
- USA V Meng Letter DPADocument3 paginiUSA V Meng Letter DPAFile 411Încă nu există evaluări
- Chocolate Passion Fruit Layer CakeDocument3 paginiChocolate Passion Fruit Layer Cake4balanarÎncă nu există evaluări
- Theory of Design 2Document98 paginiTheory of Design 2Thirumeni MadavanÎncă nu există evaluări
- Chap5-7 National Book Foundation 9th Class Conceptual QuestionsDocument7 paginiChap5-7 National Book Foundation 9th Class Conceptual QuestionsWaleed Nasir100% (1)
- Vodafone Idea MergerDocument20 paginiVodafone Idea MergerCyvita Veigas100% (1)
- Tinniuts Today March 1990 Vol 15, No 1Document19 paginiTinniuts Today March 1990 Vol 15, No 1American Tinnitus AssociationÎncă nu există evaluări
- Metsec Steel Framing SystemDocument46 paginiMetsec Steel Framing Systemleonil7Încă nu există evaluări
- 1, Philippine ConstitutionDocument2 pagini1, Philippine ConstitutionJasmin KumarÎncă nu există evaluări
- BBC Focus - Answers To Lifes Big Questions 2017Document100 paginiBBC Focus - Answers To Lifes Big Questions 2017AD StrategoÎncă nu există evaluări
- Strategi Penatalaksanaan Stomatitis Aftosa RekurenDocument11 paginiStrategi Penatalaksanaan Stomatitis Aftosa RekurenPRADNJA SURYA PARAMITHAÎncă nu există evaluări
- Product Bulletin Fisher 8580 Rotary Valve en 123032Document16 paginiProduct Bulletin Fisher 8580 Rotary Valve en 123032Rachmat MaulanaÎncă nu există evaluări
- Closing Ceremony PresentationDocument79 paginiClosing Ceremony Presentationapi-335718710Încă nu există evaluări
- The Funny AlphabetDocument12 paginiThe Funny Alphabetmarianne_giulianoÎncă nu există evaluări
- Simple Future TenseDocument14 paginiSimple Future TenseYupiyupsÎncă nu există evaluări
- Grimshaw v. Ford Motor CoDocument35 paginiGrimshaw v. Ford Motor CozichenÎncă nu există evaluări
- Nursing Process Guide: St. Anthony's College Nursing DepartmentDocument10 paginiNursing Process Guide: St. Anthony's College Nursing DepartmentAngie MandeoyaÎncă nu există evaluări
- Estudio - Women Who Suffered Emotionally From Abortion - A Qualitative Synthesis of Their ExperiencesDocument6 paginiEstudio - Women Who Suffered Emotionally From Abortion - A Qualitative Synthesis of Their ExperiencesSharmely CárdenasÎncă nu există evaluări
- HTTP WWW - Aphref.aph - Gov.au House Committee Haa Overseasdoctors Subs Sub133Document3 paginiHTTP WWW - Aphref.aph - Gov.au House Committee Haa Overseasdoctors Subs Sub133hadia duraniÎncă nu există evaluări
- Docu69346 Unity Hybrid and Unity All Flash Configuring Converged Network Adaptor PortsDocument11 paginiDocu69346 Unity Hybrid and Unity All Flash Configuring Converged Network Adaptor PortsAmir Majzoub GhadiriÎncă nu există evaluări
- đề thi TADocument15 paginiđề thi TAĐào Nguyễn Duy TùngÎncă nu există evaluări
- Dragon Is The Fifth in The 12Document3 paginiDragon Is The Fifth in The 12Waylon CahiligÎncă nu există evaluări
- Igice Cya Kabiri: 2.0. Intambwe Zitandukanye Z'Imikorere Ya Mariyamu KinyamaruraDocument7 paginiIgice Cya Kabiri: 2.0. Intambwe Zitandukanye Z'Imikorere Ya Mariyamu KinyamaruraJacques Abimanikunda BarahirwaÎncă nu există evaluări
- Api 4G PDFDocument12 paginiApi 4G PDFAluosh AluoshÎncă nu există evaluări
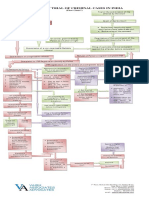
- Process of Trial of Criminal Cases in India (Flow Chart)Document1 paginăProcess of Trial of Criminal Cases in India (Flow Chart)Arun Hiro100% (1)
- Wp406 DSP Design ProductivityDocument14 paginiWp406 DSP Design ProductivityStar LiÎncă nu există evaluări
- 7 Types of English Adjectives That Every ESL Student Must KnowDocument3 pagini7 Types of English Adjectives That Every ESL Student Must KnowBenny James CloresÎncă nu există evaluări