Documente Academic
Documente Profesional
Documente Cultură
Desarrollo de Programa para Análisis de Maniobrabilidad de Configuraciones Vehiculares de Carretera Con Hasta Dos Unidades
Încărcat de
Carlos MachicadoTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Desarrollo de Programa para Análisis de Maniobrabilidad de Configuraciones Vehiculares de Carretera Con Hasta Dos Unidades
Încărcat de
Carlos MachicadoDrepturi de autor:
Formate disponibile
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Tema A3a Mecánica Teórica: Simulación numérica
“Desarrollo de programa para análisis de maniobrabilidad de configuraciones
vehiculares de carretera con hasta dos unidades”
Oscar Flores Centenoa*, Mauricio Eliseo Cruz Acevedob, Manuel de Jesus Fabela Gallegosa, Hugo
Martinez Paredesb, Jose Ricardo Hernández Jímeneza
a
Instituto Mexicano del Transporte, Carr. Estatal No. 431 “El Colorado-Galindo” km 12, Sanfandila, Pedro Escobedo 76703, Queretaro, México.
b
Universidad Politecnica de Chiapas, Carr. Tuxtla-Villaflores km 1+500, Las Brisas, Suchiapa 29150, Chiapas, México.
*oflores@imt.mx
RESUMEN
La maniobrabilidad de los vehículos de carretera es un parámetro de su desempeño que se refiere a los espacios que
requieren para poder llevar a cabo maniobras que impliquen virajes a baja velocidad, esta información es requerida al
momento de diseñar carreteras, trazos urbanos o zonas de maniobras. Existen programas de simulación disponibles
comercialmente capaces de realizar este tipo de análisis de forma rápida, sin embargo, para su uso se debe adquirir
una licencia lo que limita su uso. En este trabajo se presentan los resultados del desarrollo de un programa capaz de
llevar a cabo el análisis de la maniobrabilidad de vehículos unitarios y configuraciones con hasta un punto de
articulación. La validación del programa muestra un nivel de exactitud aceptable al haber diferencias menores al 5%
entre los resultados del programa y los obtenidos de forma experimental.
Palabras Clave: Maniobrabilidad, distancia entre ejes, área de barrido, radio de giro.
ABST RACT
The maneuverability of road vehicles is a parameter of their performance that refers to the spaces they require to be
able to carry out maneuvers that involve turns at low speed, this information is required when designing roads, urban
traces or maneuvering areas. There are commercially available simulation programs capable of performing this type of
analysis quickly, however, for its use a license must be acquired which limits its use. In this work the results of the
development of a program capable of carrying out the analysis of the maneuverability of unit vehicles and
configurations with up to a point of articulation are presented. The validation of the program shows an acceptable level
of accuracy as there are differences of less than 5% between the results of the program and those obtained
experimentally.
Keywords: Maneuverability, wheelbase, swept-path, turning radius.
seguir trayectorias a baja y alta velocidad. En ese sentido,
Introducción el desempeño a alta velocidad se conoce como
manejabilidad, mientras que para baja velocidad se
Uno de los aspectos que se deben cumplir con el fin de denomina maniobrabilidad.
lograr un adecuado tránsito por carreteras, es la
compatibilidad entre las características físicas y 1.1. Maniobrabilidad
geométricas de la infraestructura y las capacidades de los
vehículos que circulan por ella. Es por esto que desde la La maniobrabilidad se refiere a los espacios requeridos en
fase de diseño de las arterias viales y los trazados urbanos una maniobra, ejecutada normalmente a baja velocidad. De
se deben considerar las propiedades físicas y dimensiones modo que, la maniobrabilidad representa el desempeño en
relacionadas con los vehículos que se espera utilicen dicha situaciones de movimiento relativamente lento, como al
infraestructura, [1]. Entre las cuestiones a considerar están momento de girar en intersecciones o cruceros de calles, o
el comportamiento de las configuraciones vehiculares al
ISSN 2448-5551 MT 30 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
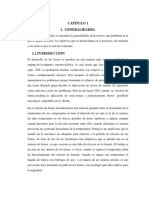
las acciones realizadas para el acomodo en un circunferencia. Generalmente esta prueba se realiza para el
estacionamiento o en zonas de carga y descarga, [2]. ángulo máximo de orientación de las llantas,
El desempeño de maniobrabilidad de un vehículo o determinándose de esta forma el radio mínimo de giro. En
configuración vehicular, es el resultado de la interacción de la Figura 2 se esquematiza el radio de giro medido con
sus dimensiones globales y el acomodo de sus ejes a lo respecto al centro del eje direccional.
largo de su longitud con las características de su
mecanismo de dirección, principalmente. Estableciéndose
de esta forma los espacios necesarios para que la
configuración vehicular pueda ejecutar una cierta maniobra
que implique un cambio de dirección para un ángulo
especifico de giro de orientación de las llantas del eje
direccional.
1.2. Evaluación de la maniobrabilidad
El análisis de la maniobrabilidad se puede realizar
mediante la determinación de diferentes parámetros, [3],
obtenidos comúnmente a través de pruebas a baja
velocidad, reduciendo de este modo los efectos inerciales
que se pudieran generar, entre estos parámetros los más
utilizados son: el área de barrido que corresponde al área
comprendida entre la trayectoria interna y externa de la
configuración vehicular al desplazarse con un ángulo de
orientación de las llantas direccionales fijo generando así
una trayectoria curva, ver Figura 1. Esta medida adquiere
gran importancia principalmente para configuraciones
compuestas por más de una unidad, ya que las áreas para
este tipo de vehículos se incrementan y se puede producir Figura 2 – Representación del radio de giro.
la invasión de carriles adyacentes.
1.3. Programas comerciales para análisis de la
maniobrabilidad
Para llevar a cabo los estudios de maniobrabilidad, los
diseñadores de carreteras y de urbanización, así como los
diseñadores de vehículos y encargados de logística de
empresas de transporte, recurren generalmente al uso de
programas de simulación numérica, debido a que de esta
forma obtienen los parámetros que requieren más
rápidamente y a un menor costo que si lo hicieran de forma
experimental con vehículos reales.
En el mercado se encuentran disponibles diversos
programas comerciales de simulación que permiten realizar
el análisis de maniobrabilidad para los diferentes tipos de
vehículos, entre los que se pueden mencionar los
siguientes:
TruckSIMÒ
Este es un programa muy completo que permite simular el
desempeño de configuraciones vehiculares
Figura 1 – Representación del área de barrido.
multiarticuladas, considerando las características y
propiedades de los principales componentes de los
El radio de giro, es otro parámetro muy utilizado para
vehículos, siendo posible representar gran variedad de
describir las características de maniobrabilidad de un
vehículo. Esté se refiere al radio de la circunferencia maniobras tanto a alta como baja velocidad, obteniendo la
descrita por el vehículo, para un ángulo de orientación fijo repuesta de la configuración mediante el historial en el
de las llantas del eje direccional, desde el centro de tiempo de las variables cinemáticas y dinámicas, [4].
rotación hasta la parte más interna del vehículo en dicha
ISSN 2448-5551 MT 31 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
HVE 2. Desarrollo del modelo de maniobrabilidad
El HVE, al igual que el programa anterior, tiene la Para que un vehículo de carretera pueda cambiar de
capacidad de evaluar el desempeño de vehículos, trayectoria, es necesario que cuente con al menos un eje
complementado con el análisis durante eventos de choque direccional, comúnmente el primer eje, en el cual las
entre vehículos o vehículo con mobiliario carretero, llantas tienen libertad para girar en un cierto intervalo con
incluyendo el efecto sobre los ocupantes de los vehículos o respecto a su eje vertical. Cuando un vehículo vira, el giro
incluso peatones, [5]. se produce con respecto a centros instantáneos de rotación,
si el ángulo de orientación de las llantas del eje direccional
Auto TURNÒ es constante, entonces el punto de rotación también los es.
En la Figura 3 se observa el esquema de un vehículo de dos
Es un programa especializado para la simulación del ejes que gira con respecto al punto C, [2].
comportamiento de vehículos durante maniobras que
implican el giro del volante direccional, permitiendo así el
análisis de las áreas de barrido. Es decir, este programa está
enfocado al análisis de la maniobrabilidad de vehículos,
requiriendo como datos de entrada del vehículo a analizar
sus dimensiones principales y la ubicación de los ejes. El
Auto TURNÒ está basado en CAD y promete ahorrar
tiempo, permitiendo analizar y evaluar las maniobras de los
vehículos para proyectos como intersecciones, rotondas,
terminales de autobuses, muelles de carga o cualquier obra
dentro o fuera de la vía pública que implique
maniobrabilidad, espacio libre y acceso, [6].
Existen algunos otros programas capaces de realizar este
tipo de análisis, aunque los mencionados aquí son de los
más conocidos y utilizados a nivel mundial. Estas
herramientas, como se menciona, son de gran utilidad
debido al ahorro en tiempo y por tanto de recursos a la hora Figure 3 – Representación del centro de rotación de un vehículo.
de llevar a cabo estudios de maniobrabilidad. Sin embargo,
su principal inconveniente es que al ser programas Para que un vehículo pueda girar libremente, es decir,
comerciales, es necesario contar con licencias para su sin arrastre lateral de las llantas, se debe cumplir con el
utilización, las cuales, generalmente tienen altos costos, principio de Ackerman, para lo cual los ángulos de
limitando así su uso solo para quien pueda pagar para orientación de las llantas del eje direccional (de y di) deben
contar con la licencia. ser diferentes, de forma que se cumpla la siguiente
Por lo anterior, es importante desarrollar herramientas relación, [2], donde T es la entrevía y L la distancia entre
de análisis que permitan llevar a cabo estudios de ejes.
maniobrabilidad de forma sencilla y rápida con resultados
que presenten un adecuado nivel de precisión y que
T
impliquen menores costos, logrando además reducir con la cot de - cot di = (1)
dependencia científica y tecnológica del país en cuanto al L
uso de programas comerciales, ya que estos son
desarrollados en otros países.
Como se observa, el comportamiento de
De esta forma, en este trabajo se presentan los
maniobrabilidad se puede realizar, bajo ciertas
resultados obtenidos del desarrollo de un programa para el
suposiciones, mediante el análisis de modelos geométricos.
análisis de la maniobrabilidad de vehículos unitarios y
configuraciones vehiculares con hasta una articulación, en
2.1. Modelo para vehículos unitarios
esta primera etapa. Para esto, se estableció en primer lugar
el modelo matemático, haciendo posteriormente la
El modelo bicicleta permite realizar el análisis de
programación utilizando LabVIEW. Para la validación se
maniobrabilidad de forma simplificada con respecto a un
realizaron pruebas experimentales utilizando un autobús de
centro de rotación C, a partir de un ángulo de orientación
tres ejes, obteniéndose de esta forma una gran
de la llanta del eje direccional y la distancia longitudinal
aproximación entre los resultados arrojados por el
entre ejes (L). Este modelo consiste en suponer una sola
programa y los registrados en las pruebas con el vehículo
llanta por eje situada al centro del mismo, considerando así
real, con diferencias de apenas centímetros.
que el vehículo no cuenta con espesor, [2]. En la Figura 4
ISSN 2448-5551 MT 32 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
se observa el modelo bicicleta de un vehículo unitario de
dos ejes.
Del análisis del modelo aplicando trigonometría se
pueden determinar las relaciones para obtener las
trayectorias de las llantas delantera y trasera a partir de los
radios de giro con respecto al punto C, es decir, rd y rt,
como se observa en la Ecuación 2.
L L
rd = ; rt = (2)
send tan d
Figure 5 – Modelo vehículo unitario.
æ L + VD ö
ri = tan -1 çç ÷÷ (3)
è rt + AN 2 ø
Figure 4 – Modelo bicicleta. re = (rt + AN 2)2 + (L + VD )2 (4)
A partir de este análisis se puede extender para
considerar el ancho del vehículo y determinar el área de 2.2. Modelo para vehículos con un punto de articulación
barrido que se obtiene a partir del radio interno (ri), que
corresponde, como se ilustró en la Figura 1, a la parte de la Es posible añadir unidades adicionales, unidos mediante
carrocería que está justo en el eje trasero, y del radio puntos de articulación, en el modelo bicicleta y de esta
externo (re) descrito por la esquina exterior delantera del forma establecer las trayectoria durante una trayectoria
vehículo. Para estos es necesario conocer dichas curva para las diferentes partes de interés del vehículo. En
dimensiones del vehículo. En la Figura 5 se muestra el la Figura 6 se ilustra el modelo bicicleta para un vehículo
modelo de vehículo unitario, donde VT es el volado con un punto de articulación. La distancia R se mide a
trasero, es decir la distancia del eje trasero hasta el extremo partir del punto de articulación hasta el eje de la unidad o
trasero de la carrocería del vehículo, VD el volado del centro de los ejes si hubiera más de uno.
delantero y AN el ancho total.
Del análisis trigonométrico del modelo mostrado en la
Figura 5 y con base en el desarrollo del modelo bicicleta se
obtienen las Ecuaciones 3 y 4 para determinar los radios
interno y externo para un ángulo de orientación de las
llantas del eje direccional dado.
Figure 6 – Modelo bicicleta con un punto de articulación.
ISSN 2448-5551 MT 33 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Para obtener el área de barrido para configuraciones con
un punto de articulación se siguió el mismo procedimiento
que para vehículos unitarios, se hizo la extensión del
modelo bicicleta para considerar las dimensiones de las
unidades y trigonométricamente se determinaron las
ecuaciones que proporcionan los radios interno y externo
que determinan el área total de barrido, cabe señalar que
para este caso el radio interno es el radio de la trayectoria
seguida por el punto más interno de la unidad de arrastre.
Complementariamente, el modelo analizado contempla
que el punto de articulación, que generalmente consiste en
un enganche del tipo quinta rueda, coincida o no con el
punto donde se mide la distancia L. Este es un punto a
resaltar, ya que el programa AutoTurn, que es el más
utilizado a nivel mundial para realizar este tipo de análisis,
solo considera que la quinta rueda coincide con el centro
del tándem, sin embargo en la realidad esto no siempre se Figure 7 – Ventana de inicio.
cumple, produciéndose por este aspecto diferencias en el
comportamiento del vehículo. Por cuestiones de espacio, Si la opción elegida corresponde a vehículo ligero, en la
no se describe a detalle las expresiones determinadas para siguiente ventana se tienen algunas alternativas de
el análisis de este tipo de configuraciones vehiculares. vehículos ligeros a elegir, siendo todos ellos de dos ejes.
Posteriormente se deben introducir las principales
dimensiones del vehículo, en la pantalla se acompaña de
una imagen ilustrativa de las dimensiones requeridas con el
3. Programa fin de que el usuario las identifique con mayor facilidad.
También, es necesario proporcionar el ángulo de giro de las
Una vez establecidas las ecuaciones para analizar tanto llantas que se desea evaluar. En la Figura 8 se aprecia esta
vehículos unitarios como configuraciones con hasta dos pantalla.
unidades, se procedió a realizar un programa para la
solución de las mismas, bajo la premisa de lograr un
programa con una interfaz completamente gráfica, que
resulte amigable y fácil de utilizar para cualquier usuario y
que contemple tanto vehículos ligeros como todas las
configuraciones de vehículos de carga pesada estipulados
en la Norma NOM-012-SCT-2-2014, [6].
Para cumplir con lo anterior, se eligió desarrollar el
programa utilizando LabVIEW, debido básicamente a la
experiencia previa en el uso de este programa y a sus
capacidades para realizar de forma simple representaciones
gráficas. Este programa permite llevar a cabo la
programación en forma de diagrama de bloques, [7].
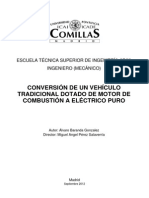
El programa desarrollado consta de una secuencia de
pantallas donde se le va solicitando la información
requerida al usuario para llevar a cabo el análisis. En la
Figura 7 se muestra una imagen de la pantalla de inicio del
programa, en la cual se puede elegir el tipo de vehículo a
analizar, teniendo las opciones de vehículo ligero o
vehículo pesado, una vez seleccionado se puede proceder a Figure 8 – Ventana para vehículos ligeros.
la siguiente ventana, también incluye un botón para salir
del programa si se desea. Esta pantalla también incluye botones para seguir
adelante, regresar a la pantalla anterior o ir a una ventana
de ayuda donde se especifica a mayor detalle cada uno de
los datos solicitados.
Si por el contrario, la opción elegida es vehículo pesado,
debido a la amplia diversidad de configuraciones existentes
de este tipo de vehículos, el programa cuenta con diferentes
ISSN 2448-5551 MT 34 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
alternativas a elegir, que va de vehículos unitarios de dos y
tres ejes, C2 y C3 de acuerdo la clasificación establecida en
la NOM-012-SCT-2-2014, autobuses de dos, tres y cuatro 4. Validación del programa
ejes (B2, B3, y B4) y configuraciones formadas por
tractocamiones de dos y tres ejes (T2 y T3) y Cuando se lleva a cabo la simulación del algún fenómeno
semirremolques de uno, dos y tres ejes (S1, S2 y S3). En la mediante un modelo numérico, es importante que dicho
Figura 9 se observa la pantalla para el caso de un autobús modelo este validado para tener la certeza de que los
B2 y se indica las dimensiones requeridas para el análisis. resultados que arroje sean cercanos al fenómeno real. En
ese sentido, para validar los resultados proporcionados por
el programa desarrollado se realizaron pruebas a escala real
para determinar la maniobrabilidad, con diferentes ángulos
de giro en las llantas del eje direccional, de dos autobuses,
uno con dos ejes y otro con tres.
4.1. Vehículos de prueba
Como se menciona los vehículos utilizados para validar el
programa fueron dos, antes de realizar las pruebas en
campo se midieron y registraron las principales
características de cada uno de ellos que intervienen en la
maniobrabilidad, como son, sus dimensiones y la relación
del sistema de dirección entre el volante y las llantas
direccionales. Para el autobús con dos ejes, se midieron las
siguientes dimensiones: largo total de 12.80 m, volado
delantero de 2.67 m, distancia entre ejes de 7.54 m,
Figure 9 – Ventana para vehículos pesados. entrevía delantera de 2.16 m y la entrevía trasera de 1.84,
ancho total de la carrocería de 2.60 m y una relación del
Una vez que se han introducido los datos necesarios y sistema de dirección de 22:1, es decir, que por cada 22
se selecciona la opción siguiente, el programa realiza el grados de giro en el volante las llantas giran 1 grado. En la
análisis y despliega otra pantalla con los resultados Figura 11 se muestra una imagen del autobús de dos ejes y
obtenidos, en cuanto a los radios interno y externo y si se un esquema donde se indican sus principales dimensiones.
proporciona la relación de giro del mecanismo de dirección
el programa arroja el ángulo que gira el volante de
dirección para el ángulo de giro de las llantas dado.
Además, se genera una animación del vehículo siguiendo
la trayectoria descrita, así como, producir un reporte en un
archivo de hoja de cálculo de estos resultados. Una imagen
de la vista de la pantalla de resultados se puede observar en
la Figura 10.
Figure 10 – Ventana de resultados. Figure 11 – Autobús de dos ejes.
ISSN 2448-5551 MT 35 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
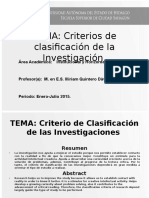
Para el caso del autobús con tres ejes, se midieron las
siguientes dimensiones: largo total de 14.80 m, volado
delantero de 2.75 m, distancia entre el primer eje y el
segundo de 7.42 m, distancia entre el segundo eje y el
tercero de 1,46 m, entrevía delantera de 2.16 m y la
entrevía trasera de 1.87, ancho total de la carrocería de 2.54
m y una relación del sistema de dirección de 22:1, igual
que en el otro autobús. En la Figura 12 se muestra una
imagen del autobús de tres ejes.
Figure 13 – Ejecución de pruebas.
Figure 12 – Autobús de tres ejes.
4.2. Ejecución de pruebas
5. Resultados
Las pruebas consistieron en ubicar los autobuses en una
superficie plana donde pudieran desplazarse libremente, Una vez concluidas las pruebas experimentales y
girar el volante hasta un punto específico manteniéndolo procesado los resultados, se procedió a llevar a cabo las
fijo y desplazar el vehículo a baja velocidad (por debajo de pruebas en el programa, introduciendo las dimensiones de
5 km/h) para describir una trayectoria circular y los vehículos de pruebas y los giros de las llantas evaluados
posteriormente poder medir los ángulos internos y externos durante las pruebas en campo y los resultados obtenidos de
descritos por el vehículo para poder establecer el área de ambos métodos se compararon para determinar las
barrido. diferencias existentes.
Las pruebas se realizaron para tres condiciones de giro A continuación se presentan las comparativas de los
del volante en ambos sentidos (derecha e izquierda), estas resultados para cada vehículo, así como las diferencias
condiciones fueron: ángulo máximo de giro de la dirección, existentes entre sí. Se comienza en la Tabla 1 donde se
dos vueltas completas en el volante (720°) y una y media muestran los resultados para el autobús de tres ejes en
vueltas (540°). En la Figura 13 se observan imágenes cuanto a los radios interno y externo, para cada giro en el
durante la realización de las pruebas para ambos vehículos volante probado y en cada sentido de giro, se observa que
utilizados. los valores registrados en las pruebas de campo y los
arrojados por el programa son muy cercanos, con
diferencias de centímetros.
Tabla 1 – Comparativa de los radios internos y externos obtenidos de
forma experimental y con el programa para el autobús B3.
Sentido Giro del Giro de las Experimental Programa
de giro volante [°] llantas [°]
ri[m] re[m] ri[m] re[m]
1080 47.9 6.29 13.98 6.26 13.81
Izquierda
720 32.6 11.31 17.56 11.64 17.71
1080 47.0 6.56 14.15 6.53 14.04
Derecha 720 32.4 11.66 17.84 11.76 17.80
540 24.5 16.7 22.04 16.76 21.97
ISSN 2448-5551 MT 36 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
En la Tabla 2 se presentan las diferencias entre ambos Tabla 4 – Diferencias obtenidas para el autobús B2.
resultados, se observa que la diferencia menor es de 3 cm y Sentido Giro del Giro de las Diferencia [m] Diferencia [%]
una diferencia máxima de 33 cm lo que representa en de giro volante [°] llantas [°]
porcentaje el 0.48 y el 2.92 % respectivamente.
1080 47.9 -0.18 0.01 -3.09 0.08
Tabla 2 – Diferencias obtenidas para el autobús B3. Izquierda 720 32.6 -0.22 -0.02 -2.10 -0.12
Sentido Giro del Giro de las Diferencia [m] Diferencia [%] 540 24.5 -0.66 -0.39 -4.46 -1.95
de giro volante [°] llantas [°]
1080 47.0 -0.12 0.06 -2.06 0.45
1080 47.9 0.03 0.17 0.48 1.22 Derecha 720 32.4 0.05 0.19 0.47 1.14
Izquierda
720 32.6 -0.33 -0.15 -2.92 -0.85 540 24.5 -0.27 -0.12 -1.79 -0.59
1080 47.0 0.03 0.11 0.46 0.78
Derecha 720 32.4 -0.1 0.04 -0.86 0.22 6. Conclusiones
540 24.5 -0.06 0.07 -0.36 0.32
La maniobrabilidad de los vehículos de carretera es un
Para el caso del autobús de dos ejes, los resultados se
parámetro importante cuando se diseñan carreteras o trazos
muestran en la Tabla 3, de igual forma, estos datos
urbanos, así como lugares de maniobras, por lo que es
corresponden a la comparativa para el radio interno y el
importante poder obtener información al respecto, para
externo.
diferentes tipos de vehículos, de forma rápida y precisa,
Tabla 3 – Comparativa de los radios internos y externos obtenidos de
por lo que los programas de simulación constituyen una
forma experimental y con el programa para el autobús B2. herramienta valiosa.
Existen programas comerciales en los cuales se pueden
Sentido Giro del Giro de las Experimental Programa
de giro volante [°] llantas [°]
llevar a cabo análisis de maniobrabilidad, sin embargo su
ri[m] re[m] ri[m] re[m] uso está condicionado a la adquisición de licencias
1080 46.8 5.82 13.18 6 13.17 costosas, siendo está una diferencia con el programa aquí
Izquierda 720 32.6 10.48 16.53 10.7 16.55
presentado. Otra diferencia, como se mencionó, es que el
programa incluye la posibilidad de que el punto de
540 24.5 14.8 20.11 15.46 20.50
articulación (quinta rueda) coincida o no con el centro
1080 47.0 5.83 13.19 5.95 13.13 longitudinal del tándem de vehículo motriz, esta es una
Derecha 720 32.9 10.61 16.64 10.56 16.45 particularidad que el programa AutoTurn no considera.
540 24.6 15.09 20.36 15.36 20.48
El programa demostró un desempeño prometedor
presentando diferencias marginales al comparar sus
Las diferencias existentes se muestran en la Tabla 4, es de resultados con los obtenidos de forma experimental, con
notar que la mayoría son diferencias negativas, esto indica diferencias que siempre estuvieron por debajo del 5%.
que la distancia generada por el programa es menor que la A partir de los radios interno y externo generados por el
registrada durante las pruebas experimentales, aunque de programa es posible establecer los espacios requeridos para
nueva cuenta las diferencias son pequeñas con una mínima que los vehículos puedan llevar cabo alguna maniobra en
de 1 cm correspondiente al 0.08% y una diferencia máxima específico, o a la inversa, a partir de un espacio dado, como
de 66 cm o 4.46 %. puede ser alguna intersección o cruce con características
El área de barrido, como se mencionó, está comprendida bien definidas, establecer si un vehículo puede circular por
por los radios interno y externo descritos por un vehículo al él, si habrá invasión de carriles o no. Esta información será
momento de realizar una maniobra con cambio de de utilidad para proyectistas, encargados logísticos y
dirección, por lo que a partir de los datos mostrados en las autoridades responsables de regular el transito vehicular.
Tablas 1 y 3 es posible establecer las áreas de barrido para Para futuras etapas se buscará extender los modelos y el
cada caso de prueba. programa desarrollado para abarcar mayor cantidad de
La ligera desviación presentada entre los datos configuraciones vehiculares, tal es el caso de las
experimentales y los arrojados por el programa para las doblemente articuladas. Además de la realización de mayor
pruebas generales ejecutadas, da la certeza de que el cantidad de pruebas de validación considerando aspectos
programa puede ser utilizado para propósitos específicos como la distribución de la carga en los vehículos. Otro
de evaluación, como puede ser el determinar si en algún aspecto a mejorar será la interface visual, y la posible
espacio especifico un vehículo tendrá el espacio necesario interacción con programas utilizados para la elaboración de
para hacer alguna maniobra de viraje, si invadirá carriles planos, como por ejemplo programas de CAD, para que sea
adyacentes o algún otro espacio que no pertenezca al área más fácil y rápido el análisis al poder comprar los
de transito establecida resultados del programa con los planos del espacio que se
desea evaluar.
ISSN 2448-5551 MT 37 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM
20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Agradecimientos [4] TruckSim Quick Start Guide, “User´s Manual,
Mechanical Simulation Corporation, December 2009,
Se agradece el apoyo proporcionado por la empresa USA
[5] HVE, “User´s Manual”, EDC, Oregon, USA, 2006.
IRIZAR de México al proporcionar los vehículos y [6] Norma Oficial Mexicana NOM-012-SCT-2-2014,
operadores para la realización de las pruebas de validación. Sobre el peso y dimensiones máximas con las que
pueden circular los vehículos de autotransporte que
transitan en las vías generales de comunicación de
REFERENCIAS jurisdicción federal”. DIARIO OFICIAL. Viernes 14 de
noviembre de 2014. México, D. F.
[7] LabVIEW7 Express, User´s Manual, National
Instruments Corporation, April 2003, USA
[1] AASHTO, A Policy on Geometric Design of Highways
and Streets, 6th Edition, USA 2011 ISBN: 978-1-56051-
508-1
[2] Fabela Gallegos M.J., Aspectos básicos aplicables a la
evaluación de la maniobrabilidad de vehículos de
carretera, Boletín Notas Instituto Mexicano del
Transporte, marzo-abril 2013, México.
[3] Tyler, G., et. al, Evaluating the Manoeuvrability of
Theoretical Tractor-Trailer Combinations and Extended
Trailer Configurations on Winnipeg Truck Routes,
presented at Conference of the Transportation
Association of Canada Montreal, Quebec, 2014.
ISSN 2448-5551 MT 38 Derechos Reservados © 2017, SOMIM
S-ar putea să vă placă și
- Capitulo 1 RevDocument9 paginiCapitulo 1 RevCarlos MachicadoÎncă nu există evaluări
- Manual Vehiculo ElectricoDocument276 paginiManual Vehiculo Electriconnica100% (3)
- Componentes de Una Transmision AutomaticaDocument8 paginiComponentes de Una Transmision AutomaticaCarlos MachicadoÎncă nu există evaluări
- Mod de Prestamos Sin InteresesDocument1 paginăMod de Prestamos Sin InteresesAnonymous JzYVCRQ0% (1)
- VibracionesDocument18 paginiVibracionesAlex NavaÎncă nu există evaluări
- 50Document2 pagini50Carlos MachicadoÎncă nu există evaluări
- Proforma 9371Document2 paginiProforma 9371Carlos MachicadoÎncă nu există evaluări
- Análisis de Vibraciones en MCIDocument17 paginiAnálisis de Vibraciones en MCIEdgardo Carrillo NavarroÎncă nu există evaluări
- Métodos y TécnicasDocument120 paginiMétodos y TécnicasAntonioHuamanQuintoÎncă nu există evaluări
- 65T00138 (1) DesbloqueadoDocument130 pagini65T00138 (1) Desbloqueadojonatan rodriguezÎncă nu există evaluări
- Sistemas de Encendido TiposDocument23 paginiSistemas de Encendido TiposYsidro Neyra100% (1)
- Oscilaciones Parte2 2012 PDFDocument18 paginiOscilaciones Parte2 2012 PDFCarlos MachicadoÎncă nu există evaluări
- Oscilaciones Parte2 2012Document2 paginiOscilaciones Parte2 2012Carlos MachicadoÎncă nu există evaluări
- RT v4n8Document42 paginiRT v4n8Angel SamaniegoÎncă nu există evaluări
- SedesDocument4 paginiSedesCarlos MachicadoÎncă nu există evaluări
- RT v4n8Document42 paginiRT v4n8Angel SamaniegoÎncă nu există evaluări
- 3 MetodosDocument2 pagini3 MetodosCarlos MachicadoÎncă nu există evaluări
- 3 MetodosDocument2 pagini3 MetodosCarlos MachicadoÎncă nu există evaluări
- SedesDocument2 paginiSedesCarlos MachicadoÎncă nu există evaluări
- Planteamiento Del ProblemaDocument25 paginiPlanteamiento Del ProblemaCarlos MachicadoÎncă nu există evaluări
- Bugggu EspecificadoDocument90 paginiBugggu EspecificadoAugusto AnshaÎncă nu există evaluări
- 1 StandardReport12Document7 pagini1 StandardReport12Carlos MachicadoÎncă nu există evaluări
- SedesDocument2 paginiSedesCarlos MachicadoÎncă nu există evaluări
- Libro 1Document4 paginiLibro 1Carlos MachicadoÎncă nu există evaluări
- Simbologia Neumtica e HidrulicaDocument10 paginiSimbologia Neumtica e HidrulicanoeliamoralvÎncă nu există evaluări
- 2 MetodologiaDocument46 pagini2 MetodologiaCarlos MachicadoÎncă nu există evaluări
- 2 MetodologiaDocument19 pagini2 MetodologiaFranko Miguel SoteloÎncă nu există evaluări
- Normas ApaDocument22 paginiNormas ApaFaviomisÎncă nu există evaluări
- Proforma EdmmeDocument6 paginiProforma EdmmeCarlos MachicadoÎncă nu există evaluări
- 2 Mapa EstratégicoDocument8 pagini2 Mapa EstratégicoJessy MayorgaÎncă nu există evaluări
- EVALUACIONES m8Document37 paginiEVALUACIONES m8danny alejandro carrillo longas100% (6)
- Bases Filosóficas de La Ciencia Semana 4 PDocument8 paginiBases Filosóficas de La Ciencia Semana 4 Pana griselda atkinsonÎncă nu există evaluări
- Tartaletas 3°okDocument6 paginiTartaletas 3°okJanira ZuñigaÎncă nu există evaluări
- Producto 1. Desarrollo HumanoDocument7 paginiProducto 1. Desarrollo HumanoMILDRED SANTAMARIAÎncă nu există evaluări
- Formación Profesional Dual: Servicio Nacional de Adiestramiento en Trabajo IndustrialDocument18 paginiFormación Profesional Dual: Servicio Nacional de Adiestramiento en Trabajo Industrialoscar edilson pelaez rodriguezÎncă nu există evaluări
- Días Internacionales y Mundiales de OctubreDocument14 paginiDías Internacionales y Mundiales de OctubreDorella Valdivia Pons100% (1)
- Actividad 3. Diseño de Puestos de TrabajoDocument6 paginiActividad 3. Diseño de Puestos de TrabajoMarcos Nel Tuiran AlvarezÎncă nu există evaluări
- Bomba Doll SprintDocument6 paginiBomba Doll SprintFerdinand Raul StoneÎncă nu există evaluări
- Sesión 2do Simulacro-1Document7 paginiSesión 2do Simulacro-1janiraÎncă nu există evaluări
- 01 3 Aisladores MTDocument30 pagini01 3 Aisladores MTGustavo CasabonaÎncă nu există evaluări
- Actividad C. SOCIALES 1103Document2 paginiActividad C. SOCIALES 1103Johanna MorenoÎncă nu există evaluări
- Memoria SCM2017Document71 paginiMemoria SCM2017cristian villegasÎncă nu există evaluări
- Diodos y TransistoresDocument154 paginiDiodos y TransistoresSantos Muñoz EleazarÎncă nu există evaluări
- Electrotecnia GeneralDocument3 paginiElectrotecnia GeneralFranco MendozaÎncă nu există evaluări
- Semana 12 Integral de FourierDocument15 paginiSemana 12 Integral de FourierJose Antonio Guzman LopezÎncă nu există evaluări
- Receta de Galletas Fáciles y RápidasDocument107 paginiReceta de Galletas Fáciles y RápidascarlosyonÎncă nu există evaluări
- Cuentos SufiDocument4 paginiCuentos SufiAnahi ZabalaÎncă nu există evaluări
- Brenner - Robert. Prefacio e Introducción. El Debate BrennerDocument8 paginiBrenner - Robert. Prefacio e Introducción. El Debate BrennerFernanda LeónÎncă nu există evaluări
- EXAMEN DICIEMBRE PCE - SolucionesDocument6 paginiEXAMEN DICIEMBRE PCE - SolucionesAdriana D'AmicoÎncă nu există evaluări
- SVB Glosario D Terminos.Document10 paginiSVB Glosario D Terminos.Yhoelvis GonzalezÎncă nu există evaluări
- Informe de Introduccion A La FisioterapiaDocument3 paginiInforme de Introduccion A La FisioterapiaAlondraÎncă nu există evaluări
- Despiece Still Citi One (Transpaleta Manual-ElectricaDocument31 paginiDespiece Still Citi One (Transpaleta Manual-ElectricaSARAMQRÎncă nu există evaluări
- Taller 1 - La Célula 2020BDocument3 paginiTaller 1 - La Célula 2020BJuan David ValenciaÎncă nu există evaluări
- Recensión Derecho MarítimoDocument10 paginiRecensión Derecho MarítimoAnonymous ziOgWkyÎncă nu există evaluări
- Audios Antiguos MonroeDocument2 paginiAudios Antiguos MonroeMario CalvoÎncă nu există evaluări
- Plantas Prohibidas o Restringidas Por Su ToxicidadDocument51 paginiPlantas Prohibidas o Restringidas Por Su ToxicidadMaria Eugenia MartiÎncă nu există evaluări
- Pinedo Arevalo Miguel Muros Suelo ReforzadoDocument106 paginiPinedo Arevalo Miguel Muros Suelo ReforzadoHebert Rodríguez SantiagoÎncă nu există evaluări
- Poster de Cancer OralDocument1 paginăPoster de Cancer OralNoemi Cabrera OrtizÎncă nu există evaluări