S-ar putea să vă placă și
- Introduction To Flight PDFDocument636 paginiIntroduction To Flight PDFMohammadhossein Nirooei94% (18)
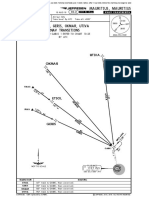
- Mauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsDocument36 paginiMauritius, Mauritius Fimp/Mru: Etsol, Geris, Okmar, Utiva Rnav TransitionsTweed3A100% (3)
- TestModuleA AnsDocument11 paginiTestModuleA AnsMateus Pedro100% (2)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsDe la EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsÎncă nu există evaluări
- Airbus Aircraft PerformanceDocument216 paginiAirbus Aircraft Performancecaptvinicius100% (21)
- Airbus Aircraft PerformanceDocument216 paginiAirbus Aircraft Performancecaptvinicius100% (21)
- B777 Polar Operations - Recurrent Final PDFDocument26 paginiB777 Polar Operations - Recurrent Final PDFPatrick van Rutten100% (2)
- Complex Aerodynamic Behavior of High Spin APFSDS ProjectileDocument7 paginiComplex Aerodynamic Behavior of High Spin APFSDS ProjectileNektarios PapantoniouÎncă nu există evaluări
- Example - Square Footing Case1Document9 paginiExample - Square Footing Case1Bryle Steven Newton100% (2)
- AE1222-II Formula Sheet Aircraft Design Version 25-3-2021Document4 paginiAE1222-II Formula Sheet Aircraft Design Version 25-3-2021daniel dusÎncă nu există evaluări
- Aero Q406Document32 paginiAero Q406Antony BalabanÎncă nu există evaluări
- Aero Q406Document32 paginiAero Q406Antony BalabanÎncă nu există evaluări
- Longitudinal Stick-Fixed Static Stability and Control TopicsDocument12 paginiLongitudinal Stick-Fixed Static Stability and Control Topicssameh hassanÎncă nu există evaluări
- PDF 13Document2 paginiPDF 13Ercan Umut DanışanÎncă nu există evaluări
- Spacecraft and Aircraft Dynamics: Matthew M. PeetDocument32 paginiSpacecraft and Aircraft Dynamics: Matthew M. Peetaadhya guptaÎncă nu există evaluări
- This Study Resource Was: Summary of Lecture 4Document2 paginiThis Study Resource Was: Summary of Lecture 4Ercan Umut DanışanÎncă nu există evaluări
- 02 045 FDSDocument8 pagini02 045 FDSJaveria NaseemÎncă nu există evaluări
- Aero Static Stab 2 2017Document12 paginiAero Static Stab 2 2017VigneshVickeyÎncă nu există evaluări
- Johnson, Brian - ABET AssignmentDocument7 paginiJohnson, Brian - ABET AssignmentBrian JohnsonÎncă nu există evaluări
- Indrumator Metal - EGDocument37 paginiIndrumator Metal - EGhooky1100% (1)
- Assignment 02Document6 paginiAssignment 02Javeria NaseemÎncă nu există evaluări
- Overhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Document2 paginiOverhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Héctor VargasÎncă nu există evaluări
- Overhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Document2 paginiOverhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Héctor VargasÎncă nu există evaluări
- Stern Tube NewDocument1.154 paginiStern Tube NewMuchammatAlvinurÎncă nu există evaluări
- Aircraft Performance TulapurkaraDocument6 paginiAircraft Performance TulapurkaraKISHORKUMAR UKIRDEÎncă nu există evaluări
- Static Stability - Wing Contribution, Tail Contribution and Static MarginDocument6 paginiStatic Stability - Wing Contribution, Tail Contribution and Static MarginRaja PatelÎncă nu există evaluări
- 012 - Chapter 2 - L10Document12 pagini012 - Chapter 2 - L10nanduslns07Încă nu există evaluări
- Additional Question AE 305 717 Tutorial 3 SolutionDocument3 paginiAdditional Question AE 305 717 Tutorial 3 SolutionHIMANSHU VERMAÎncă nu există evaluări
- Overhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Document2 paginiOverhead Contact System Steady State Ampacity Calculations Per AREMA Manual Chapter 33 and IEEE Std. 738Héctor VargasÎncă nu există evaluări
- Tutorial 3 - SolutionDocument5 paginiTutorial 3 - SolutionHIMANSHU VERMAÎncă nu există evaluări
- حلول كتاب الهيت للدكتور عباس عليويDocument100 paginiحلول كتاب الهيت للدكتور عباس عليوينزار الدهاميÎncă nu există evaluări
- RRDPAE 2008 Presentation ATR72Document28 paginiRRDPAE 2008 Presentation ATR72Eduardo SawasakiÎncă nu există evaluări
- Final Exam Solutions 2009-2010Document9 paginiFinal Exam Solutions 2009-2010engnavaljoaoÎncă nu există evaluări
- 1 PDFDocument9 pagini1 PDFalihasan12Încă nu există evaluări
- L2 - Static Aeroelasticity of 2D Wing SegmentDocument23 paginiL2 - Static Aeroelasticity of 2D Wing SegmentAbaziz Mousa OutlawZzÎncă nu există evaluări
- Cố-lên DA kttc2 TrọngDocument42 paginiCố-lên DA kttc2 TrọngKhoa PhanÎncă nu există evaluări
- Aircraft Performance Lesson Final Homework: Solutions A-) For Calculate Minimum Glide Path Angle, We Need The Max L/DDocument6 paginiAircraft Performance Lesson Final Homework: Solutions A-) For Calculate Minimum Glide Path Angle, We Need The Max L/DEmine YıldızÎncă nu există evaluări
- CONCLUSIONDocument16 paginiCONCLUSIONlado prakasaÎncă nu există evaluări
- Ship DynamicsDocument10 paginiShip DynamicsAlejandro Monar D.Încă nu există evaluări
- Lab Exp3Document12 paginiLab Exp3MOHIT MALL URK19ME1044Încă nu există evaluări
- Siklus OttoDocument2 paginiSiklus Ottomuhammadalamin131203Încă nu există evaluări
- 017 - Chapter 3 - L13Document6 pagini017 - Chapter 3 - L13nanduslns07Încă nu există evaluări
- Exercises Lecture 3 - Answers: Climbing and Descending FlightDocument9 paginiExercises Lecture 3 - Answers: Climbing and Descending FlightBaptisteÎncă nu există evaluări
- Meinnen Holltrop MethodDocument17 paginiMeinnen Holltrop Methodvenkat krishnaÎncă nu există evaluări
- 77-9 Design of CranesDocument10 pagini77-9 Design of Cranesrip111176Încă nu există evaluări
- Worked Example - Aircraft Flight Mechanics by Harry Smith, PHDDocument17 paginiWorked Example - Aircraft Flight Mechanics by Harry Smith, PHDhung dangÎncă nu există evaluări
- Flight Dynamics StabilityDocument165 paginiFlight Dynamics StabilityGeorges Ghazi50% (2)
- Mathcad - InPEX Masela FLNG Korea-Batam (Calm)Document5 paginiMathcad - InPEX Masela FLNG Korea-Batam (Calm)fahmyits100% (1)
- Chapter 6Document31 paginiChapter 6Camille LardizabalÎncă nu există evaluări
- Flow Over Weirs ReportDocument6 paginiFlow Over Weirs ReportميسرةÎncă nu există evaluări
- Appendix B Performance Analysis of A Subsonic Jet Transport - 3 TopicsDocument12 paginiAppendix B Performance Analysis of A Subsonic Jet Transport - 3 TopicsalysonmicheaalaÎncă nu există evaluări
- TutorialsDocument14 paginiTutorialsAzraie Bin RuslimÎncă nu există evaluări
- Statistical Methods For Quality Control: Assignment 1 PRN: 20060641001Document6 paginiStatistical Methods For Quality Control: Assignment 1 PRN: 20060641001ADITI ANCHALIYA (200703076)Încă nu există evaluări
- sm1 059Document2 paginism1 059Paulo Henrique D. FavarettoÎncă nu există evaluări
- NBCC Commentary - Steel Member WindDocument2 paginiNBCC Commentary - Steel Member WindtylerlhsmithÎncă nu există evaluări
- MSM Lecture 02Document36 paginiMSM Lecture 02RafaelÎncă nu există evaluări
- Solution To Exam No. 2Document5 paginiSolution To Exam No. 2mozam haqÎncă nu există evaluări
- Ch.8 - Exhaust Flow Elements and ProblemsDocument1 paginăCh.8 - Exhaust Flow Elements and ProblemsJohn Joseph AmoresÎncă nu există evaluări
- 9 SolutionsDocument6 pagini9 SolutionsKathleen HalwachsÎncă nu există evaluări
- Wind LOADDocument4 paginiWind LOADSahil OzaÎncă nu există evaluări
- CALCULO QadmDocument6 paginiCALCULO Qadmbenjamin manosalvaÎncă nu există evaluări
- The Parachute Problem: Ronald Phoebus and Cole ReillyDocument23 paginiThe Parachute Problem: Ronald Phoebus and Cole ReillyChathura ChamikaraÎncă nu există evaluări
- Static Longitudinal Stability (Chapter 3) PDF PDFDocument18 paginiStatic Longitudinal Stability (Chapter 3) PDF PDFFlightsimmer77Încă nu există evaluări
- LBM GPU Hsu2018Document14 paginiLBM GPU Hsu2018Lado KranjcevicÎncă nu există evaluări
- Solution Exercise Sheet 1 Mec 3707Document5 paginiSolution Exercise Sheet 1 Mec 3707Uqbah AzamÎncă nu există evaluări
- Programul Matlab: WhileDocument4 paginiProgramul Matlab: WhileAntony BalabanÎncă nu există evaluări
- Calculation of The Longitudinal Stability DerivatiDocument7 paginiCalculation of The Longitudinal Stability DerivatiAntony Balaban100% (1)
- Estimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Document8 paginiEstimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Antony BalabanÎncă nu există evaluări
- 441 Lecture 1 AircraftDocument28 pagini441 Lecture 1 AircraftBeatrice FiranÎncă nu există evaluări
- 441 Lecture 1 AircraftDocument28 pagini441 Lecture 1 AircraftBeatrice FiranÎncă nu există evaluări
- 03 - Circuite Logice Integrate in Automatizari IDocument1 pagină03 - Circuite Logice Integrate in Automatizari IAntony BalabanÎncă nu există evaluări
- 441 Lecture 1 AircraftDocument28 pagini441 Lecture 1 AircraftBeatrice FiranÎncă nu există evaluări
- Calculation of The Longitudinal Stability DerivatiDocument7 paginiCalculation of The Longitudinal Stability DerivatiAntony Balaban100% (1)
- Lecture 4Document20 paginiLecture 4Chegrani AhmedÎncă nu există evaluări
- Estimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Document8 paginiEstimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Antony BalabanÎncă nu există evaluări
- Estimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Document8 paginiEstimation of Wing Loading and Thrust Loading - 8 Topics: Example 4.19Antony BalabanÎncă nu există evaluări
- New Microsoft Word DocumentDocument3 paginiNew Microsoft Word DocumentAntony BalabanÎncă nu există evaluări
- Tema 1: Fisier IntrareDocument3 paginiTema 1: Fisier IntrareAntony BalabanÎncă nu există evaluări
- Melkou2017 Article Fixed-WingUAVAttitudeAndAltituDocument12 paginiMelkou2017 Article Fixed-WingUAVAttitudeAndAltituAntony BalabanÎncă nu există evaluări
- Uav MSC Thesis - Very - GoodDocument139 paginiUav MSC Thesis - Very - Goodapi-3772840100% (3)
- Ae 201 10Document28 paginiAe 201 10Antony BalabanÎncă nu există evaluări
- 2.is SticlaDocument1 pagină2.is SticlaAntony BalabanÎncă nu există evaluări
- 1.is MetalDocument2 pagini1.is MetalAntony BalabanÎncă nu există evaluări
- 3.is - Carbon 45 GradeDocument1 pagină3.is - Carbon 45 GradeAntony BalabanÎncă nu există evaluări
- Interactive Aerospace Engineering and Design by Dava J. NewmanDocument374 paginiInteractive Aerospace Engineering and Design by Dava J. NewmanGuillermo Alcantara100% (1)
- Elements of Airplane PerformanceDocument20 paginiElements of Airplane PerformanceAntony BalabanÎncă nu există evaluări
- Cruise Flight OptimizationDocument77 paginiCruise Flight OptimizationAntony BalabanÎncă nu există evaluări
- Uav MSC Thesis - Very - GoodDocument139 paginiUav MSC Thesis - Very - Goodapi-3772840100% (3)
- PerformanceDocument17 paginiPerformanceAbhishek KumarÎncă nu există evaluări
- ETOPS Initial - Revised LogoDocument112 paginiETOPS Initial - Revised LogoKaran Karan0% (1)
- Marshall Space Flight Center, Huntsville, AL 35812: NomenclatureDocument13 paginiMarshall Space Flight Center, Huntsville, AL 35812: Nomenclaturecezy80Încă nu există evaluări
- QRH (Quick Reference Handbook) A320Document160 paginiQRH (Quick Reference Handbook) A320FENWICKÎncă nu există evaluări
- Jakarta HalimDocument12 paginiJakarta HalimApa Hak Anda Menanyakan ItuÎncă nu există evaluări
- Klaxellx PDF 1554929280Document75 paginiKlaxellx PDF 1554929280Samuel AlmecigaÎncă nu există evaluări
- Study On Internationalisation and Fragmentation of Value Chains and Security of Supply - AeronauticsDocument41 paginiStudy On Internationalisation and Fragmentation of Value Chains and Security of Supply - AeronauticsPaolo VelcichÎncă nu există evaluări
- Lilium AnalysisDocument35 paginiLilium AnalysisrmcdoÎncă nu există evaluări
- A Good Airfoil For Small RC ModelsDocument6 paginiA Good Airfoil For Small RC ModelsJosé Luiz CamargoÎncă nu există evaluări
- B1900 EfisDocument11 paginiB1900 EfisRodrigo SousaÎncă nu există evaluări
- Surender Test PaperDocument3 paginiSurender Test PaperAapkaLoduÎncă nu există evaluări
- Hindustan Aeronautics LimitedDocument7 paginiHindustan Aeronautics LimitedVaibhav SharmaÎncă nu există evaluări
- 03 Moon Landing - Three Astronauts From The Apollo 11 Crew - KidsNewsDocument4 pagini03 Moon Landing - Three Astronauts From The Apollo 11 Crew - KidsNewsSIQIAN LIUÎncă nu există evaluări
- Helicopter Operation and MaintenanceDocument11 paginiHelicopter Operation and MaintenanceBellmore BalayongÎncă nu există evaluări
- Celier Aviation: Service ManualDocument79 paginiCelier Aviation: Service Manualben bilmemÎncă nu există evaluări
- Runway Based Space Launch SystemDocument27 paginiRunway Based Space Launch SystemBobby GolasÎncă nu există evaluări
- Cessna POH Chapter 5Document49 paginiCessna POH Chapter 5Jessica Camille TorresÎncă nu există evaluări
- Aircraft Design ProjectDocument75 paginiAircraft Design ProjectPrabowo Galih Mahanendra100% (1)
- Maintenance and The Development of Maintenance Manuals For Light Sport AircraftDocument6 paginiMaintenance and The Development of Maintenance Manuals For Light Sport AircraftAhmad Zubair RasulyÎncă nu există evaluări
- Working Title CJ4 User Guide v0.9.0Document37 paginiWorking Title CJ4 User Guide v0.9.0Rodrigo SousaÎncă nu există evaluări
- Aerodynamics and Aircraft Operations Definitions Angle of Attack and Stalling SpeedsDocument14 paginiAerodynamics and Aircraft Operations Definitions Angle of Attack and Stalling SpeedsLuis PinedaÎncă nu există evaluări
- TaxiBot Day1 PDFDocument39 paginiTaxiBot Day1 PDFTфmmy WilmarkÎncă nu există evaluări
- PB4Y-1 Liberator Pilots GuideDocument91 paginiPB4Y-1 Liberator Pilots GuideDavid Eckert100% (1)
- Fast Cert Test CasesDocument38 paginiFast Cert Test CaseskometmayorÎncă nu există evaluări
- F IMPDocument4 paginiF IMPNeethÎncă nu există evaluări
- Analysis of The Interactional Aerodynamics of The Vahana eVTOL Using A Medium Fidelity Open Source Tool TVF-2020-ForShareDocument47 paginiAnalysis of The Interactional Aerodynamics of The Vahana eVTOL Using A Medium Fidelity Open Source Tool TVF-2020-ForShareTe PekaÎncă nu există evaluări
- A350 Special 2016 PDFDocument16 paginiA350 Special 2016 PDFNick TsangÎncă nu există evaluări
- Calling A Spade A SpadeDocument1 paginăCalling A Spade A SpadesergiolldÎncă nu există evaluări