S-ar putea să vă placă și
- HP-12C Solutions HandbookDocument165 paginiHP-12C Solutions Handbookjfvegaya100% (1)
- Beginning Digital Electronics through ProjectsDe la EverandBeginning Digital Electronics through ProjectsEvaluare: 5 din 5 stele5/5 (1)
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxDe la EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxEvaluare: 4 din 5 stele4/5 (2)
- DEL1-Delivery Outward - Induction Only-R14Document73 paginiDEL1-Delivery Outward - Induction Only-R14Preethi GopalanÎncă nu există evaluări
- Consolidated Framework and Exam RoadmapsDocument11 paginiConsolidated Framework and Exam RoadmapsNguyen Hoang AnhÎncă nu există evaluări
- FX-CAN Hardware Manual.V110.enDocument5 paginiFX-CAN Hardware Manual.V110.enL X100% (2)
- Aluminum Water HydrogenDocument27 paginiAluminum Water HydrogenjbolzanÎncă nu există evaluări
- Instructions For Tenmars TM-195Document5 paginiInstructions For Tenmars TM-195JairoÎncă nu există evaluări
- Brushless DC Motor Drive Circuit TDA5144: Philips Semiconductors Product SpecificationDocument17 paginiBrushless DC Motor Drive Circuit TDA5144: Philips Semiconductors Product SpecificationCarlos NavarroÎncă nu există evaluări
- bl3406b BellingDocument12 paginibl3406b BellingПавел СлободянюкÎncă nu există evaluări
- 364 25532 0 Saa1501Document20 pagini364 25532 0 Saa1501Nidhin KÎncă nu există evaluări
- Tda7052b 3Document16 paginiTda7052b 3Radamés Paulo Do Rosário XavierÎncă nu există evaluări
- bd34705ks2 eDocument39 paginibd34705ks2 esatyamÎncă nu există evaluări
- CBT3257 DatasheetDocument11 paginiCBT3257 Datasheetfibbo2012Încă nu există evaluări
- Integrated CircuitsDocument12 paginiIntegrated CircuitsNunFraÎncă nu există evaluări
- Sim6880m Driver Motor 3 PhaseDocument52 paginiSim6880m Driver Motor 3 Phaseluis albertoÎncă nu există evaluări
- Service Manual: RDR-GX360Document85 paginiService Manual: RDR-GX360Rick SÎncă nu există evaluări
- LC5910S Data Sheet: Critical Current Mode Buck LED Driver ICDocument22 paginiLC5910S Data Sheet: Critical Current Mode Buck LED Driver ICalvaro marcos manuel lopezÎncă nu există evaluări
- Data SheetDocument10 paginiData SheetJosé AntônioÎncă nu există evaluări
- Aoz1212ai PDFDocument18 paginiAoz1212ai PDF060279Încă nu există evaluări
- Data Sheet: TDA7052A/ATDocument12 paginiData Sheet: TDA7052A/ATjoel loayzaÎncă nu există evaluări
- Cambridge Audio Azur 640-C Mk2 Service ManualDocument44 paginiCambridge Audio Azur 640-C Mk2 Service ManualVicente FernandezÎncă nu există evaluări
- Infineon Tle7230r Ds v03 04 enDocument15 paginiInfineon Tle7230r Ds v03 04 enياسين الطنفوريÎncă nu există evaluări
- Stpmic1: Power Management ICDocument15 paginiStpmic1: Power Management ICBenyamin Farzaneh AghajarieÎncă nu există evaluări
- BD94062FDocument35 paginiBD94062FMazalan HectorÎncă nu există evaluări
- T B 6 6 1 2 F N G: Driver IC For Dual DC MotorDocument11 paginiT B 6 6 1 2 F N G: Driver IC For Dual DC MotorJunius SaputraÎncă nu există evaluări
- Po54G00A, Po74G00A: 54, 74 Series Noise Cancellation GHZ LogicDocument6 paginiPo54G00A, Po74G00A: 54, 74 Series Noise Cancellation GHZ LogicspotÎncă nu există evaluări
- Po54G02A, Po74G02A: 54, 74 Series Noise Cancellation GHZ LogicDocument6 paginiPo54G02A, Po74G02A: 54, 74 Series Noise Cancellation GHZ LogicspotÎncă nu există evaluări
- Datasheet of TDA8703Document19 paginiDatasheet of TDA8703Станислав ИвановÎncă nu există evaluări
- PWM Type DC/DC Converter IC Included 650V MOSFET: DatasheetDocument23 paginiPWM Type DC/DC Converter IC Included 650V MOSFET: DatasheetDaiverJuarezÎncă nu există evaluări
- TB67H400AHG: PWM Chopper-TypeDocument23 paginiTB67H400AHG: PWM Chopper-Typegeneric111Încă nu există evaluări
- TB67H451FNG: PWM Chopper Type DC Brushed Motor DriverDocument21 paginiTB67H451FNG: PWM Chopper Type DC Brushed Motor Drivermalak na3eemÎncă nu există evaluări
- General Description Features: 1A 200Khz Superswitcher™ Buck RegulatorDocument15 paginiGeneral Description Features: 1A 200Khz Superswitcher™ Buck RegulatorAli MontielÎncă nu există evaluări
- RYCHIP Semiconductor Inc RY9120 - C2930864Document13 paginiRYCHIP Semiconductor Inc RY9120 - C2930864vs674584Încă nu există evaluări
- Memory Modul Part Number D2X533BW-X256Document8 paginiMemory Modul Part Number D2X533BW-X256Rendy Adam FarhanÎncă nu există evaluări
- Product Description Product Features: 2-Bit Bus Switch With Active Low EnablesDocument3 paginiProduct Description Product Features: 2-Bit Bus Switch With Active Low EnablesksÎncă nu există evaluări
- Shouding: Features General DescriptionDocument7 paginiShouding: Features General DescriptionJuan SenatoriÎncă nu există evaluări
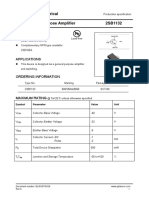
- Galaxy Electrical PNP General Purpose Amplifier 2SB1132Document5 paginiGalaxy Electrical PNP General Purpose Amplifier 2SB1132Ssr ShaÎncă nu există evaluări
- bm2scq12xt LBZ eDocument33 paginibm2scq12xt LBZ eBD MNÎncă nu există evaluări
- HTC Korea TAEJIN Tech CD4093BD - C510571Document9 paginiHTC Korea TAEJIN Tech CD4093BD - C510571SABBIR HOSSAINÎncă nu există evaluări
- SEIPRA Girouette AV Minibus - MBI5168Document15 paginiSEIPRA Girouette AV Minibus - MBI5168Smec KEOLISÎncă nu există evaluări
- High Speed Low Dropout Middle Current Voltage Regulators: General Description FeaturesDocument13 paginiHigh Speed Low Dropout Middle Current Voltage Regulators: General Description FeaturesВадим МкртчянÎncă nu există evaluări
- Bd9470xxx eDocument38 paginiBd9470xxx eJose GargaglioneÎncă nu există evaluări
- BLT53Document12 paginiBLT53zbhp zÎncă nu există evaluări
- 2309Document5 pagini2309Carlos A. Naranjo E.Încă nu există evaluări
- Utf-8' '2012041215332322Document14 paginiUtf-8' '2012041215332322Anonymous gH8rfDÎncă nu există evaluări
- Sound Processor: With Built-In 2-Band EqualizerDocument31 paginiSound Processor: With Built-In 2-Band EqualizerShankar DhanpalÎncă nu există evaluări
- General Description Features: 12A-Peak Low-Side MOSFET Driver Bipolar/CMOS/DMOS ProcessDocument14 paginiGeneral Description Features: 12A-Peak Low-Side MOSFET Driver Bipolar/CMOS/DMOS ProcessNikhil SharmaÎncă nu există evaluări
- BD47xx Series - Datasheet. Www.s-Manuals - ComDocument14 paginiBD47xx Series - Datasheet. Www.s-Manuals - Comlewis gonzalezÎncă nu există evaluări
- BA6208Document4 paginiBA6208jcsg2007Încă nu există evaluări
- APL5932A/B/C/D: Features General DescriptionDocument21 paginiAPL5932A/B/C/D: Features General DescriptionAku KudupiknikÎncă nu există evaluări
- μ-step System Lens Driver: for Digital Still CamerasDocument21 paginiμ-step System Lens Driver: for Digital Still CamerasLeonardo SoaresÎncă nu există evaluări
- TDA7056ADocument11 paginiTDA7056AVinicius GabrielÎncă nu există evaluări
- SA5888Document8 paginiSA5888albinicue1Încă nu există evaluări
- Afterlife 2020Document13 paginiAfterlife 2020RafikGuergourÎncă nu există evaluări
- DMOS Driver For 3-Phase Brushless DC Motor: FeaturesDocument34 paginiDMOS Driver For 3-Phase Brushless DC Motor: FeaturesValentin ToaderÎncă nu există evaluări
- AP7215Document11 paginiAP7215Farouk AnçaÎncă nu există evaluări
- Monitoring Relays 1-Phase True RMS AC/DC Over or Under Current Types DIB02, PIB02Document4 paginiMonitoring Relays 1-Phase True RMS AC/DC Over or Under Current Types DIB02, PIB02ShiaTVfanÎncă nu există evaluări
- DVP-K870P K880P SMDocument87 paginiDVP-K870P K880P SMReginÎncă nu există evaluări
- Fuente 32ld874ht PDFDocument13 paginiFuente 32ld874ht PDFies837Încă nu există evaluări
- Bzb784 Series 2Document8 paginiBzb784 Series 2drain rainÎncă nu există evaluări
- Panasonic Toyota Cq-js6880g SMDocument28 paginiPanasonic Toyota Cq-js6880g SMdumberÎncă nu există evaluări
- Features: OLP CC A CCDocument18 paginiFeatures: OLP CC A CCDiego SerranoÎncă nu există evaluări
- Dual-Channel Synchronous DC-DC Step-Down Controller With 5V/3.3V LdosDocument22 paginiDual-Channel Synchronous DC-DC Step-Down Controller With 5V/3.3V Ldosrdbm rdbmÎncă nu există evaluări
- Digi-Log Reverb Module (Btdr-3) : A Great Digital Reverb Sound That Easily Replaces A Spring Reverberation UnitDocument3 paginiDigi-Log Reverb Module (Btdr-3) : A Great Digital Reverb Sound That Easily Replaces A Spring Reverberation UnitDmedÎncă nu există evaluări
- BTDR 3Document3 paginiBTDR 3FlyinGaitÎncă nu există evaluări
- Instructions For Removing Malware: Melani / Govcert - CHDocument12 paginiInstructions For Removing Malware: Melani / Govcert - CHBerlo VmpÎncă nu există evaluări
- TDA5144 Data SheetDocument17 paginiTDA5144 Data SheetJairoÎncă nu există evaluări
- Safety Instructions: Warning CautionDocument141 paginiSafety Instructions: Warning CautionCarlos Rafael Chota ArévaloÎncă nu există evaluări
- Data Sheet: TDA5142TDocument20 paginiData Sheet: TDA5142TJairoÎncă nu există evaluări
- Safety Instructions: Warning CautionDocument141 paginiSafety Instructions: Warning CautionCarlos Rafael Chota ArévaloÎncă nu există evaluări
- Safety Instructions: Warning CautionDocument141 paginiSafety Instructions: Warning CautionCarlos Rafael Chota ArévaloÎncă nu există evaluări
- ALE DeskPhones Essential Range Datasheet en PDFDocument4 paginiALE DeskPhones Essential Range Datasheet en PDFDimuthu KumarasingheÎncă nu există evaluări
- (Tutorial) Low Dropout Regulators (Hanomulu)Document40 pagini(Tutorial) Low Dropout Regulators (Hanomulu)ahmedÎncă nu există evaluări
- Theoretical and Practical Study of A Photovoltaic MPPT AlgorithmDocument8 paginiTheoretical and Practical Study of A Photovoltaic MPPT Algorithmabdallah hosinÎncă nu există evaluări
- Lesson 2 - The Input-Process-Output (IPO)Document24 paginiLesson 2 - The Input-Process-Output (IPO)Maverik LansangÎncă nu există evaluări
- C# Interview QuestionsDocument6 paginiC# Interview Questionssreenath100% (5)
- JNTUK CurriculumDocument45 paginiJNTUK CurriculumMhappyCuÎncă nu există evaluări
- 10 - 1 PID ControllersDocument36 pagini10 - 1 PID ControllersShilpya KurniasihÎncă nu există evaluări
- Calculate Client Security Hash - 2020.10 Exercise HintsDocument5 paginiCalculate Client Security Hash - 2020.10 Exercise HintsUnTalChuchooÎncă nu există evaluări
- Create Report On Apex From FusionDocument1 paginăCreate Report On Apex From FusionKhaled NewChallenge NgeÎncă nu există evaluări
- Lesson 26 Input/Output and Program Control Statements Introduction in TheDocument20 paginiLesson 26 Input/Output and Program Control Statements Introduction in TheSandeep PatelÎncă nu există evaluări
- Agfa EPhoto 780c Digital Camera ManualDocument61 paginiAgfa EPhoto 780c Digital Camera ManualDrewÎncă nu există evaluări
- SPHE1003Ax PDFDocument29 paginiSPHE1003Ax PDFGuillermito PelosiÎncă nu există evaluări
- UTFT Supported Display Modules & ControllersDocument4 paginiUTFT Supported Display Modules & ControllersJohn MarinÎncă nu există evaluări
- Psalm MizukiDocument40 paginiPsalm MizukiShawna GibbsÎncă nu există evaluări
- Ourlog 8091Document2 paginiOurlog 8091Alucard FFÎncă nu există evaluări
- Python Star Course ContentDocument8 paginiPython Star Course Contentabhishekdwivedi100% (1)
- Infineon TLE7236SE DS v01 01 enDocument37 paginiInfineon TLE7236SE DS v01 01 enSamukaOliveiraÎncă nu există evaluări
- The Definitive Guide To 1N4002 Diode and DatasheetDocument7 paginiThe Definitive Guide To 1N4002 Diode and DatasheetjackÎncă nu există evaluări
- Connectivity Overview of Branch ConnectivityDocument22 paginiConnectivity Overview of Branch ConnectivityMuhammad FiazÎncă nu există evaluări
- Tech Man Eng DFWL Plus 01.03 22.11Document60 paginiTech Man Eng DFWL Plus 01.03 22.11Povilas KrikščiūnasÎncă nu există evaluări
- Fu Well 250605Document2 paginiFu Well 250605Play ChapÎncă nu există evaluări
- Creating Fortran Win AppsDocument125 paginiCreating Fortran Win AppsaaxinteÎncă nu există evaluări
- 24 GHZ To 44 GHZ Wideband Integrated Upconverters and Downconverters Boost Microwave Radio Performance While Reducing SizeDocument4 pagini24 GHZ To 44 GHZ Wideband Integrated Upconverters and Downconverters Boost Microwave Radio Performance While Reducing SizeSergeyÎncă nu există evaluări
- A Methodological Review Based Version Control System With Evolutionary Research For Software ProcessesDocument6 paginiA Methodological Review Based Version Control System With Evolutionary Research For Software ProcessesSandraÎncă nu există evaluări
- K220DSF SVC Manual V1.0 160826Document99 paginiK220DSF SVC Manual V1.0 160826GlimasÎncă nu există evaluări
- LCD Color Television 47VL963G: Service ManualDocument126 paginiLCD Color Television 47VL963G: Service ManualDaniel Zorrilla100% (1)
- C++ SyllabusDocument2 paginiC++ SyllabusvexixodÎncă nu există evaluări