S-ar putea să vă placă și
- Calculo Componentes Transmisiones Mecanicas 24698Document52 paginiCalculo Componentes Transmisiones Mecanicas 24698FidelVargasTapiaÎncă nu există evaluări
- Ejercicios TransferDocument4 paginiEjercicios TransferFidelVargasTapiaÎncă nu există evaluări
- FourierDocument73 paginiFourierGustavoÎncă nu există evaluări
- Ejercicios de RefrigeraciónDocument4 paginiEjercicios de RefrigeraciónFidelVargasTapiaÎncă nu există evaluări
- Clase03 y 04-Diagrama de Nyquist-EstabilidadDocument35 paginiClase03 y 04-Diagrama de Nyquist-EstabilidadAlex LinaresÎncă nu există evaluări
- Mantenimiento de Los Sistemas HidraulicosDocument15 paginiMantenimiento de Los Sistemas HidraulicosMarcos Salinas MedranoÎncă nu există evaluări
- Simuladores de Sistemas Hidraulicos NeumaticosDocument30 paginiSimuladores de Sistemas Hidraulicos NeumaticosFidelVargasTapiaÎncă nu există evaluări
- Coleccion Tablas Graficas TCDocument48 paginiColeccion Tablas Graficas TCJhiefrydd MonserrattÎncă nu există evaluări
- Estudio de Impacto AmbientalDocument9 paginiEstudio de Impacto AmbientalFidelVargasTapiaÎncă nu există evaluări
- Auditoria de GestiónDocument14 paginiAuditoria de Gestiónluna100280Încă nu există evaluări
- Sistema de Gestion Ambiental PDFDocument49 paginiSistema de Gestion Ambiental PDFluiseduardo_plcÎncă nu există evaluări
- Estudio de Impacto AmbientalDocument9 paginiEstudio de Impacto AmbientalFidelVargasTapiaÎncă nu există evaluări
- Manifiesto Ambiental IndustrialDocument11 paginiManifiesto Ambiental IndustrialGaby RiveraÎncă nu există evaluări
- La ContaminaciónDocument17 paginiLa ContaminaciónFidelVargasTapiaÎncă nu există evaluări
- Tema 10Document18 paginiTema 10FidelVargasTapiaÎncă nu există evaluări
- Clase03 y 04-Diagrama de Nyquist-EstabilidadDocument35 paginiClase03 y 04-Diagrama de Nyquist-EstabilidadAlex LinaresÎncă nu există evaluări
- Capítulo 04 Parte 1Document16 paginiCapítulo 04 Parte 1Alvaro UgarteÎncă nu există evaluări
- DSP Tren Metropolitano de Cochabamba1 PDFDocument179 paginiDSP Tren Metropolitano de Cochabamba1 PDFFidelVargasTapia100% (1)
- Guia de Ejercicios de SoldaduraDocument7 paginiGuia de Ejercicios de SoldaduraTatuajes Zeros100% (6)
- Preinforme Tema 1 - Determinacion de Funcion de TransferenciaDocument4 paginiPreinforme Tema 1 - Determinacion de Funcion de TransferenciaFidelVargasTapiaÎncă nu există evaluări
- Manual de Deform 3dDocument28 paginiManual de Deform 3dFidelVargasTapia50% (2)
- Diseño de Reducción TrabajoDocument26 paginiDiseño de Reducción TrabajoFidelVargasTapiaÎncă nu există evaluări
- Material Del Piñón y Catarina Tension Cadena y Lubricacion de CadenaDocument2 paginiMaterial Del Piñón y Catarina Tension Cadena y Lubricacion de CadenaFidelVargasTapiaÎncă nu există evaluări
- CAP I Metales No FerrososDocument25 paginiCAP I Metales No FerrososMiguel Angel AGÎncă nu există evaluări
- Preguntas de Repaso Tema 10Document2 paginiPreguntas de Repaso Tema 10FidelVargasTapia100% (1)
- Disec3b1o de Engranes en SolidworksDocument47 paginiDisec3b1o de Engranes en Solidworks_r_32Încă nu există evaluări
- Calculo de Transmisiones Piñon y Catalina Dom 16Document5 paginiCalculo de Transmisiones Piñon y Catalina Dom 16FidelVargasTapiaÎncă nu există evaluări
- Modelos 2Document5 paginiModelos 2FidelVargasTapiaÎncă nu există evaluări
- 4140 PDFDocument1 pagină4140 PDFFidelVargasTapiaÎncă nu există evaluări
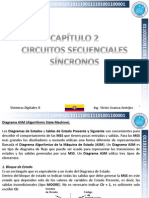
- Circuitos Secuenciales SincronosDocument14 paginiCircuitos Secuenciales SincronosAlex Fernando Coro LuzuriagaÎncă nu există evaluări
- Comportamiento de Afluencia de Formaciones ProductorasDocument11 paginiComportamiento de Afluencia de Formaciones ProductorasJens Araujo Carrillo50% (2)
- TemarioAdmision2022 2Document18 paginiTemarioAdmision2022 2Susan Cáceres AquiseÎncă nu există evaluări
- Tarea Citas IEEEDocument2 paginiTarea Citas IEEEArlene SpringÎncă nu există evaluări
- Tesis AcutusDocument77 paginiTesis AcutusAlba Gonzalez GonzalezÎncă nu există evaluări
- Actividad 2 Equipos para La Elaboración de QuesosDocument6 paginiActividad 2 Equipos para La Elaboración de QuesosAlejandra Alzate de LópezÎncă nu există evaluări
- Laboratorio N01 MICRO 2Document12 paginiLaboratorio N01 MICRO 2Juan CRÎncă nu există evaluări
- Paneles Solares Funcionamiento Tipos Usos PDFDocument8 paginiPaneles Solares Funcionamiento Tipos Usos PDFAnonymous G6LM09m100% (1)
- Nivelaciones 4 Lenguaje - MatemáticasDocument113 paginiNivelaciones 4 Lenguaje - MatemáticasNayis Isabel Julio MatuteÎncă nu există evaluări
- Grupo 11 - MergedDocument15 paginiGrupo 11 - MergedEder Diaz SandovalÎncă nu există evaluări
- Covertidor Frecuencia VoltajeDocument3 paginiCovertidor Frecuencia VoltajeFernando Villa NuñezÎncă nu există evaluări
- Triángulos, Congruencia, SemejanzaDocument6 paginiTriángulos, Congruencia, SemejanzaKeylev CastellanosÎncă nu există evaluări
- Geometría 2022Document16 paginiGeometría 2022angeles riveroÎncă nu există evaluări
- PlanchaDocument9 paginiPlanchaLuis MerkadoÎncă nu există evaluări
- La Oración Es La Unidad de Expresión en El IdiomaDocument6 paginiLa Oración Es La Unidad de Expresión en El IdiomaMoasibeaÎncă nu există evaluări
- Castro Jesus Jeronimo - Geometria en Olimpiadas Matematicas PDFDocument148 paginiCastro Jesus Jeronimo - Geometria en Olimpiadas Matematicas PDFJosé Javier Cruz TorresÎncă nu există evaluări
- Diferentes Plataformas de Desarrollo Visual GraficoDocument3 paginiDiferentes Plataformas de Desarrollo Visual GraficoCarin Gregorio100% (5)
- Diodo ZenerDocument5 paginiDiodo ZenerSebastian MorquechoÎncă nu există evaluări
- Tema 1 Física TeoriaDocument19 paginiTema 1 Física Teoriaalex gVÎncă nu există evaluări
- Conceptos de LógicaDocument24 paginiConceptos de Lógicamartor191Încă nu există evaluări
- Fisico Quimica PracticaDocument10 paginiFisico Quimica PracticaOscar Ronal Espinoza JapaÎncă nu există evaluări
- AUB PL3b ResueltaDocument21 paginiAUB PL3b ResueltaLORENZO Martínez MerchanteÎncă nu există evaluări
- Gallinas de TraspatioDocument25 paginiGallinas de TraspatioAngel Gabriel López CamposÎncă nu există evaluări
- Perdida de Carga en Tubería.: Caudal Presión Pérdidas de Carga (Continuas y Localizadas)Document5 paginiPerdida de Carga en Tubería.: Caudal Presión Pérdidas de Carga (Continuas y Localizadas)Plus Al tiroÎncă nu există evaluări
- Metodo de InferenciaDocument3 paginiMetodo de InferenciaAlejandra Castrillon AriasÎncă nu există evaluări
- Intérprete Sencillo Utilizando PLY Con Python 3Document9 paginiIntérprete Sencillo Utilizando PLY Con Python 3andres zumarragaÎncă nu există evaluări
- Presentacion OdorizadorDocument25 paginiPresentacion OdorizadorMiguel Jiménez FloresÎncă nu există evaluări
- Presentación PPT Clase Semana 5Document36 paginiPresentación PPT Clase Semana 5Odin de JesusÎncă nu există evaluări
- EcocardiogramaDocument23 paginiEcocardiogramaSandy CyndyÎncă nu există evaluări