S-ar putea să vă placă și
- Digital Signal Processing: Markus KuhnDocument104 paginiDigital Signal Processing: Markus Kuhnwesen derbeÎncă nu există evaluări
- 1.finite Impulse Response (FIR) FiltersDocument16 pagini1.finite Impulse Response (FIR) FiltersSamet YılmazÎncă nu există evaluări
- FIR & IIR Filters DesignDocument12 paginiFIR & IIR Filters DesignPreeti KatiyarÎncă nu există evaluări
- Analysis of Sampled Imaging SystemsDocument187 paginiAnalysis of Sampled Imaging SystemsGustav1_o2Încă nu există evaluări
- Fpga Implementation of Fir FilterDocument69 paginiFpga Implementation of Fir FilterDebashis Kar100% (1)
- Design Technique of Bandpass FIR Filter Using Various Window FunctionDocument6 paginiDesign Technique of Bandpass FIR Filter Using Various Window FunctionSai ManojÎncă nu există evaluări
- The First Step of SERVO GUIDE PDFDocument58 paginiThe First Step of SERVO GUIDE PDFVladimirAgeevÎncă nu există evaluări
- Activity#6-Filter DesignDocument6 paginiActivity#6-Filter DesignAdrianne BastasaÎncă nu există evaluări
- Implementing Bit-Serial Digital Filters in At6000 FpgasDocument9 paginiImplementing Bit-Serial Digital Filters in At6000 FpgasPravesh KharelÎncă nu există evaluări
- Design of IIR Elliptical Band Pass Filter: Expt. No.: 3ADocument12 paginiDesign of IIR Elliptical Band Pass Filter: Expt. No.: 3Arahul273gamingÎncă nu există evaluări
- Simulation of EMI Filters Using MatlabDocument4 paginiSimulation of EMI Filters Using MatlabinventionjournalsÎncă nu există evaluări
- Simulation of EMI Filters Using Matlab: M.Satish Kumar, Dr.A.JhansiraniDocument4 paginiSimulation of EMI Filters Using Matlab: M.Satish Kumar, Dr.A.JhansiraniDhanush VishnuÎncă nu există evaluări
- Filtering Data With Signal Processing Toolbox Software - MATLAB & SimulinkDocument15 paginiFiltering Data With Signal Processing Toolbox Software - MATLAB & SimulinkcesarinigillasÎncă nu există evaluări
- dt0091-lattice-wave-digital-filter-design-and-automatic-c-code-generation-stmicroelectronicsDocument8 paginidt0091-lattice-wave-digital-filter-design-and-automatic-c-code-generation-stmicroelectronicsDemy MusicÎncă nu există evaluări
- Reduction of power supply noise with digital filtersDocument9 paginiReduction of power supply noise with digital filtersडाँ सूर्यदेव चौधरीÎncă nu există evaluări
- FSK FiltersDocument4 paginiFSK Filtersdanial4419Încă nu există evaluări
- Experiment 6 Implementation of LP Fir Filter For A Given SequenceDocument25 paginiExperiment 6 Implementation of LP Fir Filter For A Given SequenceSrinivas SamalÎncă nu există evaluări
- RII & RIF FiltersDocument13 paginiRII & RIF FiltersMedab Abd El MalekÎncă nu există evaluări
- Fir and Iir Digital Filter Design GuideDocument11 paginiFir and Iir Digital Filter Design Guidecatia_v5rÎncă nu există evaluări
- Optimized Digital Filter Architectures For Multi-Standard RF TransceiversDocument15 paginiOptimized Digital Filter Architectures For Multi-Standard RF TransceiversvvigyaÎncă nu există evaluări
- FIR Filter Project ReportDocument12 paginiFIR Filter Project ReportDebayan ChatterjeeÎncă nu există evaluări
- Direct Digital Synthesis: Application Note #5 Impact On Function Generator DesignDocument5 paginiDirect Digital Synthesis: Application Note #5 Impact On Function Generator Designvinay_2211Încă nu există evaluări
- Area Efficient Design of Fir Filter Using Symmetric StructureDocument4 paginiArea Efficient Design of Fir Filter Using Symmetric StructureJins ThomasÎncă nu există evaluări
- Lab Sheet: Faculty of Engineering & TechnologyDocument12 paginiLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokÎncă nu există evaluări
- Multirate Filters and Wavelets: From Theory To ImplementationDocument22 paginiMultirate Filters and Wavelets: From Theory To ImplementationAnsari RehanÎncă nu există evaluări
- Power Area FILTERSDocument8 paginiPower Area FILTERSRasigan UrÎncă nu există evaluări
- 2018-EE-391 - Faiqa Imtiaz (Lab 10) - 1Document12 pagini2018-EE-391 - Faiqa Imtiaz (Lab 10) - 1Noman NosherÎncă nu există evaluări
- F0283111611-Ijsce Paper - SubirDocument5 paginiF0283111611-Ijsce Paper - SubirSubir MaityÎncă nu există evaluări
- Decimation 2Document5 paginiDecimation 2Preeti SharmaÎncă nu există evaluări
- Analysis and Design of FIR Filters Using Window Function in MatlabDocument6 paginiAnalysis and Design of FIR Filters Using Window Function in MatlabErika YujraÎncă nu există evaluări
- Performance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignDocument8 paginiPerformance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Digital Filter: Sinusoidal ResponseDocument3 paginiDigital Filter: Sinusoidal ResponseAltaf HussainÎncă nu există evaluări
- Design of FIR Filter Using Window Method: IPASJ International Journal of Electronics & Communication (IIJEC)Document5 paginiDesign of FIR Filter Using Window Method: IPASJ International Journal of Electronics & Communication (IIJEC)International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- FIR FilterDocument5 paginiFIR FilterManasa UpadhyayaÎncă nu există evaluări
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDocument10 paginiHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsAmit RajÎncă nu există evaluări
- Transposed Form FIR Filters: Core Generator ToolDocument13 paginiTransposed Form FIR Filters: Core Generator ToolRabab M AlyÎncă nu există evaluări
- Anti-Aliasing Analog FiltersDocument12 paginiAnti-Aliasing Analog FiltersDocÎncă nu există evaluări
- FULLTEXT01Document134 paginiFULLTEXT01Senthilkumar KrishnamoorthyÎncă nu există evaluări
- What Is FilteringDocument17 paginiWhat Is FilteringShoaib RathoreÎncă nu există evaluări
- Implementation of Reconfigurable Adaptive Filtering AlgorithmsDocument5 paginiImplementation of Reconfigurable Adaptive Filtering AlgorithmsChaitanyaÎncă nu există evaluări
- Performance Analysis of FIR Digital High Pass FiltersDocument4 paginiPerformance Analysis of FIR Digital High Pass FiltersVictoria GuerreroÎncă nu există evaluări
- Reprort On Adaptive Filter 1Document38 paginiReprort On Adaptive Filter 1Hachem ElyousfiÎncă nu există evaluări
- Digital Filter Design Using MATLAB FDA ToolDocument12 paginiDigital Filter Design Using MATLAB FDA ToolNaav BamililiÎncă nu există evaluări
- FPGA Implementation of Adaptive Filtering Algorithms For Noise Cancellation-A Technical SurveyDocument10 paginiFPGA Implementation of Adaptive Filtering Algorithms For Noise Cancellation-A Technical SurveyJabran SafdarÎncă nu există evaluări
- Performance Analysis of FIR Filter Algorithm and Architecture To Design A Programmable Pre-Modulation Filter For Avionic ApplicationDocument5 paginiPerformance Analysis of FIR Filter Algorithm and Architecture To Design A Programmable Pre-Modulation Filter For Avionic ApplicationSayeed HabeebÎncă nu există evaluări
- Finite Impulse Response (Fir) : ObjectivesDocument9 paginiFinite Impulse Response (Fir) : ObjectivesAldon JimenezÎncă nu există evaluări
- Design of FIR Filter For Burst Mode Demodulator of Satellite ReceiverDocument5 paginiDesign of FIR Filter For Burst Mode Demodulator of Satellite ReceiverRimsha MaryamÎncă nu există evaluări
- FPGA Implementation of Adaptive Filter for Impulsive Noise ReductionDocument8 paginiFPGA Implementation of Adaptive Filter for Impulsive Noise ReductionNavathej BangariÎncă nu există evaluări
- Digital Design of Filters (FIR,IIR) -part1 ايادDocument19 paginiDigital Design of Filters (FIR,IIR) -part1 ايادMohammed YounisÎncă nu există evaluări
- Q.Explain Aliasing Concept With ExampleDocument15 paginiQ.Explain Aliasing Concept With ExampleManvita MoreÎncă nu există evaluări
- FIR Filter Design Using Improved DA Algorithm for FPGADocument2 paginiFIR Filter Design Using Improved DA Algorithm for FPGALakshmi ManikantaÎncă nu există evaluări
- An Economical Class of Digital Filters For Decimation and Interpolation (El Que Propuso Este Filtro)Document8 paginiAn Economical Class of Digital Filters For Decimation and Interpolation (El Que Propuso Este Filtro)guillermofioberaÎncă nu există evaluări
- Icecds 2017 8389684Document6 paginiIcecds 2017 8389684May Thet TunÎncă nu există evaluări
- Interpolated FIR Filter (MITRA)Document8 paginiInterpolated FIR Filter (MITRA)Brandon HerreraÎncă nu există evaluări
- Continuously Variable Fractional Rate Decimator: Application Note: Virtex-5, Virtex-4, Spartan-3Document11 paginiContinuously Variable Fractional Rate Decimator: Application Note: Virtex-5, Virtex-4, Spartan-3ergatnsÎncă nu există evaluări
- Lab 2: Filter Design and Implementation: Objectives of This LabDocument10 paginiLab 2: Filter Design and Implementation: Objectives of This LabAzrinÎncă nu există evaluări
- Design of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalDocument5 paginiDesign of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalIJMERÎncă nu există evaluări
- Bandpass filter design using MatlabDocument9 paginiBandpass filter design using MatlabKikiKartikaDewiÎncă nu există evaluări
- Bor CelleDocument11 paginiBor CelleAdi KhardeÎncă nu există evaluări
- The Basics of Anti-Aliasing - Using Switched-Capacitor Filters (Maxim Integrated Tutorials-Switched Cap)Document5 paginiThe Basics of Anti-Aliasing - Using Switched-Capacitor Filters (Maxim Integrated Tutorials-Switched Cap)arnoldo3551Încă nu există evaluări
- Software Radio: Sampling Rate Selection, Design and SynchronizationDe la EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationÎncă nu există evaluări
- High-Performance D/A-Converters: Application to Digital TransceiversDe la EverandHigh-Performance D/A-Converters: Application to Digital TransceiversÎncă nu există evaluări
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDDe la EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDÎncă nu există evaluări
- Reverse Engineering For Beginners by Dennis Yurichev - August 2016Document987 paginiReverse Engineering For Beginners by Dennis Yurichev - August 2016ntcaseÎncă nu există evaluări
- CheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsDocument7 paginiCheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsJoão CostaÎncă nu există evaluări
- FAQ - GigatronDocument24 paginiFAQ - GigatronEdsonÎncă nu există evaluări
- Aluminum electrolytic capacitors data sheet overviewDocument8 paginiAluminum electrolytic capacitors data sheet overviewEdson100% (1)
- High Voltage Differential Probe: Main CharacteristicsDocument6 paginiHigh Voltage Differential Probe: Main CharacteristicsEdsonÎncă nu există evaluări
- An 944Document5 paginiAn 944John CareyÎncă nu există evaluări
- Clay, 1979Document5 paginiClay, 1979EdsonÎncă nu există evaluări
- 1.1 Basic Laws of Magnetic TheoryDocument29 pagini1.1 Basic Laws of Magnetic TheoryEdsonÎncă nu există evaluări
- Active Filter NotesDocument19 paginiActive Filter NotesSrinivasu RajuÎncă nu există evaluări
- Nneme, 2014Document5 paginiNneme, 2014EdsonÎncă nu există evaluări
- Applications and Restrictions CMOS PDFDocument15 paginiApplications and Restrictions CMOS PDFPhan Giang ChâuÎncă nu există evaluări
- Programming The GigatronDocument5 paginiProgramming The GigatronEdsonÎncă nu există evaluări
- Gate Drive Hexfet Power MosfetsDocument22 paginiGate Drive Hexfet Power MosfetsNacer MezghicheÎncă nu există evaluări
- Buso1 PDFDocument74 paginiBuso1 PDFHenkÎncă nu există evaluări
- Circuit To Increase Input Range-Sbaa244Document6 paginiCircuit To Increase Input Range-Sbaa244EdsonÎncă nu există evaluări
- Analog Design PDFDocument101 paginiAnalog Design PDFGabriela ValentinaÎncă nu există evaluări
- Antialiasing Filter Circuit Design-Sbaa282Document10 paginiAntialiasing Filter Circuit Design-Sbaa282EdsonÎncă nu există evaluări
- CircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtDocument68 paginiCircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtJacobo SimonidesÎncă nu există evaluări
- SEMIKRON Application-Note High Voltage Testing EN 2016-08-22 Rev-00 PDFDocument11 paginiSEMIKRON Application-Note High Voltage Testing EN 2016-08-22 Rev-00 PDFBhavik PrajapatiÎncă nu există evaluări
- 1A An-7003 Gate Resistor-Principles and Applications Rev00Document10 pagini1A An-7003 Gate Resistor-Principles and Applications Rev00Barbara EllisÎncă nu există evaluări
- Grugel, 2016Document4 paginiGrugel, 2016EdsonÎncă nu există evaluări
- Cosmic Ray Failures in Power Electronics: Application NoteDocument12 paginiCosmic Ray Failures in Power Electronics: Application NoteEdsonÎncă nu există evaluări
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDocument95 paginiAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonÎncă nu există evaluări
- Application Note: Connection Between Gate Driver and ControllerDocument4 paginiApplication Note: Connection Between Gate Driver and ControllerEdsonÎncă nu există evaluări
- Brief Summary of Topological Geometrodynamics (TGDDocument3 paginiBrief Summary of Topological Geometrodynamics (TGDEdsonÎncă nu există evaluări
- Svindrych, 2012Document5 paginiSvindrych, 2012EdsonÎncă nu există evaluări
- Application Note: Connection Between Gate Driver and ControllerDocument4 paginiApplication Note: Connection Between Gate Driver and ControllerEdsonÎncă nu există evaluări
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDocument95 paginiAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonÎncă nu există evaluări
- About Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFDocument95 paginiAbout Strange Effects Related To Rotating Magnetic-Faraday - (2019) PDFEdsonÎncă nu există evaluări
- Brief Summary of Topological Geometrodynamics (TGDDocument3 paginiBrief Summary of Topological Geometrodynamics (TGDEdsonÎncă nu există evaluări
- DSP Lab ManualDocument57 paginiDSP Lab ManualjagavannammaÎncă nu există evaluări
- DAFx17 Paper 94Document8 paginiDAFx17 Paper 94alumo100cdÎncă nu există evaluări
- Paper - Design and Analysis of FIR Filter Using Artificial Neural Network - 2015Document4 paginiPaper - Design and Analysis of FIR Filter Using Artificial Neural Network - 2015Armando CajahuaringaÎncă nu există evaluări
- Signal Chain Design GuideDocument20 paginiSignal Chain Design GuideLi OuyangÎncă nu există evaluări
- 4 EcDocument13 pagini4 EcayushmanaÎncă nu există evaluări
- Active Filter Id-IqDocument6 paginiActive Filter Id-Iqknighthood4allÎncă nu există evaluări
- Notes Digital Communication Lecture 1 - 4Document63 paginiNotes Digital Communication Lecture 1 - 4dinkarbhombe100% (2)
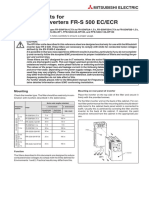
- RFI Filter Units For Frequency Inverters FR-S 500 EC/ECR: Mitsubishi ElectricDocument4 paginiRFI Filter Units For Frequency Inverters FR-S 500 EC/ECR: Mitsubishi ElectricTrung kien NguyenÎncă nu există evaluări
- Mathematica Filter DesignDocument5 paginiMathematica Filter Designkemo_750252831Încă nu există evaluări
- Ec8501 Digital Communication: Baseband Transmission & ReceptionDocument27 paginiEc8501 Digital Communication: Baseband Transmission & ReceptionJakir Hussain G KÎncă nu există evaluări
- Reynolds03 JSSC Vol38no9 Pp1555-1560 ADirectConvReceiverICforWCDMAMobileSystemsDocument6 paginiReynolds03 JSSC Vol38no9 Pp1555-1560 ADirectConvReceiverICforWCDMAMobileSystemsTom BlattnerÎncă nu există evaluări
- AD8232Document28 paginiAD8232محمد نÎncă nu există evaluări
- Shanthi PavanDocument12 paginiShanthi PavanAasif HameedÎncă nu există evaluări
- A New Portable ELF Schumann Resonance Receiver: Design and Detailed Analysis of The Antenna and The Analog Front-EndDocument12 paginiA New Portable ELF Schumann Resonance Receiver: Design and Detailed Analysis of The Antenna and The Analog Front-EndPaxyInRsÎncă nu există evaluări
- A Study Pulse Code Modulation: Provided by K-State Research ExchangeDocument57 paginiA Study Pulse Code Modulation: Provided by K-State Research Exchangedtvt2006Încă nu există evaluări
- Audio Processing Using MatlabDocument12 paginiAudio Processing Using MatlabMuneeb IrfanÎncă nu există evaluări
- Stacked Plate Capacitor Design Technique For Filters Constructed On Multilayer SubstratesDocument2 paginiStacked Plate Capacitor Design Technique For Filters Constructed On Multilayer SubstratesArif MSÎncă nu există evaluări
- Dark Horizon Manual enDocument28 paginiDark Horizon Manual enfasoulÎncă nu există evaluări
- Time Domain Reflectometer SystemDocument71 paginiTime Domain Reflectometer SystemS_gabrielÎncă nu există evaluări
- 4K410 - Exercises 2014-2015Document17 pagini4K410 - Exercises 2014-2015Abhishek SharmaÎncă nu există evaluări
- UNIT-1:: Digital Communication System Part A (2 Marks)Document2 paginiUNIT-1:: Digital Communication System Part A (2 Marks)Aravind BalasundaramÎncă nu există evaluări
- RF Filtering For 5GDocument11 paginiRF Filtering For 5GJAMILÎncă nu există evaluări
- Digital Signal Processing Lab ManualDocument37 paginiDigital Signal Processing Lab ManualVishurockÎncă nu există evaluări
- Unit-Iv Small-Signal Stability Analysis With ControllersDocument37 paginiUnit-Iv Small-Signal Stability Analysis With Controllershabte gebreial shrashrÎncă nu există evaluări
- 4730 0013 04bDocument966 pagini4730 0013 04bDoron ForshtatÎncă nu există evaluări
- CX3G PLC User Manual OverviewDocument2 paginiCX3G PLC User Manual OverviewYuriÎncă nu există evaluări
- CO PO JustificationDocument4 paginiCO PO JustificationNithya Velam0% (1)