S-ar putea să vă placă și
- Instrucciones de 8086 y 8088Document19 paginiInstrucciones de 8086 y 8088Carlos PertuzÎncă nu există evaluări
- Instrucciones de Transferencia de DatosDocument12 paginiInstrucciones de Transferencia de DatosAlexiel YagMinÎncă nu există evaluări
- Instrucciones EMU 8086Document6 paginiInstrucciones EMU 8086william rojasÎncă nu există evaluări
- Organizacion de La Unidad Central de ProcesamientoDocument53 paginiOrganizacion de La Unidad Central de ProcesamientoAndre CzeCh CreewÎncă nu există evaluări
- Practica 5 MicroproDocument234 paginiPractica 5 MicroproDeivid Quinde ConstanteÎncă nu există evaluări
- AssemblerDocument85 paginiAssembleralexepn23100% (1)
- Unidad 2 Lenguaje de InterfazDocument16 paginiUnidad 2 Lenguaje de InterfazLuis Oscar Calderon100% (1)
- Juego de Instrucciones 8086-8088Document17 paginiJuego de Instrucciones 8086-8088Fernando Mamani RojasÎncă nu există evaluări
- Instrucciones Básicas de Bascom AvrDocument18 paginiInstrucciones Básicas de Bascom AvrCheChyHrÎncă nu există evaluări
- Resumen FinalDocument14 paginiResumen FinalniangarasÎncă nu există evaluări
- Conjunto de Instrucciones Del Intel 8086Document81 paginiConjunto de Instrucciones Del Intel 8086PitershÎncă nu există evaluări
- 1 Trabajo Preparatorio Práctica Nº1Document9 pagini1 Trabajo Preparatorio Práctica Nº1Wil Fabi LaguatasigÎncă nu există evaluări
- Tarea4 EdgarSaavedraDocument8 paginiTarea4 EdgarSaavedraJoan Nikolas Saavedra MuñozÎncă nu există evaluări
- Parcial 2Document17 paginiParcial 2Nestor Oved Salazar CastilloÎncă nu există evaluări
- Silo - Tips Programacion en Ensamblador Del Microprocesador Pentium IDocument6 paginiSilo - Tips Programacion en Ensamblador Del Microprocesador Pentium IMiguel José Gutierrez LanzaÎncă nu există evaluări
- Lenguaje Ensamblador EmbebidoDocument9 paginiLenguaje Ensamblador EmbebidoArturo AguilarÎncă nu există evaluări
- P1 U1 Equipo4Document17 paginiP1 U1 Equipo4Pepe JamesÎncă nu există evaluări
- PRACTICA 1 Resuelta MicroprocesadoresDocument26 paginiPRACTICA 1 Resuelta MicroprocesadoresAleXander DiiazÎncă nu există evaluări
- PM - Parcial 1 - Clase 05 - Instrucciones de Salto, Comparaciones, Uso de Banderas PDFDocument21 paginiPM - Parcial 1 - Clase 05 - Instrucciones de Salto, Comparaciones, Uso de Banderas PDFRaul BaidalÎncă nu există evaluări
- Laboratorio 3Document13 paginiLaboratorio 3Abel CabaÎncă nu există evaluări
- Guia 10Document9 paginiGuia 10Ana QuezadaÎncă nu există evaluări
- Manual de AsemblerDocument8 paginiManual de Asemblersanto2208Încă nu există evaluări
- Unidad 4 - EnsambladorDocument7 paginiUnidad 4 - Ensambladorrichydo100% (1)
- Lenguajes de Interfaz - Kevin Alexandro Diego CastroDocument19 paginiLenguajes de Interfaz - Kevin Alexandro Diego CastroKevin Diego CastroÎncă nu există evaluări
- Ensamblador (1) USAR UNIDAD 2Document24 paginiEnsamblador (1) USAR UNIDAD 2bringas19Încă nu există evaluări
- Unidad II - Programación BásicaDocument27 paginiUnidad II - Programación BásicaGalen MarekÎncă nu există evaluări
- UNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de InterfazDocument9 paginiUNIDAD 2-Subtemas 2.6, 2.7, 2.9 y 2.10 Lenguajes de Interfazluis angel roman valdovinosÎncă nu există evaluări
- 1.4.4 Instrucciones Del ProgramaDocument7 pagini1.4.4 Instrucciones Del ProgramaRicardo FabrizioÎncă nu există evaluări
- Manual de AsemblerDocument8 paginiManual de AsemblerLeandro Israel Mena LópezÎncă nu există evaluări
- Glosario Lenguaje MaquinaDocument2 paginiGlosario Lenguaje MaquinaNolanÎncă nu există evaluări
- Grupo 46 Glorizgomez3Document19 paginiGrupo 46 Glorizgomez3xavierforeroÎncă nu există evaluări
- Entorno MingoDocument20 paginiEntorno Mingoness0788Încă nu există evaluări
- Title La Subrutina OperacionDocument4 paginiTitle La Subrutina OperacionFîôrêllâ MîrândâÎncă nu există evaluări
- Curso Radasm IIIDocument16 paginiCurso Radasm IIIWalter TalaveranoÎncă nu există evaluări
- Actividad 3 Arquitectura de ComputadorasDocument17 paginiActividad 3 Arquitectura de ComputadorasErnesto TorresÎncă nu există evaluări
- Conjunto de Instrucciones x86Document7 paginiConjunto de Instrucciones x86registrosegÎncă nu există evaluări
- Set de Instrucciones Intel Core 2 DuoDocument12 paginiSet de Instrucciones Intel Core 2 DuoJerson Cadena MÎncă nu există evaluări
- Base de Preguntas ArqDocument8 paginiBase de Preguntas Arqgean gsÎncă nu există evaluări
- Set de Instrucciones Del 8088-1Document6 paginiSet de Instrucciones Del 8088-1Jhordam Maxwell Gómez TorresÎncă nu există evaluări
- Unidad II - 1 Paradigma Imperativo, Introducción, EnsambladorDocument5 paginiUnidad II - 1 Paradigma Imperativo, Introducción, EnsambladorMateo Luna BazánÎncă nu există evaluări
- Ensamblador EjemplosDocument10 paginiEnsamblador EjemplosMiriam GaliciaÎncă nu există evaluări
- Programacion BasicaDocument24 paginiProgramacion Basicacampos0791Încă nu există evaluări
- Instrucciones EMU 8086Document35 paginiInstrucciones EMU 8086Edwin RodriguezÎncă nu există evaluări
- Las Instrucciones Del EnsambladorDocument7 paginiLas Instrucciones Del EnsambladorAlejandro Leota100% (1)
- Que Significa Cada NemonicoDocument5 paginiQue Significa Cada NemonicoZombiejpgÎncă nu există evaluări
- 8-Programación en AsemblerDocument28 pagini8-Programación en AsemblerIvon Hinostroza SarmientoÎncă nu există evaluări
- Instrucciones Assembler SoportadasDocument13 paginiInstrucciones Assembler SoportadasPoloÎncă nu există evaluări
- FC Practica1 1Document28 paginiFC Practica1 1Sergio Garcia RodriguezÎncă nu există evaluări
- Taller 1Document7 paginiTaller 1charly2321323Încă nu există evaluări
- Cuestionario U2Document5 paginiCuestionario U2Tony ReynaÎncă nu există evaluări
- Investigacion U2 Microcontroladores - Edgar Uriel Hernández MartínezDocument8 paginiInvestigacion U2 Microcontroladores - Edgar Uriel Hernández MartínezEdgar Uriel Hernández MartínezÎncă nu există evaluări
- Apuntes de ClaseDocument38 paginiApuntes de ClaseAldo GuevaraÎncă nu există evaluări
- Practica 0 ADocument5 paginiPractica 0 Ae1s1v09092023Încă nu există evaluări
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe la EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaÎncă nu există evaluări
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe la EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICEvaluare: 2.5 din 5 stele2.5/5 (5)
- Prácticas de redes de datos e industrialesDe la EverandPrácticas de redes de datos e industrialesEvaluare: 4 din 5 stele4/5 (5)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe la EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosEvaluare: 5 din 5 stele5/5 (5)
- Confiabilidad de MySQLDocument2 paginiConfiabilidad de MySQLJavier MewloCx0% (1)
- 3.4. InstanciasMultiplesDocument15 pagini3.4. InstanciasMultiplesJavier MewloCxÎncă nu există evaluări
- Practicas Unidad 1 SISTEMAS PROGRAMABLESDocument12 paginiPracticas Unidad 1 SISTEMAS PROGRAMABLESJavier MewloCxÎncă nu există evaluări
- EntrevistaDocument7 paginiEntrevistaJavier MewloCxÎncă nu există evaluări
- SGBDDocument2 paginiSGBDJavier MewloCxÎncă nu există evaluări
- Confirmar La Seguridad de La Base de DatosDocument2 paginiConfirmar La Seguridad de La Base de DatosJavier MewloCx100% (1)
- Administracioin MyManagerDocument2 paginiAdministracioin MyManagerJavier MewloCxÎncă nu există evaluări
- Investigación Unidad 1Document15 paginiInvestigación Unidad 1Javier MewloCxÎncă nu există evaluări
- Unidad 3 Modularización. Lenguajes de InterfazDocument8 paginiUnidad 3 Modularización. Lenguajes de InterfazJavier MewloCxÎncă nu există evaluări
- Reporte de Investigación "Modelos de Agente Inteligente"Document8 paginiReporte de Investigación "Modelos de Agente Inteligente"Javier MewloCxÎncă nu există evaluări
- Unidad IIIDocument2 paginiUnidad IIIGustGCÎncă nu există evaluări
- Practicas Unidad 2 SISTEMAS PROGRAMABLESDocument17 paginiPracticas Unidad 2 SISTEMAS PROGRAMABLESJavier MewloCxÎncă nu există evaluări
- Unidad 3 Modularización. Lenguajes de InterfazDocument8 paginiUnidad 3 Modularización. Lenguajes de InterfazJavier MewloCxÎncă nu există evaluări
- Avance Del Proyecto Sistema ExpertoDocument3 paginiAvance Del Proyecto Sistema ExpertoJavier MewloCxÎncă nu există evaluări
- Mapa Conceptual Seguridad Donde Muestre La Confiabilidad, Confidencialidad y Disponibilidad de Los Servicios de Red.Document3 paginiMapa Conceptual Seguridad Donde Muestre La Confiabilidad, Confidencialidad y Disponibilidad de Los Servicios de Red.Javier MewloCxÎncă nu există evaluări
- Reporte de Investigación Modelo CognitivoDocument6 paginiReporte de Investigación Modelo CognitivoJavier MewloCxÎncă nu există evaluări
- Reporte Arquitecturas de Un Sistema de Producción.Document8 paginiReporte Arquitecturas de Un Sistema de Producción.Javier MewloCxÎncă nu există evaluări
- Protocolos de Administración de Red y Analizadores de Protocolos (Scanners y Sniffers) .Document7 paginiProtocolos de Administración de Red y Analizadores de Protocolos (Scanners y Sniffers) .Javier MewloCx100% (1)
- Reporte de Investigación Modelo CognitivoDocument6 paginiReporte de Investigación Modelo CognitivoJavier MewloCxÎncă nu există evaluări
- Exposición Sobre Los Agentes InteligentesDocument11 paginiExposición Sobre Los Agentes InteligentesJavier MewloCxÎncă nu există evaluări
- Seguridad Donde Muestre La Confiabilidad, Confidencialidad y Disponibilidad de Los Servicios de Red.Document2 paginiSeguridad Donde Muestre La Confiabilidad, Confidencialidad y Disponibilidad de Los Servicios de Red.Javier MewloCxÎncă nu există evaluări
- Principales Componentes Críticos de Red en Una Organización.Document8 paginiPrincipales Componentes Críticos de Red en Una Organización.Javier MewloCxÎncă nu există evaluări
- Principales Componentes Críticos de Red en Una Organización.Document8 paginiPrincipales Componentes Críticos de Red en Una Organización.Javier MewloCxÎncă nu există evaluări
- Exposición Sobre Los Agentes InteligentesDocument11 paginiExposición Sobre Los Agentes InteligentesJavier MewloCxÎncă nu există evaluări
- Reporte de Investigación - Introducción Al PSP y TSPDocument7 paginiReporte de Investigación - Introducción Al PSP y TSPJavier MewloCxÎncă nu există evaluări
- ANTOLOGIADocument96 paginiANTOLOGIAJavier MewloCxÎncă nu există evaluări
- Introducción Al PSP (Apuntes Digitales)Document4 paginiIntroducción Al PSP (Apuntes Digitales)Javier MewloCxÎncă nu există evaluări
- Reporte de Investigación "Modelos de Agente Inteligente"Document8 paginiReporte de Investigación "Modelos de Agente Inteligente"Javier MewloCxÎncă nu există evaluări
- Reporte de InvestigaciónDocument8 paginiReporte de InvestigaciónJavier MewloCx100% (1)
- Reporte Analizar La Estructura Del Lenguaje Logico PROLOGDocument9 paginiReporte Analizar La Estructura Del Lenguaje Logico PROLOGJavier MewloCxÎncă nu există evaluări
- Aprendizaje Basado en Competencias Una Propuesta para La Evaluacion de Las Competencias GenericasDocument30 paginiAprendizaje Basado en Competencias Una Propuesta para La Evaluacion de Las Competencias GenericasAdriana Torres Romero100% (1)
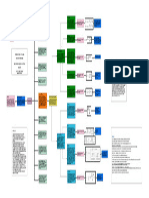
- Metodologías de Identificación de InsightsDocument24 paginiMetodologías de Identificación de InsightsJairo Andrés HuertasÎncă nu există evaluări
- La Luna Por Veinte Dólares, Hernán CasciariDocument2 paginiLa Luna Por Veinte Dólares, Hernán CasciariNatalia Nicoletti100% (1)
- Taller de Tesis Gina SolorzanoDocument40 paginiTaller de Tesis Gina SolorzanoGINA GRISELY SOLORZANO BURGOSÎncă nu există evaluări
- Qué Cambios Promueve La Educación Inclusiva en El Personal DocenteDocument9 paginiQué Cambios Promueve La Educación Inclusiva en El Personal DocenteAnahi HernandezÎncă nu există evaluări
- Necesidades Del EntornoDocument6 paginiNecesidades Del EntornoEsthela VillanuevaÎncă nu există evaluări
- Clasificacion Del SueDocument7 paginiClasificacion Del SueJhoel CRÎncă nu există evaluări
- RESTRICCION DE SodioDocument11 paginiRESTRICCION DE SodioJose Quispe ZamataÎncă nu există evaluări
- Sesion de Matematica Primer GradoDocument6 paginiSesion de Matematica Primer GradomiluskaÎncă nu există evaluări
- 03 Matriz LEDDocument21 pagini03 Matriz LEDJRangel JRangelÎncă nu există evaluări
- Plan de ApoyoDocument3 paginiPlan de ApoyoAndrés SuarezÎncă nu există evaluări
- Evaluacion TransmisonDocument5 paginiEvaluacion TransmisonRodrigo LopezÎncă nu există evaluări
- HUACHIPADocument21 paginiHUACHIPAhector espejo palominoÎncă nu există evaluări
- 5.-El Triángulo de AfarDocument27 pagini5.-El Triángulo de Afarthewarrion100% (5)
- Libro Tecn. Concreto IDocument68 paginiLibro Tecn. Concreto IEDGAR TOCTO FLORESÎncă nu există evaluări
- FarmcodinamiaDocument5 paginiFarmcodinamiaCandela PelaezÎncă nu există evaluări
- Mapa Conceptual Pruebas Estadisticas-1Document1 paginăMapa Conceptual Pruebas Estadisticas-1Ivan FarfanÎncă nu există evaluări
- Benavides Flor Tarea5Document7 paginiBenavides Flor Tarea5Flor Benavides HuamanÎncă nu există evaluări
- Documentos SECOP IIDocument5 paginiDocumentos SECOP IIDiana Maria ValenciaÎncă nu există evaluări
- Introducción Al Emprendimiento e InnovaciónDocument2 paginiIntroducción Al Emprendimiento e InnovaciónGabriela RodriguezÎncă nu există evaluări
- Los Muleros. Cometen Estafa o Blanqueo de CapitalesDocument3 paginiLos Muleros. Cometen Estafa o Blanqueo de CapitalesDaniel RecraÎncă nu există evaluări
- Orientacion Encuentro RoboticaDocument14 paginiOrientacion Encuentro RoboticaverioskaÎncă nu există evaluări
- Arquitectura de Software (Adrian Lasso)Document7 paginiArquitectura de Software (Adrian Lasso)eriveraa100% (14)
- Ciudad UtopicaDocument2 paginiCiudad UtopicaYuriÎncă nu există evaluări
- En La Vida Diez, en La Escuela CeroDocument4 paginiEn La Vida Diez, en La Escuela CeroErika Lopez LaresÎncă nu există evaluări
- Metodologia de La Investigacion - Silabo USMP-FN 2014Document24 paginiMetodologia de La Investigacion - Silabo USMP-FN 2014USMP FN ARCHIVOSÎncă nu există evaluări
- Balotario de Matematica 4Document10 paginiBalotario de Matematica 4Wendy Vasquez VasquezÎncă nu există evaluări
- JJJDocument10 paginiJJJirvingÎncă nu există evaluări
- Los TornadosDocument11 paginiLos TornadosAngel HernandezÎncă nu există evaluări
- Fundamentos de La Administración FinancieraDocument23 paginiFundamentos de La Administración FinancieraHugo DanÎncă nu există evaluări