S-ar putea să vă placă și
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDe la EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorÎncă nu există evaluări
- Operational Torque Measurement in Picking StorageDocument6 paginiOperational Torque Measurement in Picking StorageKHADIJAÎncă nu există evaluări
- AntenaDocument5 paginiAntenaBilisuma DamiteÎncă nu există evaluări
- MATLAB-Arduino As A Low Cost Microcontroller For 3 Phase InverterDocument5 paginiMATLAB-Arduino As A Low Cost Microcontroller For 3 Phase InverterDìieqo RomeroÎncă nu există evaluări
- A Controller Design For Servo Control System Using Different TechniquesDocument8 paginiA Controller Design For Servo Control System Using Different TechniquesKOKOÎncă nu există evaluări
- Optimal PID Controller Parameters For Vector ContrDocument8 paginiOptimal PID Controller Parameters For Vector ContrTony starkÎncă nu există evaluări
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 paginiMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouÎncă nu există evaluări
- Wireless Control System For DC Motor To Position A Dish Antenna Using MicrocomputerDocument7 paginiWireless Control System For DC Motor To Position A Dish Antenna Using MicrocomputerPradeep KumarÎncă nu există evaluări
- Control and Interfacing of BLDC Motor With Labview Using MyrioDocument5 paginiControl and Interfacing of BLDC Motor With Labview Using Myriovasu_koneti5124Încă nu există evaluări
- Enin 2018Document5 paginiEnin 2018Phat Luu TienÎncă nu există evaluări
- 10 - Chapter 6Document35 pagini10 - Chapter 6Debayanbasu.juÎncă nu există evaluări
- IEEE Conference Template 2Document3 paginiIEEE Conference Template 2Alvaro Martin Reyes CordovaÎncă nu există evaluări
- Implementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmDocument7 paginiImplementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmMustafa AlhumayreÎncă nu există evaluări
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 paginiDC Motor Speed Control Using PID Controller in Lab View: January 2015EngidÎncă nu există evaluări
- A Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryDocument6 paginiA Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryZelalem TarekegnÎncă nu există evaluări
- Pid 3413425Document4 paginiPid 3413425togarsÎncă nu există evaluări
- Automatic Synchronisation of AlternatorDocument2 paginiAutomatic Synchronisation of AlternatorInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Comparison of Different DC Motor Positioning Control AlgorithmsDocument6 paginiComparison of Different DC Motor Positioning Control Algorithmsfelres87Încă nu există evaluări
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 paginiGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasÎncă nu există evaluări
- Result PPRDocument5 paginiResult PPRMayuri Chauray-shindeÎncă nu există evaluări
- Practice - Project 2Document3 paginiPractice - Project 2Abisaurio GapÎncă nu există evaluări
- DC Motor Speed Control Using PID Controller in Lab View: February 2015Document5 paginiDC Motor Speed Control Using PID Controller in Lab View: February 2015Muhdnursalam ZolkepliÎncă nu există evaluări
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 paginiDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuÎncă nu există evaluări
- Automation of Belt Conveyor SystemDocument11 paginiAutomation of Belt Conveyor SystemSummA Learning CenterÎncă nu există evaluări
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 paginiModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiÎncă nu există evaluări
- Real Time DC Motor Position Control Using Pid Controller in LabviewDocument8 paginiReal Time DC Motor Position Control Using Pid Controller in LabviewCrazyGamer SLÎncă nu există evaluări
- AGC For Multi AreaDocument5 paginiAGC For Multi AreachalaÎncă nu există evaluări
- Mydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationDocument5 paginiMydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationnorickespinosÎncă nu există evaluări
- Chapter-1: 1.1 Pi ControllerDocument21 paginiChapter-1: 1.1 Pi ControllerRAVINA MANGALÎncă nu există evaluări
- Lab Report Control IDocument19 paginiLab Report Control Iridzwan abuÎncă nu există evaluări
- Camera Movement Control Using PID Controller in LabVIEWDocument5 paginiCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDÎncă nu există evaluări
- New Antiwindup PI Controller For Variable-Speed Motor DrivesDocument6 paginiNew Antiwindup PI Controller For Variable-Speed Motor DrivesAli H. NumanÎncă nu există evaluări
- DC Motor Speed Control Using Artificial Neural Network: Yogesh, Swati Gupta, Mahesh GargDocument6 paginiDC Motor Speed Control Using Artificial Neural Network: Yogesh, Swati Gupta, Mahesh GargSunitha RajuÎncă nu există evaluări
- A Design Method of Pi Controller For An Induction Motor With Par PDFDocument6 paginiA Design Method of Pi Controller For An Induction Motor With Par PDFijazÎncă nu există evaluări
- An044259264 PDFDocument6 paginiAn044259264 PDFmazenÎncă nu există evaluări
- PV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationDocument4 paginiPV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationSenthil KumarÎncă nu există evaluări
- 207 00 Analog and Digital Motor Control Teaching SetDocument2 pagini207 00 Analog and Digital Motor Control Teaching SetDavid de Almeida FiorilloÎncă nu există evaluări
- Phasor Measurement Unit Technology and ItsDocument4 paginiPhasor Measurement Unit Technology and ItsVedaste NdayishimiyeÎncă nu există evaluări
- 16 Swati Sikarwar @amolDocument4 pagini16 Swati Sikarwar @amolAhmad MqdadÎncă nu există evaluări
- Fict Axis Emulation IeeeDocument10 paginiFict Axis Emulation IeeedevchandarÎncă nu există evaluări
- Robot Optimum DesignDocument13 paginiRobot Optimum DesignNarayan ManeÎncă nu există evaluări
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 paginiBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruÎncă nu există evaluări
- MIPRO2014final 1Document7 paginiMIPRO2014final 1Ali ErÎncă nu există evaluări
- ISSN No: 2456: International Open Access Journal International Open Access JournalDocument4 paginiISSN No: 2456: International Open Access Journal International Open Access JournalEditor IJTSRDÎncă nu există evaluări
- Speed Control of A 2HP DC MotorDocument25 paginiSpeed Control of A 2HP DC MotorEdul BrianÎncă nu există evaluări
- Speed Control of Induction Motor Using Fuzzy LogicDocument4 paginiSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCÎncă nu există evaluări
- Precision Motion Control With Variable Speed AC Drives Using PLCDocument5 paginiPrecision Motion Control With Variable Speed AC Drives Using PLCMarulasiddappa H BÎncă nu există evaluări
- Digital Repetitive Controlled Three-Phase PWM Rectifier: Keliang Zhou and Danwei Wang, Member, IEEEDocument8 paginiDigital Repetitive Controlled Three-Phase PWM Rectifier: Keliang Zhou and Danwei Wang, Member, IEEEVicente CabreraÎncă nu există evaluări
- Basler Digital ExcitationDocument8 paginiBasler Digital ExcitationparatonerqÎncă nu există evaluări
- Sensors and ActuatorsDocument62 paginiSensors and ActuatorsPriyanshu NainÎncă nu există evaluări
- Jurnal DC (Genetic Algorithm)Document5 paginiJurnal DC (Genetic Algorithm)Puja Awwalia R.Încă nu există evaluări
- Radio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabDocument4 paginiRadio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabFahmy R. SaputriÎncă nu există evaluări
- Comparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesDocument6 paginiComparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesTony starkÎncă nu există evaluări
- Microcontroller Based Robotic ArmDocument5 paginiMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- Fuzzy Co-Ordination of FACTSDocument11 paginiFuzzy Co-Ordination of FACTSS Bharadwaj ReddyÎncă nu există evaluări
- Comparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527Document6 paginiComparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527DIVYA PRASOONA CÎncă nu există evaluări
- DR Suliman Finalll Paper11 1Document6 paginiDR Suliman Finalll Paper11 1Githma LakshanÎncă nu există evaluări
- DC MotorDocument6 paginiDC MotoroshyenÎncă nu există evaluări
- Borrador Paper InglishhDocument8 paginiBorrador Paper InglishhEladio BurgosÎncă nu există evaluări
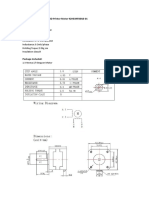
- DatasheetDocument1 paginăDatasheetSebastianÎncă nu există evaluări
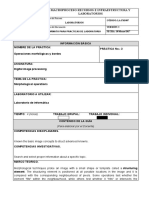
- Macroproceso Recursos E Infraestructura Y Laboratorios: Nombre Del ProcesoDocument20 paginiMacroproceso Recursos E Infraestructura Y Laboratorios: Nombre Del ProcesoSebastianÎncă nu există evaluări
- Macroproceso Recursos E Infraestructura Y Laboratorios: Nombre Del ProcesoDocument16 paginiMacroproceso Recursos E Infraestructura Y Laboratorios: Nombre Del ProcesoSebastianÎncă nu există evaluări
- Self Balancing RobotDocument9 paginiSelf Balancing RobotSebastianÎncă nu există evaluări
- Characterizing Architectural Distortion in Mammograms by Linear SaliencyDocument12 paginiCharacterizing Architectural Distortion in Mammograms by Linear SaliencySebastianÎncă nu există evaluări
- Word Meaning TranslationDocument3 paginiWord Meaning TranslationSebastianÎncă nu există evaluări
- S CV PDFDocument2 paginiS CV PDFSebastianÎncă nu există evaluări
- G5 Pdi 2019Document20 paginiG5 Pdi 2019SebastianÎncă nu există evaluări
- Scopusresults PDFDocument1 paginăScopusresults PDFSebastianÎncă nu există evaluări
- Regions of Alaska PresentationDocument15 paginiRegions of Alaska Presentationapi-260890532Încă nu există evaluări
- MRBR ATR 72 Rev18Document424 paginiMRBR ATR 72 Rev18Juan Forero OrtizÎncă nu există evaluări
- Ozone Therapy - A Clinical Review A. M. Elvis and J. S. EktaDocument5 paginiOzone Therapy - A Clinical Review A. M. Elvis and J. S. Ektatahuti696Încă nu există evaluări
- Dalasa Jibat MijenaDocument24 paginiDalasa Jibat MijenaBelex ManÎncă nu există evaluări
- Residual Power Series Method For Obstacle Boundary Value ProblemsDocument5 paginiResidual Power Series Method For Obstacle Boundary Value ProblemsSayiqa JabeenÎncă nu există evaluări
- Electives - ArchitDocument36 paginiElectives - Architkshitiz singhÎncă nu există evaluări
- Hey Friends B TBDocument152 paginiHey Friends B TBTizianoCiro CarrizoÎncă nu există evaluări
- DPSD ProjectDocument30 paginiDPSD ProjectSri NidhiÎncă nu există evaluări
- Law of EvidenceDocument14 paginiLaw of EvidenceIsha ChavanÎncă nu există evaluări
- Quick Help For EDI SEZ IntegrationDocument2 paginiQuick Help For EDI SEZ IntegrationsrinivasÎncă nu există evaluări
- Sindi and Wahab in 18th CenturyDocument9 paginiSindi and Wahab in 18th CenturyMujahid Asaadullah AbdullahÎncă nu există evaluări
- AIA1800 Operator ManualDocument184 paginiAIA1800 Operator ManualZain Sa'adehÎncă nu există evaluări
- CH 1 - Democracy and American PoliticsDocument9 paginiCH 1 - Democracy and American PoliticsAndrew Philip ClarkÎncă nu există evaluări
- Prelim Examination MaternalDocument23 paginiPrelim Examination MaternalAaron ConstantinoÎncă nu există evaluări
- Vendor Information Sheet - LFPR-F-002b Rev. 04Document6 paginiVendor Information Sheet - LFPR-F-002b Rev. 04Chelsea EsparagozaÎncă nu există evaluări
- Huawei R4815N1 DatasheetDocument2 paginiHuawei R4815N1 DatasheetBysÎncă nu există evaluări
- LEIA Home Lifts Guide FNLDocument5 paginiLEIA Home Lifts Guide FNLTejinder SinghÎncă nu există evaluări
- CEE Annual Report 2018Document100 paginiCEE Annual Report 2018BusinessTech100% (1)
- Floating Oil Skimmer Design Using Rotary Disc MethDocument9 paginiFloating Oil Skimmer Design Using Rotary Disc MethAhmad YaniÎncă nu există evaluări
- Mixed Up MonstersDocument33 paginiMixed Up MonstersjaneÎncă nu există evaluări
- Unit 16 - Monitoring, Review and Audit by Allan WatsonDocument29 paginiUnit 16 - Monitoring, Review and Audit by Allan WatsonLuqman OsmanÎncă nu există evaluări
- 3 Carbohydrates' StructureDocument33 pagini3 Carbohydrates' StructureDilan TeodoroÎncă nu există evaluări
- 04 - Fetch Decode Execute Cycle PDFDocument3 pagini04 - Fetch Decode Execute Cycle PDFShaun HaxaelÎncă nu există evaluări
- FMC Derive Price Action GuideDocument50 paginiFMC Derive Price Action GuideTafara MichaelÎncă nu există evaluări
- Skills Redux (10929123)Document23 paginiSkills Redux (10929123)AndrewCollas100% (1)
- 1.technical Specifications (Piling)Document15 pagini1.technical Specifications (Piling)Kunal Panchal100% (2)
- TCL LD24D50 - Chassis MS09A-LA - (TKLE2413D) - Manual de Servicio PDFDocument41 paginiTCL LD24D50 - Chassis MS09A-LA - (TKLE2413D) - Manual de Servicio PDFFabian OrtuzarÎncă nu există evaluări
- Thermally Curable Polystyrene Via Click ChemistryDocument4 paginiThermally Curable Polystyrene Via Click ChemistryDanesh AzÎncă nu există evaluări
- .Urp 203 Note 2022 - 1642405559000Document6 pagini.Urp 203 Note 2022 - 1642405559000Farouk SalehÎncă nu există evaluări
- CX Programmer Operation ManualDocument536 paginiCX Programmer Operation ManualVefik KaraegeÎncă nu există evaluări