S-ar putea să vă placă și
- Schematic diagram of USB to serial converter circuitDocument1 paginăSchematic diagram of USB to serial converter circuitAugustoferreira Ferreira100% (3)
- The Power of Scarcity: Leveraging Urgency and Demand to Influence Customer DecisionsDe la EverandThe Power of Scarcity: Leveraging Urgency and Demand to Influence Customer DecisionsÎncă nu există evaluări
- THKDocument1.901 paginiTHKapi-26356646Încă nu există evaluări
- FMDS0129Document49 paginiFMDS0129hhÎncă nu există evaluări
- LTE and SchedulingDocument25 paginiLTE and SchedulingKrunoslav IvesicÎncă nu există evaluări
- The Fusion Marketing Bible: Fuse Traditional Media, Social Media, & Digital Media to Maximize MarketingDe la EverandThe Fusion Marketing Bible: Fuse Traditional Media, Social Media, & Digital Media to Maximize MarketingEvaluare: 5 din 5 stele5/5 (2)
- 4 Port UART Arduino MEGA Sample Code: Revised 7/10/15Document1 pagină4 Port UART Arduino MEGA Sample Code: Revised 7/10/15ovidiutacheÎncă nu există evaluări
- Arduino Sample Code EZ COM MEGA PDFDocument1 paginăArduino Sample Code EZ COM MEGA PDFDiego Medina100% (1)
- Arduino Mega PH Sample CodeDocument1 paginăArduino Mega PH Sample Codebethania Maria Paz Apaza GodoyÎncă nu există evaluări
- 106 Universal FeederDocument1 pagină106 Universal FeederzulÎncă nu există evaluări
- 109-Pigeon 2 HoleDocument1 pagină109-Pigeon 2 HolezulÎncă nu există evaluări
- 144-Pill Reminder SMSDocument1 pagină144-Pill Reminder SMSzulÎncă nu există evaluări
- 126-Fingerprint Office SolenoidDocument1 pagină126-Fingerprint Office SolenoidzulÎncă nu există evaluări
- VTS New 1Document1 paginăVTS New 11202jitÎncă nu există evaluări
- Studuino Board ShcematicDocument1 paginăStuduino Board ShcematicJohn Parks100% (1)
- ArduinoDocument1 paginăArduinocarlosÎncă nu există evaluări
- Schematic - Schemat Rfid - 2021-04-25 - 20-26-26Document1 paginăSchematic - Schemat Rfid - 2021-04-25 - 20-26-26totylkojaÎncă nu există evaluări
- Baofeng Uv-3r SCHDocument1 paginăBaofeng Uv-3r SCHVictor Javelosa Azuelo Jr.100% (1)
- Minimize Parasitics To GND Ideal 5pfDocument2 paginiMinimize Parasitics To GND Ideal 5pfahmad barhamÎncă nu există evaluări
- DFR0321 V1.0 SchematicDocument1 paginăDFR0321 V1.0 SchematicCristian GrosaruÎncă nu există evaluări
- Maxm86161 Osbflex Evkit A1 MARKETING SCHDocument1 paginăMaxm86161 Osbflex Evkit A1 MARKETING SCHSamuele AltrudaÎncă nu există evaluări
- 232 5VSDocument1 pagină232 5VSpdf4youÎncă nu există evaluări
- Caixa Acustica PCX6500 Biv. V.ADocument7 paginiCaixa Acustica PCX6500 Biv. V.Aservitec informaticaÎncă nu există evaluări
- U2 chip circuit diagramDocument1 paginăU2 chip circuit diagramTuan Anh100% (1)
- ULinkDocument1 paginăULinkevandroÎncă nu există evaluări
- Power decoupling capacitor placement on audio boardDocument1 paginăPower decoupling capacitor placement on audio boardisubhaÎncă nu există evaluări
- Self Balancing Robot Circuit DiagramDocument1 paginăSelf Balancing Robot Circuit DiagramCalin Popescu100% (1)
- MOD-LCD2.8RTP RevBDocument1 paginăMOD-LCD2.8RTP RevBsureshotstudioÎncă nu există evaluări
- Fig 950106-01241AEF 1220 PDFDocument1 paginăFig 950106-01241AEF 1220 PDFHervé ChédruÎncă nu există evaluări
- Parallel Programmer, Version 2Document1 paginăParallel Programmer, Version 2mikelo tolipÎncă nu există evaluări
- 125-Fingerprint Office 3 ZoneDocument1 pagină125-Fingerprint Office 3 ZonezulÎncă nu există evaluări
- Outseal PLC V5 Darlington PDFDocument1 paginăOutseal PLC V5 Darlington PDFLuqman Sp100% (4)
- CNC-satshakit CNC 20mhz SCHDocument1 paginăCNC-satshakit CNC 20mhz SCHTomi OzzyÎncă nu există evaluări
- DOC001036114Document1 paginăDOC001036114Luis JimenezÎncă nu există evaluări
- PS1501 Power AmpDocument1 paginăPS1501 Power AmpAdriana DundesÎncă nu există evaluări
- ARDUINODocument1 paginăARDUINOJLÎncă nu există evaluări
- Unplugged Power Cord AlarmDocument1 paginăUnplugged Power Cord AlarmH3liaxÎncă nu există evaluări
- MOD-WIFI-ESP8266 board schematicDocument1 paginăMOD-WIFI-ESP8266 board schematicCarlo AdamiÎncă nu există evaluări
- USB type C to USB 2.0 and microcontroller core functionsDocument1 paginăUSB type C to USB 2.0 and microcontroller core functionslekobhÎncă nu există evaluări
- USB type C to USB 2.0 and microcontroller core functionsDocument1 paginăUSB type C to USB 2.0 and microcontroller core functionsDaniel BaronÎncă nu există evaluări
- 232 5VSWDocument1 pagină232 5VSWpdf4youÎncă nu există evaluări
- Schematic: Brand Name: Arofly Model Name: Arofly01Document1 paginăSchematic: Brand Name: Arofly Model Name: Arofly01Basheer AlmetwakelÎncă nu există evaluări
- 4 Phase DtectionDocument1 pagină4 Phase DtectionSubhash Suman100% (2)
- OM5284/EB03 Audio Module Setup GuideDocument4 paginiOM5284/EB03 Audio Module Setup GuideLuis CarlosÎncă nu există evaluări
- LCD H43i 1124Document1 paginăLCD H43i 1124eqweqdÎncă nu există evaluări
- ATMEGA328P-AU Breadboard PololuVersionDocument1 paginăATMEGA328P-AU Breadboard PololuVersionSajad DehghanÎncă nu există evaluări
- Main Pump 2Document1 paginăMain Pump 2Jauhary HarrysÎncă nu există evaluări
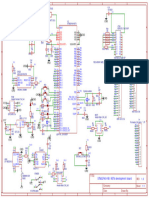
- Schematic_STM32F401RB RET6 development board_2020-05-11_17-18-56Document1 paginăSchematic_STM32F401RB RET6 development board_2020-05-11_17-18-56Fernando GómezÎncă nu există evaluări
- 131 Robot Arm (TX)Document1 pagină131 Robot Arm (TX)zulÎncă nu există evaluări
- PCB LRL FrancoDocument1 paginăPCB LRL FrancoSleshi Mekonnen0% (1)
- ADocument1 paginăAsongpengyuan123Încă nu există evaluări
- Getting Started with the Arducam Mega Camera on Arduino UNODocument10 paginiGetting Started with the Arducam Mega Camera on Arduino UNOaabejaroÎncă nu există evaluări
- Erasynth Micro Rev1.2Document6 paginiErasynth Micro Rev1.2Carlos Gomez CorderoÎncă nu există evaluări
- Circuit 557795Document2 paginiCircuit 557795Muhammad Ali MughalÎncă nu există evaluări
- Design Logo With ESP32Document1 paginăDesign Logo With ESP32alex smuck kamus100% (1)
- Schematic TDA7418TR TDA7418 20190204134459Document1 paginăSchematic TDA7418TR TDA7418 20190204134459marius tanjalaÎncă nu există evaluări
- Schematic Digital Kit 2023-03-18 BGR0sI9GQzDocument1 paginăSchematic Digital Kit 2023-03-18 BGR0sI9GQzSolomon AkpanÎncă nu există evaluări
- Schematic New Project 2022-02-11Document1 paginăSchematic New Project 2022-02-11Макар ДовганьÎncă nu există evaluări
- FS1008E1Document2 paginiFS1008E1Plastipack C.A.Încă nu există evaluări
- Main Rev1 Circuit 2Document1 paginăMain Rev1 Circuit 2Relu IanoviciÎncă nu există evaluări
- 214B, 214B FT & 224B Excavators Electrical System: Machine Harness Connector and Component LocationsDocument2 pagini214B, 214B FT & 224B Excavators Electrical System: Machine Harness Connector and Component Locationsمهدي شقرونÎncă nu există evaluări
- Remote Schematic PDFDocument1 paginăRemote Schematic PDFTóth DominikÎncă nu există evaluări
- Schematic GPS Module 2022-12-14Document1 paginăSchematic GPS Module 2022-12-14samsularief03Încă nu există evaluări
- XkitDocument10 paginiXkitLuisRoseroÎncă nu există evaluări
- L293DDocument7 paginiL293Dapi-370080950% (2)
- Lista de TurbinasDocument2 paginiLista de TurbinasLuisRoseroÎncă nu există evaluări
- L7000S Installion InStructionDocument13 paginiL7000S Installion InStructionLuisRoseroÎncă nu există evaluări
- Manual en Dialux Evo3Document46 paginiManual en Dialux Evo3Vũ Mạnh HàÎncă nu există evaluări
- DS Ac0801 GBDocument20 paginiDS Ac0801 GBHossein Jalali MoghaddamÎncă nu există evaluări
- Windows Mbox Viewer User Manual 1.0.3.4Document33 paginiWindows Mbox Viewer User Manual 1.0.3.4Billy NoelÎncă nu există evaluări
- Spesifikasi Produk SL-500Document2 paginiSpesifikasi Produk SL-500tekmed koesnadiÎncă nu există evaluări
- Reliability EngineeringDocument9 paginiReliability Engineeringnvaradharajan1971Încă nu există evaluări
- Example 1 LS Dyna - Bullet Model SimulationDocument6 paginiExample 1 LS Dyna - Bullet Model Simulationsunil_vrvÎncă nu există evaluări
- The Professional DesktopDocument318 paginiThe Professional Desktopalintuta2Încă nu există evaluări
- Is A Calorie Really A Calorie - Metabolic Advantage of Low-Carbohydrate DietsDocument6 paginiIs A Calorie Really A Calorie - Metabolic Advantage of Low-Carbohydrate DietsGustavo CastroÎncă nu există evaluări
- Home Automation Iot Bca Up (2ND SEMINAR PPT) RTDocument30 paginiHome Automation Iot Bca Up (2ND SEMINAR PPT) RTTejaswiniÎncă nu există evaluări
- Ema 312 Unit 4Document22 paginiEma 312 Unit 4Ahbyna AmorÎncă nu există evaluări
- 4495 10088 1 PBDocument7 pagini4495 10088 1 PBGeorgius Kent DiantoroÎncă nu există evaluări
- Self Report QuestionnaireDocument6 paginiSelf Report QuestionnaireMustafa AL ShlashÎncă nu există evaluări
- Developmental Morphology and Physiology of GrassesDocument26 paginiDevelopmental Morphology and Physiology of GrassesAnonymous xGVfcqÎncă nu există evaluări
- Jaguar Land Rover Configuration Lifecycle Management WebDocument4 paginiJaguar Land Rover Configuration Lifecycle Management WebStar Nair Rock0% (1)
- Biology - Physics Chemistry MCQS: Gyanm'S General Awareness - November 2014Document13 paginiBiology - Physics Chemistry MCQS: Gyanm'S General Awareness - November 2014santosh.manojÎncă nu există evaluări
- Turbine Buyers Guide - Mick Sagrillo & Ian WoofendenDocument7 paginiTurbine Buyers Guide - Mick Sagrillo & Ian WoofendenAnonymous xYhjeilnZÎncă nu există evaluări
- Toyo ML210 thread cutting gear assembly drawingsDocument12 paginiToyo ML210 thread cutting gear assembly drawingsiril anwarÎncă nu există evaluări
- San Unit-Wise QuestionsDocument6 paginiSan Unit-Wise QuestionsSushmitha KodupakaÎncă nu există evaluări
- FDocument1 paginăFDiego PorrasÎncă nu există evaluări
- Physical parameters shaping of Farwa Lagoon - LibyaDocument7 paginiPhysical parameters shaping of Farwa Lagoon - LibyaAsadeg ZaidÎncă nu există evaluări
- CH 07Document27 paginiCH 07Jessica Ibarreta100% (1)
- Epoxy Hardeners, Water-Reducible: ProductsDocument1 paginăEpoxy Hardeners, Water-Reducible: ProductsDhruv SevakÎncă nu există evaluări
- Hydrogen and Its Compound.1Document10 paginiHydrogen and Its Compound.1abhishekÎncă nu există evaluări
- Algebra Translating Algebraic Phrases 001Document2 paginiAlgebra Translating Algebraic Phrases 001crazyomnislash25% (4)
- Potenciometro 15KDocument8 paginiPotenciometro 15Kra101208Încă nu există evaluări
- ISO 8243 2013 Cigarettes - SamplingDocument18 paginiISO 8243 2013 Cigarettes - SamplingEko YuliantoÎncă nu există evaluări
- Camshaft Test SheetDocument4 paginiCamshaft Test SheetsughieantoÎncă nu există evaluări
- ChamSys Touchscreen SupportDocument2 paginiChamSys Touchscreen SupportKayla PadillaÎncă nu există evaluări