S-ar putea să vă placă și
- Leyes Del MovimientoDocument11 paginiLeyes Del MovimientoEduardo AvendañoÎncă nu există evaluări
- Resumen EjecutivoDocument4 paginiResumen EjecutivonicolasÎncă nu există evaluări
- Investigación y Practica Educativa - BoliviaDocument13 paginiInvestigación y Practica Educativa - BoliviaNelson VargasÎncă nu există evaluări
- Molino de Aguai929393Document3 paginiMolino de Aguai929393Kari torresÎncă nu există evaluări
- Universidad - Pedagogica - Centros - Formacion de MAESTROSDocument14 paginiUniversidad - Pedagogica - Centros - Formacion de MAESTROSJorge Ocampo ClarosÎncă nu există evaluări
- Plan Currricular SocialesDocument4 paginiPlan Currricular SocialesJose Condori ChoqueÎncă nu există evaluări
- Perfil de Tesis BorradorDocument14 paginiPerfil de Tesis BorradorAdam Light GuevaraÎncă nu există evaluări
- 1 BiologiaDocument6 pagini1 BiologiaWalter Anibal GarciaÎncă nu există evaluări
- Cuadro Resumen de La Ley 070 BoliviaDocument1 paginăCuadro Resumen de La Ley 070 BoliviaWilma Gladys Forest HerreraÎncă nu există evaluări
- Bolivia: Texto de AprendizajeDocument323 paginiBolivia: Texto de AprendizajeEdtzon Colque Castro100% (1)
- La Reforma Educativa LiberalDocument31 paginiLa Reforma Educativa LiberalJesus ReyesÎncă nu există evaluări
- Texto Didactizado Medidas y MagnitudesDocument20 paginiTexto Didactizado Medidas y Magnitudeswilliam mancillaÎncă nu există evaluări
- Unidad de Formacion 01Document7 paginiUnidad de Formacion 01Mary GutierrezÎncă nu există evaluări
- Taller Leyes de NewtonDocument3 paginiTaller Leyes de NewtonJairo Sastoque0% (1)
- Los Patriarcas de La Plata ResumenDocument2 paginiLos Patriarcas de La Plata ResumenRicardo 2038Încă nu există evaluări
- CR GuaraniDocument21 paginiCR Guaranifrancis viviana garcia chuviruÎncă nu există evaluări
- 2020 Franz Tamayo PNCEDocument10 pagini2020 Franz Tamayo PNCESalinas Copa Csar100% (1)
- Tema 7 La Denotacion 6 Sec. 2021Document2 paginiTema 7 La Denotacion 6 Sec. 2021Brayan SamoÎncă nu există evaluări
- Instrumentos de Investigación - 1er Año de FormaciónDocument59 paginiInstrumentos de Investigación - 1er Año de FormaciónVictor Mamani HuarachiÎncă nu există evaluări
- Ley de La EducacionDocument14 paginiLey de La EducacionSOME tingssÎncă nu există evaluări
- Universidad Autónoma "Gabriel René Moreno": Carrera Ingeniería QuímicaDocument20 paginiUniversidad Autónoma "Gabriel René Moreno": Carrera Ingeniería QuímicaFabricio DávalosÎncă nu există evaluări
- Mi Biografia ReligiosaDocument2 paginiMi Biografia ReligiosaAlejandro PatiñoÎncă nu există evaluări
- Fundamento Psicopedagógico .Document5 paginiFundamento Psicopedagógico .Luz Paredes CruzÎncă nu există evaluări
- Calendario FolkloricoDocument36 paginiCalendario FolkloricorenzodvÎncă nu există evaluări
- Exposicion para Ensamble Instrumental OriginalDocument8 paginiExposicion para Ensamble Instrumental OriginalJabesÎncă nu există evaluări
- 1kirika Jida Kabineña 2022Document87 pagini1kirika Jida Kabineña 2022Juan Jose ApazaÎncă nu există evaluări
- Cronograma de ActividadesDocument2 paginiCronograma de ActividadesANTERO LUIS VASQUEZ ABANTOÎncă nu există evaluări
- Ética Intercultural Ricardo Salas PDFDocument196 paginiÉtica Intercultural Ricardo Salas PDFsafoinc100% (2)
- Cartilla Ciencias Naturales Biologia de 1roDocument18 paginiCartilla Ciencias Naturales Biologia de 1rofelix sotelo cordovaÎncă nu există evaluări
- Desercion Escolar PECDocument26 paginiDesercion Escolar PECLeticia Carolina Quiñones AlvarezÎncă nu există evaluări
- Programa de Atención Integral A Estudiantes Con Talento ExtraordinarioDocument88 paginiPrograma de Atención Integral A Estudiantes Con Talento ExtraordinarioValeria Janina Huarachi TrujilloÎncă nu există evaluări
- Cultura AymaraDocument8 paginiCultura AymaraMarcial Payihuanca ApazaÎncă nu există evaluări
- 1 4929699420091449365Document27 pagini1 4929699420091449365HM DaliaÎncă nu există evaluări
- 2do Carpeta Oficial 2021 09 08Document49 pagini2do Carpeta Oficial 2021 09 08Roly TancaraÎncă nu există evaluări
- B1 Pérez, C. Ana - Surgimiento de Las Normales Caiza D y Warisata PDFDocument97 paginiB1 Pérez, C. Ana - Surgimiento de Las Normales Caiza D y Warisata PDFJiovanny SamanamudÎncă nu există evaluări
- PAQUCHISDocument5 paginiPAQUCHISJoel FloresÎncă nu există evaluări
- Unidad Educativa Gotardo KaiserDocument5 paginiUnidad Educativa Gotardo KaiserMadelenÎncă nu există evaluări
- Malla Curricular ESFM MatemáticaDocument3 paginiMalla Curricular ESFM MatemáticaBruno RodríguezÎncă nu există evaluări
- Causas Que Afectan A EstudiantesDocument30 paginiCausas Que Afectan A Estudiantesmauricio araibar100% (1)
- Guias de Observacion 2023Document8 paginiGuias de Observacion 2023Jhonny FernandezÎncă nu există evaluări
- Ley 070Document8 paginiLey 070Maria Rosa Montaño DuranÎncă nu există evaluări
- Proyecto de Yuliana Sanguino MapaquineDocument42 paginiProyecto de Yuliana Sanguino MapaquineTalita Castro0% (1)
- Guia 3Document4 paginiGuia 3Asukitah de GomitahÎncă nu există evaluări
- Tierra Camba EncantadaDocument1 paginăTierra Camba EncantadaPablo FernandezÎncă nu există evaluări
- 01 Chuquisaca Habilitados Examen Ascenso 2017Document46 pagini01 Chuquisaca Habilitados Examen Ascenso 2017Jose Martin Barrios Flores100% (2)
- PADC 6to FISICADocument3 paginiPADC 6to FISICALEONARDO VIVANCOSÎncă nu există evaluări
- Literatura AymaraDocument9 paginiLiteratura AymaraDiego PaniqueÎncă nu există evaluări
- TABLA Valencia CorregidoDocument1 paginăTABLA Valencia CorregidoRoberto Marin RuizÎncă nu există evaluări
- Armonizacion y Articulacion TaniaDocument6 paginiArmonizacion y Articulacion TaniadjcÎncă nu există evaluări
- Laboratorio 2 Digitales IDocument10 paginiLaboratorio 2 Digitales Ilizeth higueraÎncă nu există evaluări
- Trabajo SistematizaciónDocument8 paginiTrabajo SistematizaciónVidal TiconaÎncă nu există evaluări
- La Escuela Ayllu Está Unida Al Nombre Del Tata Santiago PomaDocument4 paginiLa Escuela Ayllu Está Unida Al Nombre Del Tata Santiago PomaJorge SaucedoÎncă nu există evaluări
- La Religión Como Adoctrinamiento y Desnaturalización de Nuestras CreenciasDocument3 paginiLa Religión Como Adoctrinamiento y Desnaturalización de Nuestras CreenciasAbigail RiveraÎncă nu există evaluări
- Algo Bueno BuenisimoDocument50 paginiAlgo Bueno BuenisimoGerson Claros Navia100% (1)
- Situación de Diglosia en BoliviaDocument15 paginiSituación de Diglosia en BoliviaSARAH VALENTINA GIRONZA GONZALESÎncă nu există evaluări
- Desarrollo de La Convivencia Biocéntrica ComunitariaDocument95 paginiDesarrollo de La Convivencia Biocéntrica ComunitariaJhoddy Arteaga100% (1)
- Malla 2013 MúsicaDocument1 paginăMalla 2013 MúsicaFKevin BaconÎncă nu există evaluări
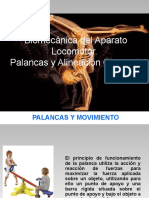
- Biomecanica Del Aparato Locomotor, Palancas y Alineacion TEMA 3Document20 paginiBiomecanica Del Aparato Locomotor, Palancas y Alineacion TEMA 3Alexia ColqueÎncă nu există evaluări
- Anatomia Del MovimientoDocument7 paginiAnatomia Del MovimientoAntar Jose Gòmez CardeñaÎncă nu există evaluări
- Palancasenelcuerpo 120824220155 Phpapp02Document40 paginiPalancasenelcuerpo 120824220155 Phpapp02Richard VargasÎncă nu există evaluări
- Tesi - Jose - Oriol - Martinez - Deporte de Discapacidad PDFDocument272 paginiTesi - Jose - Oriol - Martinez - Deporte de Discapacidad PDFPrevencionista_1983Încă nu există evaluări
- Clase Siete FII UNMSMDocument12 paginiClase Siete FII UNMSMPrevencionista_1983Încă nu există evaluări
- Tesi - Jose - Oriol - Martinez - Deporte de Discapacidad PDFDocument272 paginiTesi - Jose - Oriol - Martinez - Deporte de Discapacidad PDFPrevencionista_1983Încă nu există evaluări
- Libro Control de Perdida Frank BirdDocument644 paginiLibro Control de Perdida Frank BirdCristián Miguel Caneo Inostroza89% (36)
- Ley Nº 30474Document3 paginiLey Nº 30474Prevencionista_1983Încă nu există evaluări
- Modelo de Plan de Direccion de Proyecto Del SIGDocument3 paginiModelo de Plan de Direccion de Proyecto Del SIGPrevencionista_1983Încă nu există evaluări
- Aplicación de Herramienta Espina de PescadoDocument4 paginiAplicación de Herramienta Espina de PescadoPrevencionista_1983Încă nu există evaluări
- Requisitos Legales Club DeportivoDocument4 paginiRequisitos Legales Club DeportivoPrevencionista_1983Încă nu există evaluări
- FODA - para Una Institución DeportivaDocument1 paginăFODA - para Una Institución DeportivaPrevencionista_1983100% (2)
- Modelo de Acta de Revisión Por La DirecciónDocument6 paginiModelo de Acta de Revisión Por La DirecciónPrevencionista_1983Încă nu există evaluări
- Clase Uno Fii UnmsmDocument21 paginiClase Uno Fii UnmsmPrevencionista_1983Încă nu există evaluări
- De La Mente Al TextoDocument98 paginiDe La Mente Al TextoPrevencionista_1983Încă nu există evaluări
- Encuesta de Satisfacción - Club DeportivoDocument1 paginăEncuesta de Satisfacción - Club DeportivoPrevencionista_1983Încă nu există evaluări
- PIF CalidadEmbarcacionesDocument104 paginiPIF CalidadEmbarcacionesLuis Leonardo Castro RodríguezÎncă nu există evaluări
- Todas Las Tareas Derecho NotarialDocument46 paginiTodas Las Tareas Derecho Notarialisaias flores80% (5)
- III Avance Contabilidad Jose MaradiagaDocument7 paginiIII Avance Contabilidad Jose MaradiagaJose MaradiagaÎncă nu există evaluări
- Recien NacidoDocument144 paginiRecien NacidoJessy Ivon PerezÎncă nu există evaluări
- Como Ganarse A La Gente Parte 1 (John C. Maxwell)Document5 paginiComo Ganarse A La Gente Parte 1 (John C. Maxwell)Juan Manuel Gutiérrez Jiménez100% (1)
- Mapa Mental Guia Metodologica para La Formulacion de Indicadores-Brayan PerezDocument1 paginăMapa Mental Guia Metodologica para La Formulacion de Indicadores-Brayan PerezBRAYAN PEREZÎncă nu există evaluări
- Capítulo 1 - Introducción A La GeofísicaDocument114 paginiCapítulo 1 - Introducción A La GeofísicaSarah Duran QuezadaÎncă nu există evaluări
- Cuadro Arthur JanovDocument4 paginiCuadro Arthur JanovMario Mario Marroquin MarroquinÎncă nu există evaluări
- Eloy Tizón. Punto de Vista 2Document1 paginăEloy Tizón. Punto de Vista 2John F. GalindoÎncă nu există evaluări
- Fusarium Oxysporum F.sp. MelonisDocument11 paginiFusarium Oxysporum F.sp. MelonisKarin Santana Gonzales100% (1)
- Autobiografia de Un TriunfadorDocument6 paginiAutobiografia de Un TriunfadorGaby Quimbita0% (1)
- OFIDISMODocument7 paginiOFIDISMOLiussmyth Vega SanchezÎncă nu există evaluări
- Introducción A La 'Valoración en Mercados Emergentes': Robert F. Brune R, Robert M. Conro Mark Kritzman, Wei LiDocument15 paginiIntroducción A La 'Valoración en Mercados Emergentes': Robert F. Brune R, Robert M. Conro Mark Kritzman, Wei LiJuan MercadoÎncă nu există evaluări
- Accesorios para ExcavadoraDocument16 paginiAccesorios para ExcavadorabasiliopedÎncă nu există evaluări
- Contabilidad Basica e ImpuestosDocument5 paginiContabilidad Basica e ImpuestosEricAlejandroPolancoCastilloÎncă nu există evaluări
- Contrato de Publicidad DigitalDocument2 paginiContrato de Publicidad DigitalWilkins López GarayÎncă nu există evaluări
- Lucero AgüeroDocument3 paginiLucero AgüeroLucero AgueroÎncă nu există evaluări
- Hoja 1Document1 paginăHoja 1Emmanuel MaldonadoÎncă nu există evaluări
- Cómo Influye La Actividad Física en El Sistema Digestivo GrupalDocument5 paginiCómo Influye La Actividad Física en El Sistema Digestivo GrupalCINDY JULEISY BONE SANTANAÎncă nu există evaluări
- Inicio Tev 07Document35 paginiInicio Tev 07Alejandro De Labra Caballero0% (1)
- Universidad San Francisco de Quito Usfq: Colegio de Ciencias de La SaludDocument33 paginiUniversidad San Francisco de Quito Usfq: Colegio de Ciencias de La SaludValentinaJiménezÎncă nu există evaluări
- G696 PDFDocument6 paginiG696 PDFDiana VelezÎncă nu există evaluări
- El Valor de La Imagen PersonalDocument33 paginiEl Valor de La Imagen PersonalJuan Kepler Romero CochachiÎncă nu există evaluări
- Estados Financieros ExposicionDocument3 paginiEstados Financieros ExposicionAhilyn AlmeidaÎncă nu există evaluări
- Sintesis de 1 TesalonicensesDocument6 paginiSintesis de 1 TesalonicensesJulio Alfaro EspañaÎncă nu există evaluări
- Planeacion Noviembre 2022Document33 paginiPlaneacion Noviembre 2022saygonoÎncă nu există evaluări
- Linea Temporal - Fics SS de Misao PDFDocument11 paginiLinea Temporal - Fics SS de Misao PDFLeslie PaolaÎncă nu există evaluări
- Desechos Hospitalarios PDFDocument53 paginiDesechos Hospitalarios PDFDavid ChaflocÎncă nu există evaluări
- Aportan Datos Clave Sobre El Desarrollo de Los Primeros DinosauriosDocument3 paginiAportan Datos Clave Sobre El Desarrollo de Los Primeros DinosauriosJose Del Carmen Cabrera CutzÎncă nu există evaluări
- Informe Final EstadisticaDocument2 paginiInforme Final EstadisticaChristian Giraldo AgudeloÎncă nu există evaluări