S-ar putea să vă placă și
- 3.1 Johannes Greber y Su Aportación A La Biblia TNMDocument6 pagini3.1 Johannes Greber y Su Aportación A La Biblia TNM0Avendano100% (1)
- Manejo Poscosecha de Granos PDFDocument76 paginiManejo Poscosecha de Granos PDFLuz Marina Vasquez100% (1)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De la EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Încă nu există evaluări
- Minisumo Ejemplo Codigo Completo PDFDocument4 paginiMinisumo Ejemplo Codigo Completo PDFAnderson Steven Caballero BarbosaÎncă nu există evaluări
- Programas ArduinoDocument8 paginiProgramas Arduinomicha2mcÎncă nu există evaluări
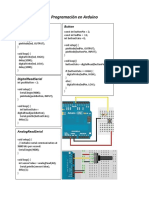
- Programación en ArduinoDocument34 paginiProgramación en ArduinoJohn Morillo100% (1)
- Construcción Del Puente Alton Sobre El Río MississippiDocument2 paginiConstrucción Del Puente Alton Sobre El Río MississippiPaula Andrea Fonseca BaronÎncă nu există evaluări
- Tds Total Fluidmatic-D3 TCQ 202011 Es EspDocument2 paginiTds Total Fluidmatic-D3 TCQ 202011 Es Espcamilo ZambranoÎncă nu există evaluări
- Comandos Básicos de Switches Cisco 2960Document5 paginiComandos Básicos de Switches Cisco 2960Edwin Desiderio TeodoroÎncă nu există evaluări
- Practicas ServomotorDocument15 paginiPracticas ServomotorEdgar Ubaldo Correa GrandeÎncă nu există evaluări
- Presupuesto 01 Aula 6x8 Mts A Ejecutar2 PDFDocument55 paginiPresupuesto 01 Aula 6x8 Mts A Ejecutar2 PDF0AvendanoÎncă nu există evaluări
- NTC-2017 SismoDocument40 paginiNTC-2017 SismoEnrique QuezadaÎncă nu există evaluări
- Codigo Motor Paso A Paso AduinoDocument3 paginiCodigo Motor Paso A Paso AduinoPiero Pisfil PuiconÎncă nu există evaluări
- UntitledDocument1 paginăUntitledVictor PerezÎncă nu există evaluări
- Robot Esquiva ObstaculosDocument4 paginiRobot Esquiva Obstaculosservice électricité bâtimentÎncă nu există evaluări
- Semaforo Con Arduino PDFDocument3 paginiSemaforo Con Arduino PDFGustavo hernandezÎncă nu există evaluări
- Código CochecitoDocument11 paginiCódigo CochecitoAlex QuirogaÎncă nu există evaluări
- Coche BluetoothDocument6 paginiCoche BluetoothCarlos Antonio LiconaÎncă nu există evaluări
- Mod III Laboratorio v2Document11 paginiMod III Laboratorio v2Ruben Ricardo Laura CeronÎncă nu există evaluări
- ROBOTDocument4 paginiROBOTJhonnySanchezÎncă nu există evaluări
- Sistema Transporte Paciente ArduinoDocument5 paginiSistema Transporte Paciente ArduinoRaul PerezÎncă nu există evaluări
- Arduino Control Car V2 byDocument7 paginiArduino Control Car V2 byJulio Gomez HernándezÎncă nu există evaluări
- CarroDocument4 paginiCarroGir EstradaÎncă nu există evaluări
- Arduino Control Car V2 byDocument7 paginiArduino Control Car V2 byedithÎncă nu există evaluări
- Control de DirecciónDocument7 paginiControl de DirecciónAbraham RodriguezÎncă nu există evaluări
- Control K910 Con ArduinoDocument10 paginiControl K910 Con ArduinoSamuel GarnicaÎncă nu există evaluări
- Pracica 1 - Unidad 3 Motor A PasosDocument10 paginiPracica 1 - Unidad 3 Motor A PasosFLAVIO CESAR SANCHEZ MARTINEZÎncă nu există evaluări
- Código Pista de CarrosDocument2 paginiCódigo Pista de CarrosJhonattan JavierÎncă nu există evaluări
- CODIGO Modelo de Peaje Con Ultrasonico y ServomotorDocument1 paginăCODIGO Modelo de Peaje Con Ultrasonico y ServomotorCrizz Cardenas0% (2)
- Programacion Motor Paso A PasoDocument4 paginiProgramacion Motor Paso A PasoguidoÎncă nu există evaluări
- Motor Paso A Paso Ajustado A GradosDocument2 paginiMotor Paso A Paso Ajustado A Gradosflorentino perezÎncă nu există evaluări
- Actividad 3. Arduino Basico SenaDocument11 paginiActividad 3. Arduino Basico SenaJader Funez Olivera100% (1)
- Const Int Motorpin1Document2 paginiConst Int Motorpin1RoldanÎncă nu există evaluări
- CODIGOSDocument13 paginiCODIGOSNuria Arlete Hernández MartínezÎncă nu există evaluări
- ArduinoDocument6 paginiArduinoantonioÎncă nu există evaluări
- Motor ADocument3 paginiMotor AmateoÎncă nu există evaluări
- AguilarAlvaradoJoseMartin19091249-Protns de ArduinoDocument10 paginiAguilarAlvaradoJoseMartin19091249-Protns de ArduinoGriselda Sinahi Perez MartinezÎncă nu există evaluări
- Quiz 5christian Ricardo Resendiz 159669Document5 paginiQuiz 5christian Ricardo Resendiz 159669Cristian LopezzÎncă nu există evaluări
- Plantilla Respuesta Segundo ParcialDocument5 paginiPlantilla Respuesta Segundo ParcialEmanuel CrespoÎncă nu există evaluări
- Codigo Servo UltrasonidoDocument2 paginiCodigo Servo UltrasonidoAnonymous IuHX8xÎncă nu există evaluări
- Ejercicios Con ArduinoDocument19 paginiEjercicios Con ArduinoRubén BecerraÎncă nu există evaluări
- CSyPE 5AV1 P7Document11 paginiCSyPE 5AV1 P7Alex EmilianoÎncă nu există evaluări
- Informe Motor DC y EncoderDocument3 paginiInforme Motor DC y EncoderMarcelo Mamani CharaÎncă nu există evaluări
- Codigos ArduinoDocument5 paginiCodigos ArduinogiulioÎncă nu există evaluări
- 2 - Jairon - Carro Que Evita ObstaculoDocument3 pagini2 - Jairon - Carro Que Evita ObstaculoGabriel ArellanoÎncă nu există evaluări
- AutorDocument6 paginiAutordieguenskyÎncă nu există evaluări
- Codigo DR BladeDocument8 paginiCodigo DR BladeRaullÎncă nu există evaluări
- Reporte de Seguidor de LineaDocument10 paginiReporte de Seguidor de LineaRaymond KenneyÎncă nu există evaluări
- Guia para Tarea2Document4 paginiGuia para Tarea2Ito VenturaÎncă nu există evaluări
- Datos CarritoDocument7 paginiDatos CarritoyokoÎncă nu există evaluări
- Codificación Semaforo Peatonal Con ArduinoDocument2 paginiCodificación Semaforo Peatonal Con ArduinoRobert GalargaÎncă nu există evaluări
- Arduino L298Document8 paginiArduino L298Adriana Muñoz MuñozÎncă nu există evaluări
- Easy Driver ExamplesDocument31 paginiEasy Driver ExamplesViktor ArukipaÎncă nu există evaluări
- CodigoDocument3 paginiCodigoDominic EdmundoÎncă nu există evaluări
- Codigo RobotDocument3 paginiCodigo RobotartuÎncă nu există evaluări
- UntitledDocument4 paginiUntitledSantiago RmsÎncă nu există evaluări
- Simon Dice 2 Botones CodigoDocument9 paginiSimon Dice 2 Botones CodigoIgnacioÎncă nu există evaluări
- Arduino Example 1Document5 paginiArduino Example 1Laura CardenasÎncă nu există evaluări
- Proyecto CarcelDocument8 paginiProyecto CarcelArmando Rojas RojasÎncă nu există evaluări
- Robot Que Evita ObstaculosDocument5 paginiRobot Que Evita ObstaculosFernando LópezÎncă nu există evaluări
- Avance de InformeDocument7 paginiAvance de InformeSebastian Cabello MartínezÎncă nu există evaluări
- UNIDAD 3 Practica 2 Proyecto Parte 2Document4 paginiUNIDAD 3 Practica 2 Proyecto Parte 2Roberto ZuritaÎncă nu există evaluări
- Motor Paso A Paso Con 28BYJ Practicas SalonDocument9 paginiMotor Paso A Paso Con 28BYJ Practicas SalonEmigdioÎncă nu există evaluări
- Exposición de Arduino - 2Document15 paginiExposición de Arduino - 2ego220106Încă nu există evaluări
- ABUSOS SEXUALES de Los Testigos de JehovaDocument25 paginiABUSOS SEXUALES de Los Testigos de Jehova0AvendanoÎncă nu există evaluări
- 25 de EneroDocument6 pagini25 de Enero0AvendanoÎncă nu există evaluări
- 3 No Es Jehovah Es YahwehDocument1 pagină3 No Es Jehovah Es Yahweh0AvendanoÎncă nu există evaluări
- 5 Tom Cabeen Al Leer La Biblia de TNM Se Dio Cuenta Que Estaba MalDocument2 pagini5 Tom Cabeen Al Leer La Biblia de TNM Se Dio Cuenta Que Estaba Mal0AvendanoÎncă nu există evaluări
- 4 Quienes Tradujeron La Biblia TNMDocument31 pagini4 Quienes Tradujeron La Biblia TNM0AvendanoÎncă nu există evaluări
- Base de Obras Transparencia 30 Septiembre 2016 PreliminarDocument161 paginiBase de Obras Transparencia 30 Septiembre 2016 Preliminar0AvendanoÎncă nu există evaluări
- Formas de Comunicación en Las Relaciones HumanasDocument8 paginiFormas de Comunicación en Las Relaciones Humanas0AvendanoÎncă nu există evaluări
- La Onu y El Cuerpo GobernanteDocument22 paginiLa Onu y El Cuerpo Gobernante0AvendanoÎncă nu există evaluări
- Tarea 1 EberDocument39 paginiTarea 1 Eber0AvendanoÎncă nu există evaluări
- PesupuestosDocument6 paginiPesupuestos0AvendanoÎncă nu există evaluări
- Tarea No. 5Document3 paginiTarea No. 5Hugo Alexis Ramírez MarÎncă nu există evaluări
- Formas de Comunicación en Las Relaciones HumanasDocument8 paginiFormas de Comunicación en Las Relaciones Humanas0AvendanoÎncă nu există evaluări
- Terremoto Chile 2010Document42 paginiTerremoto Chile 20100AvendanoÎncă nu există evaluări
- Plan Mecanica de Materiales II PDFDocument8 paginiPlan Mecanica de Materiales II PDFNéstor Abraham García OvandoÎncă nu există evaluări
- Diseño Por ResistenciaDocument3 paginiDiseño Por ResistenciaRoberto Sono HuarcayaÎncă nu există evaluări
- 36 - Hidrologia PDFDocument6 pagini36 - Hidrologia PDF0AvendanoÎncă nu există evaluări
- Manual M-MMP-1-09-06Document9 paginiManual M-MMP-1-09-06León Zito San AgustinÎncă nu există evaluări
- 3012 Tema Analisis 2 - Inversion en InfraestructuraDocument2 pagini3012 Tema Analisis 2 - Inversion en Infraestructura0AvendanoÎncă nu există evaluări
- Cohesion y FriccionDocument7 paginiCohesion y FriccionAugusto Chua AnayaÎncă nu există evaluări
- Cedula HEAE981015HCSRVR03 PDFDocument1 paginăCedula HEAE981015HCSRVR03 PDF0AvendanoÎncă nu există evaluări
- Diseño Por ResistenciaDocument3 paginiDiseño Por ResistenciaRoberto Sono HuarcayaÎncă nu există evaluări
- Estructuras Isostáticas PDFDocument8 paginiEstructuras Isostáticas PDFdarinelÎncă nu există evaluări
- Formulacion y Evaluacion de Proyectos - Clase05 PDFDocument11 paginiFormulacion y Evaluacion de Proyectos - Clase05 PDF0AvendanoÎncă nu există evaluări
- Kardex C171026 PDFDocument1 paginăKardex C171026 PDF0AvendanoÎncă nu există evaluări
- Capitulo 1 Esteban FDocument33 paginiCapitulo 1 Esteban F0AvendanoÎncă nu există evaluări
- RepComprobanteFiscal PDFDocument1 paginăRepComprobanteFiscal PDF0AvendanoÎncă nu există evaluări
- Especificaciones Tecnicas 1441221951312Document44 paginiEspecificaciones Tecnicas 1441221951312Leonel PeñaÎncă nu există evaluări
- Requisitos para Planos de UbicaciónDocument2 paginiRequisitos para Planos de UbicaciónArmando HSÎncă nu există evaluări
- 77 272 Scudo 603.81.251 Es 01 01.07 L LGDocument210 pagini77 272 Scudo 603.81.251 Es 01 01.07 L LGJose Maria Ponce RosilloÎncă nu există evaluări
- Ficha Tecnica Vibrocompactador Hamm FTM-004 - 220808 - 161700Document2 paginiFicha Tecnica Vibrocompactador Hamm FTM-004 - 220808 - 161700katia hernandezÎncă nu există evaluări
- NTP 783 Grúas Torre. Recomendaciones de Seguridad en El Montaje, Desmontaje y Mantenimiento (II)Document6 paginiNTP 783 Grúas Torre. Recomendaciones de Seguridad en El Montaje, Desmontaje y Mantenimiento (II)Deivy De Jesus Cordoba SerratoÎncă nu există evaluări
- 8.-Gestión de Simulacros - Nov2020Document18 pagini8.-Gestión de Simulacros - Nov2020Shanti Adela Rueda MoscosoÎncă nu există evaluări
- Articles-9647 - Recurso - 1 Requisitos LaboratorioDocument61 paginiArticles-9647 - Recurso - 1 Requisitos LaboratorioSandra Chinchilla SandonÎncă nu există evaluări
- Analisis de Sistemas Finol Llinas RosalesDocument116 paginiAnalisis de Sistemas Finol Llinas RosalesmisgleidyÎncă nu există evaluări
- LAB #7 - VISUALIZACION DEL FLUJO EN CANALES - PubDocument6 paginiLAB #7 - VISUALIZACION DEL FLUJO EN CANALES - PubRicardoÎncă nu există evaluări
- EXAMEN DEL TEMA I (Teoria Del Fuego)Document4 paginiEXAMEN DEL TEMA I (Teoria Del Fuego)Ernesto cruz calderonÎncă nu există evaluări
- Tubos Fluorecentes Ilumax PDFDocument2 paginiTubos Fluorecentes Ilumax PDFJuan David Cardona SepulvedaÎncă nu există evaluări
- Anexo ISO 31010 Julio 2012Document9 paginiAnexo ISO 31010 Julio 2012Wilmer Humberto Guerrero TaboadaÎncă nu există evaluări
- Aforador ParshallDocument15 paginiAforador ParshallMaria TaipeÎncă nu există evaluări
- Informe Encoder Optico 1Document8 paginiInforme Encoder Optico 1Gustavo QuicaliquinÎncă nu există evaluări
- Física Resueltos (Soluciones) de Trabajo y EnergiaDocument13 paginiFísica Resueltos (Soluciones) de Trabajo y Energiamanuel_valle_4Încă nu există evaluări
- 20122sicq000188 2Document22 pagini20122sicq000188 2edgar yadhir perez hernandezÎncă nu există evaluări
- 1.5 Potencia de Una Bomba Centrifuga en Un Circuito Hidráulico.Document4 pagini1.5 Potencia de Una Bomba Centrifuga en Un Circuito Hidráulico.Hanny MejiaÎncă nu există evaluări
- STM 32 F 4 DiscoveryDocument6 paginiSTM 32 F 4 DiscoveryJorge RíosÎncă nu există evaluări
- Memoria de CálculoDocument17 paginiMemoria de Cálculosanty19870% (1)
- Bloque Del MotorDocument13 paginiBloque Del MotorFerNando100% (1)
- Tema 7 ProduccionDocument112 paginiTema 7 ProduccionVianeyÎncă nu există evaluări
- Hoja de Vida Maria Monsalve Muñoz - 1Document7 paginiHoja de Vida Maria Monsalve Muñoz - 1isamunoz199Încă nu există evaluări
- Cuadro ComparativoDocument2 paginiCuadro ComparativoOmar Israel Martinez Ortiz100% (2)
- Informe FisicoquimicaDocument2 paginiInforme FisicoquimicaDaniel VillamizarÎncă nu există evaluări
- Fisica Semana 2 PDocument8 paginiFisica Semana 2 PFelipe Moreno Nfs100% (1)
- Ventilación Impelente, Aspirante y CombinadoDocument49 paginiVentilación Impelente, Aspirante y CombinadoEtel HuayllaniÎncă nu există evaluări
- Manual Descalcificador Curve D-Uf-M3Document26 paginiManual Descalcificador Curve D-Uf-M3gustavoÎncă nu există evaluări