S-ar putea să vă placă și
- Dynamic ODE Equations for Simple Distillation ColumnDocument2 paginiDynamic ODE Equations for Simple Distillation ColumnFilipe Gama FreireÎncă nu există evaluări
- My Son The Fanatic, Short StoryDocument4 paginiMy Son The Fanatic, Short StoryScribdAddict100% (2)
- Module 1 - Introduction To Numerical Methods PDFDocument20 paginiModule 1 - Introduction To Numerical Methods PDFJM Flores De SilvaÎncă nu există evaluări
- HD Data Analytics Functional DataDocument87 paginiHD Data Analytics Functional DataVida GholamiÎncă nu există evaluări
- COPASIDocument14 paginiCOPASIFilipe Gama FreireÎncă nu există evaluări
- Introduction MCC Oxo ProcessDocument5 paginiIntroduction MCC Oxo ProcessDeep PatelÎncă nu există evaluări
- 28301x 3 Week 3 Slides Clean MDocument78 pagini28301x 3 Week 3 Slides Clean MluisÎncă nu există evaluări
- LINEAR MODEL - KEY CONCEPTS OF LINEAR REGRESSIONDocument33 paginiLINEAR MODEL - KEY CONCEPTS OF LINEAR REGRESSIONSwastik SindhaniÎncă nu există evaluări
- Advanced Regression With JMP PRO HandoutDocument46 paginiAdvanced Regression With JMP PRO HandoutGabriel GomezÎncă nu există evaluări
- Applied Statistics II-SLRDocument23 paginiApplied Statistics II-SLRMagnifico FangaWoro100% (1)
- LM Week1 1 2019Document28 paginiLM Week1 1 2019Neel PatelÎncă nu există evaluări
- 2-Mathematical Optimization and Deep LearningDocument53 pagini2-Mathematical Optimization and Deep Learningعزام صالحÎncă nu există evaluări
- Modeling Basics GuideDocument58 paginiModeling Basics GuideFredÎncă nu există evaluări
- MIW Information on parametric and non-parametric modelsDocument31 paginiMIW Information on parametric and non-parametric modelsPavel ZinevkaÎncă nu există evaluări
- Unsupervised Learning and ClusteringDocument26 paginiUnsupervised Learning and ClusteringJay RanjitÎncă nu există evaluări
- unit 5Document104 paginiunit 5downloadjain123Încă nu există evaluări
- Lecture8 2015Document51 paginiLecture8 2015hu jackÎncă nu există evaluări
- An Introduction To Objective Bayesian Statistics PDFDocument69 paginiAn Introduction To Objective Bayesian Statistics PDFWaterloo Ferreira da SilvaÎncă nu există evaluări
- PDF Estimation CorrDocument43 paginiPDF Estimation CorrbiljetsÎncă nu există evaluări
- king3Document10 paginiking3LanceÎncă nu există evaluări
- Chapter 7: Statistical Applications in Traffic EngineeringDocument28 paginiChapter 7: Statistical Applications in Traffic EngineeringMiaÎncă nu există evaluări
- A Variable Step-Size Optimization Algorithm Based On A Special Numerical Method To Solve The System of Nonlinear EquationsDocument5 paginiA Variable Step-Size Optimization Algorithm Based On A Special Numerical Method To Solve The System of Nonlinear EquationsFanny ochoaÎncă nu există evaluări
- M1: Numerical Methods Intro Discrete Algebra Accuracy ErrorsDocument40 paginiM1: Numerical Methods Intro Discrete Algebra Accuracy ErrorsCollano M. Noel RogieÎncă nu există evaluări
- GLM Lec 1Document7 paginiGLM Lec 1HazemIbrahimÎncă nu există evaluări
- Machine Learning Basics: Estimators, Bias and VarianceDocument23 paginiMachine Learning Basics: Estimators, Bias and VarianceJay VeeÎncă nu există evaluări
- My NotesDocument15 paginiMy NotesowenwongsohyikÎncă nu există evaluări
- Basic Concepts of Inference: Corresponds To Chapter 6 of Tamhane and DunlopDocument40 paginiBasic Concepts of Inference: Corresponds To Chapter 6 of Tamhane and Dunlopakirank1Încă nu există evaluări
- Experimental Uncertainties: A Practical GuideDocument17 paginiExperimental Uncertainties: A Practical GuideSinam_Hudson_1016Încă nu există evaluări
- Linear Regression Model with Gradient DescentDocument52 paginiLinear Regression Model with Gradient DescentshinjoÎncă nu există evaluări
- Model EvaluationDocument80 paginiModel EvaluationDeva Hema DÎncă nu există evaluări
- Outline and Equation Sheet For M E 345: Every Additive Term in An Equation Must Have The Same DimensionsDocument7 paginiOutline and Equation Sheet For M E 345: Every Additive Term in An Equation Must Have The Same DimensionsMohammedÎncă nu există evaluări
- Curve Fitting TechniquesDocument185 paginiCurve Fitting TechniquesAzmiHafifiÎncă nu există evaluări
- Linear RegressionDocument75 paginiLinear RegressionAaqib InamÎncă nu există evaluări
- Linear Discriminant Functions: Minimum Squared Error Procedures: Ho-Kashyap ProceduresDocument22 paginiLinear Discriminant Functions: Minimum Squared Error Procedures: Ho-Kashyap ProceduresRachnaÎncă nu există evaluări
- Point EstimationDocument7 paginiPoint EstimationTvarita SurendarÎncă nu există evaluări
- 6.2 K MeansDocument23 pagini6.2 K MeansMatrix BotÎncă nu există evaluări
- Content PDFDocument61 paginiContent PDFAndika SaputraÎncă nu există evaluări
- Foundations of Machine LearningDocument15 paginiFoundations of Machine LearningDilip SinghÎncă nu există evaluări
- CH 02Document41 paginiCH 02Marwan SamyÎncă nu există evaluări
- Introduction To Machine Learning Lecture 2: Linear RegressionDocument38 paginiIntroduction To Machine Learning Lecture 2: Linear RegressionDeepa DevarajÎncă nu există evaluări
- Business Statistics Key FormulasDocument5 paginiBusiness Statistics Key FormulasMichal_Kramarz_619150% (4)
- Chapter 7Document28 paginiChapter 7khalid haddadinÎncă nu există evaluări
- Neural Network Lectures on Radial Basis FunctionsDocument44 paginiNeural Network Lectures on Radial Basis FunctionsYekanth RamÎncă nu există evaluări
- Conf Beliakov 22 07 09Document43 paginiConf Beliakov 22 07 09Jalə RəhimliÎncă nu există evaluări
- R O M H A H A: Educed Rder Odeling Ybrid Pproach Ybrid PproachDocument30 paginiR O M H A H A: Educed Rder Odeling Ybrid Pproach Ybrid PproachLei TuÎncă nu există evaluări
- Statistics For Traffic EngineersDocument55 paginiStatistics For Traffic EngineerssaliniÎncă nu există evaluări
- Welcome To:: Simple Linear RegressionDocument33 paginiWelcome To:: Simple Linear RegressionAasmiÎncă nu există evaluări
- SAHADEB - Logistic Reg - Sessions 8-10Document145 paginiSAHADEB - Logistic Reg - Sessions 8-10Writabrata BhattacharyaÎncă nu există evaluări
- Learning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Document22 paginiLearning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Mustefa MohammedÎncă nu există evaluări
- InterviewDocument4 paginiInterviewscientist01234Încă nu există evaluări
- 10.1 Types of Constrained Optimization AlgorithmsDocument24 pagini10.1 Types of Constrained Optimization AlgorithmsRachit SharmaÎncă nu există evaluări
- Soft Computing Module - Fuzzy Set TheoryDocument70 paginiSoft Computing Module - Fuzzy Set TheoryDeepak BhandareÎncă nu există evaluări
- AIC Tutorial - HuDocument19 paginiAIC Tutorial - HujitenparekhÎncă nu există evaluări
- DSCI 303 Machine Learning Problem Set 4Document5 paginiDSCI 303 Machine Learning Problem Set 4Anonymous StudentÎncă nu există evaluări
- Lecture 2 - Supervised LearningDocument6 paginiLecture 2 - Supervised LearningEric WangÎncă nu există evaluări
- The Linear Regression ModelDocument25 paginiThe Linear Regression ModelPorshe56Încă nu există evaluări
- Chap 17 WebDocument40 paginiChap 17 WebFelix ChanÎncă nu există evaluări
- Little Niss Oct1014Document40 paginiLittle Niss Oct1014José SánchezÎncă nu există evaluări
- Chapter 3Document33 paginiChapter 3VaradharajanSrinivasanÎncă nu există evaluări
- F-BachDocument36 paginiF-BachGS SINDHUÎncă nu există evaluări
- Trip Generation AnalysisDocument56 paginiTrip Generation AnalysisSourab VokkalkarÎncă nu există evaluări
- Mlmultiplelinearregression 170919114353 PDFDocument8 paginiMlmultiplelinearregression 170919114353 PDFNguyen Huu Hanh LamÎncă nu există evaluări
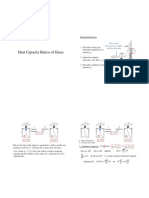
- Heat Capacity Ratios For GasesDocument3 paginiHeat Capacity Ratios For GasesFilipe Gama FreireÎncă nu există evaluări
- !6 C 6 F 6363756 C 6174696 F 6 eDocument13 pagini!6 C 6 F 6363756 C 6174696 F 6 eAyu Humaira Muchlis100% (1)
- Control BookDocument422 paginiControl BookFilipe Gama FreireÎncă nu există evaluări
- 1 Kinetic Theory of GasesDocument10 pagini1 Kinetic Theory of GasesEllia WahyuniÎncă nu există evaluări
- Gases Serve As Anesthetics Liquid Alkanes Light Liquids Harmful To Lungs Heavy Liquids Mineral Oil Petroleum JellyDocument23 paginiGases Serve As Anesthetics Liquid Alkanes Light Liquids Harmful To Lungs Heavy Liquids Mineral Oil Petroleum JellyFilipe Gama FreireÎncă nu există evaluări
- 1 Concepts of Thermodynamics HoDocument9 pagini1 Concepts of Thermodynamics HoFilipe Gama FreireÎncă nu există evaluări
- User's Manual: TOSHIBA Mini NB200 SeriesDocument136 paginiUser's Manual: TOSHIBA Mini NB200 SeriesFilipe Gama FreireÎncă nu există evaluări
- Ode Solvers v2Document1 paginăOde Solvers v2Filipe Gama FreireÎncă nu există evaluări
- Syllabus For First Class 2013-2014 Msc. Ismail M.AliDocument26 paginiSyllabus For First Class 2013-2014 Msc. Ismail M.AliFilipe Gama FreireÎncă nu există evaluări
- RedecantaDocument6 paginiRedecantaFilipe Gama FreireÎncă nu există evaluări
- Lab 1Document5 paginiLab 1Filipe Gama FreireÎncă nu există evaluări
- New Three-Phase Reactor For Catalytic Hydrogenation of Vegetable OilsDocument12 paginiNew Three-Phase Reactor For Catalytic Hydrogenation of Vegetable OilsFilipe Gama FreireÎncă nu există evaluări
- Applications MixerDocument27 paginiApplications MixerFilipe Gama FreireÎncă nu există evaluări
- Tempo M Edio de Resid Encia: FGF 2012 (IST)Document19 paginiTempo M Edio de Resid Encia: FGF 2012 (IST)Filipe Gama FreireÎncă nu există evaluări
- Derive The Integrated Rate Equation Half-LifeDocument7 paginiDerive The Integrated Rate Equation Half-Lifeumut2000Încă nu există evaluări
- Anular Sludge Water and Environmental Management SeriesDocument181 paginiAnular Sludge Water and Environmental Management SeriesFilipe Gama FreireÎncă nu există evaluări
- Ubiquiti Af60-Xr DatasheetDocument3 paginiUbiquiti Af60-Xr Datasheetayman rifaiÎncă nu există evaluări
- Moment Influence Line LabsheetDocument12 paginiMoment Influence Line LabsheetZAXÎncă nu există evaluări
- TOS 22402 Winter 19th I SCHEME Paper Model Answer PaperDocument25 paginiTOS 22402 Winter 19th I SCHEME Paper Model Answer Paperirshadmirza753Încă nu există evaluări
- PS Neo HSK2LCD ICON LED RF Keypad v1 0 Installation Guide R001 en FR Es PoDocument40 paginiPS Neo HSK2LCD ICON LED RF Keypad v1 0 Installation Guide R001 en FR Es Po7seguridadÎncă nu există evaluări
- The German eID-Card by Jens BenderDocument42 paginiThe German eID-Card by Jens BenderPoomjit SirawongprasertÎncă nu există evaluări
- Kara&Suoglu ProjectreportDocument4 paginiKara&Suoglu ProjectreportRicard Comas xacnóÎncă nu există evaluări
- Assignment 2Document4 paginiAssignment 2maxamed0% (1)
- 6470b0e5f337ed00180c05a4 - ## - Atomic Structure - DPP-01 (Of Lec-03) - Arjuna NEET 2024Document3 pagini6470b0e5f337ed00180c05a4 - ## - Atomic Structure - DPP-01 (Of Lec-03) - Arjuna NEET 2024Lalit SinghÎncă nu există evaluări
- APM200 Outdoor Power Supply System User Manual-20060628-B-1.0Document52 paginiAPM200 Outdoor Power Supply System User Manual-20060628-B-1.0Andrés MarroquínÎncă nu există evaluări
- RoutineHub - R Download - iOS 13, 14, 15, 2Document1 paginăRoutineHub - R Download - iOS 13, 14, 15, 2Gabriell AnjosÎncă nu există evaluări
- De Thi HK 2 Tieng Anh 9 de 2Document17 paginiDe Thi HK 2 Tieng Anh 9 de 2Lê Thu HiềnÎncă nu există evaluări
- Sample of Accident Notification & Investigation ProcedureDocument2 paginiSample of Accident Notification & Investigation Procedurerajendhar100% (1)
- Writing A Formal Letter To The PresidentDocument1 paginăWriting A Formal Letter To The PresidentPiaAnaisÎncă nu există evaluări
- Philippine Politics Concepts ExplainedDocument3 paginiPhilippine Politics Concepts ExplainedAngel Lyn A Lacerna100% (1)
- Explanation of Four Ahadeeth From Imaam Al-Bukhaaree's Al-Adab-Ul-MufradDocument4 paginiExplanation of Four Ahadeeth From Imaam Al-Bukhaaree's Al-Adab-Ul-MufradMountainofknowledgeÎncă nu există evaluări
- Horizontal Vertical MarketDocument4 paginiHorizontal Vertical MarketVikasÎncă nu există evaluări
- China Sichuan Province Se'Ergu Hydro Power Project PDD 20080821Document50 paginiChina Sichuan Province Se'Ergu Hydro Power Project PDD 20080821akhilkuwarÎncă nu există evaluări
- Economics and The Theory of Games - Vega-Redondo PDFDocument526 paginiEconomics and The Theory of Games - Vega-Redondo PDFJaime Andrés67% (3)
- 7 Tools for Continuous ImprovementDocument202 pagini7 Tools for Continuous Improvementvivekanand bhartiÎncă nu există evaluări
- MB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsDocument11 paginiMB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsAli Asharaf Khan100% (3)
- Surface Coating ProcessesDocument7 paginiSurface Coating ProcessesSailabala ChoudhuryÎncă nu există evaluări
- Air Con LouvresDocument1 paginăAir Con LouvresChung May LynnÎncă nu există evaluări
- Turabian Sample PaperDocument9 paginiTurabian Sample Paperemme_lopez908133% (3)
- Ifatsea Atsep Brochure 2019 PDFDocument4 paginiIfatsea Atsep Brochure 2019 PDFCondor GuatonÎncă nu există evaluări
- T Cells & Autoimmunity, s3Document21 paginiT Cells & Autoimmunity, s3LiaAriestaÎncă nu există evaluări
- Product Manual 82434 (Revision C) : Generator Loading ControlDocument26 paginiProduct Manual 82434 (Revision C) : Generator Loading ControlAUGUSTA WIBI ARDIKTAÎncă nu există evaluări
- Preparatory Lights and Perfections: Joseph Smith's Training with the Urim and ThummimDocument9 paginiPreparatory Lights and Perfections: Joseph Smith's Training with the Urim and ThummimslightlyguiltyÎncă nu există evaluări
- Mini Centre CatalogDocument26 paginiMini Centre CatalogJohn EarleyÎncă nu există evaluări